




阅读“GNSS/INS 组合导航软件开发”作者陈凯文章,如下总结
在松组合中,GNSS 使用单独的滤波器输出位 置和速度信息,位置和速度再作为量测信息与 INS 进行组合,在紧组合中, GNSS 不再使用单独的滤波器,而是将 GNSS 原始观测值与 INS 进行融合,使用 组合滤波器估计导航参数。
1、紧组合模式结构图
如下图所示,在紧组合中,INS 递推的位置和速度与外界辅助信息以及误差改正信息组成预测的 GNSS 观测值,接下来 预测的观测值与测量的 GNSS 观测值构成观测新息,最后进入紧组合滤波器估 计误差状态参数,然后再对导航解、元器件误差和 GNSS 误差进行反馈校正。
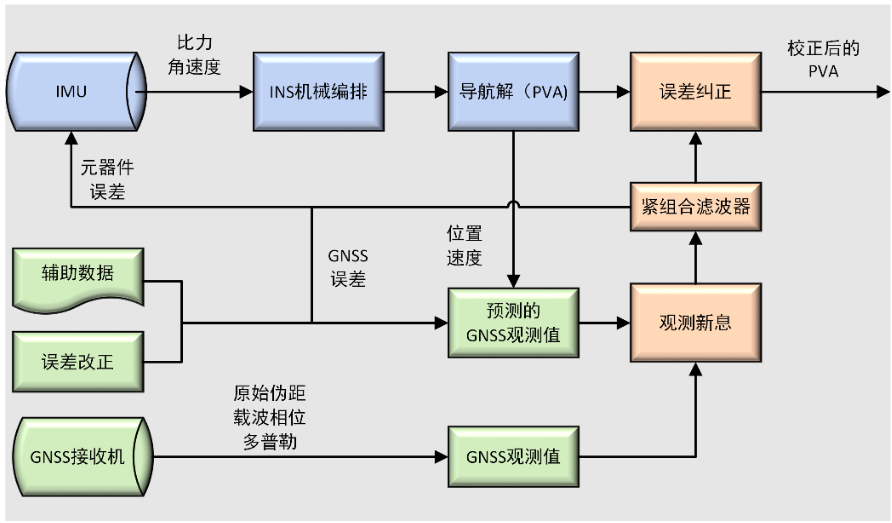
辅助数据是值 GNSS 解算需要的文件,包括广播星历、精密星历与钟差、天线文件、DCB 文件、ERP 文件和 BLQ 文件等。
误差改正是对部分可用精确模型改正的 GNSS 误差进行改正。
GNSS 观测值表示双差观测值。
2、GNSS原始观测:
GNSS原始观测方程=伪距+载波相位+多普勒=(2-1)+(2-2)+(2-5)
(2-1)伪距原始观测方程
(2-2)载波相位的原始观测方程

P/L表示伪距/载波相位观测值(米);
r/s表示接收机/卫星;j表示频率;c表示光速
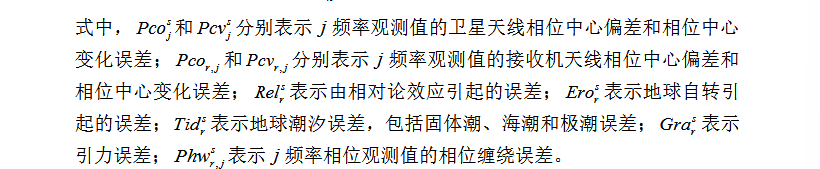
(2-1)第一项表示接收机和卫星之间的几何距离;第二项表示光速乘以接收机钟差;第三项表示光速乘以卫星钟差;第四项表示对流层延迟误差;第五项表示j频率观测值的电离层延迟误差;第六项表示光速乘以j频率伪距在接收机端和卫星端的硬件延迟误差;第七项表示伪距观测值中可用精确模型改正的误差项;第八项表示伪距观测值中未模型化的误差项,包括多路径误差和接收机测量噪声。
(2-2)第六项表示光速乘以j频率下相位在接收机端和卫星端的硬件延迟误差;第七项表示j频率下相位观测值的波长和模糊度乘积;第八项表示相位观测值中可用精确模型改正的误差项;第九项表示相位观测值中未模型化的误差项,包括多路径误差和接收机测量噪声。
(2-3)伪距原始观测方程中的第七项
(2-4)载波相位的原始观测方程的第八项

(2-5)多普勒观测值方程:
![]()
GNSS 原始观测值中包含了众多误差,比如卫星端的硬件延迟误差、传播路径上的电离层误差、接收机端的钟差等等,这些误差有一部分可以通过差分操作、线性组合和经验模型消除或减弱,还有一部分则需要作为待估参数进行估计。RTK 技术是利用差分操作,消除卫星端、传播路径上和接收机端的大部分公共误差,构建双差载波相位和双差伪距观测值,通过 LAMBDA 算法固定模 糊度实现高精度定位。
3、PPK模型:
1、观测模式
根据上述的(2-1)(2-2)先进行站间单差

再进行星间二次差,得到双差观测模型

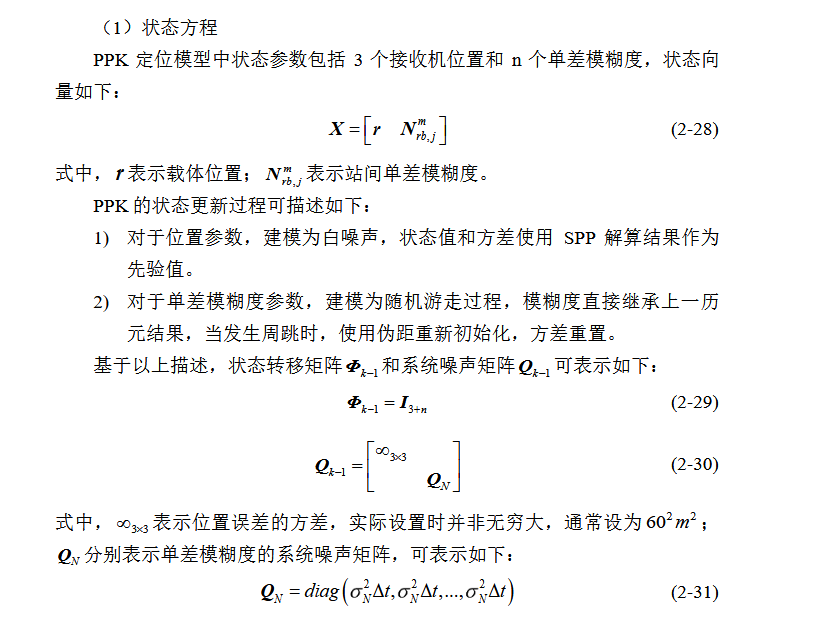
2、滤波模型
4、PPK/INS
1、状态矩阵
比松组合的参数多了个站间单差模糊度误差参数

将其的噪声建模为随机游走可得到以下
因此紧组合的状态转移方程就在松组合的方程上多加了模糊度转移部分,也就是I,而系统噪声驱动方差也在松组合上面多加了模糊度转移部分的随机游走噪声标准差如下

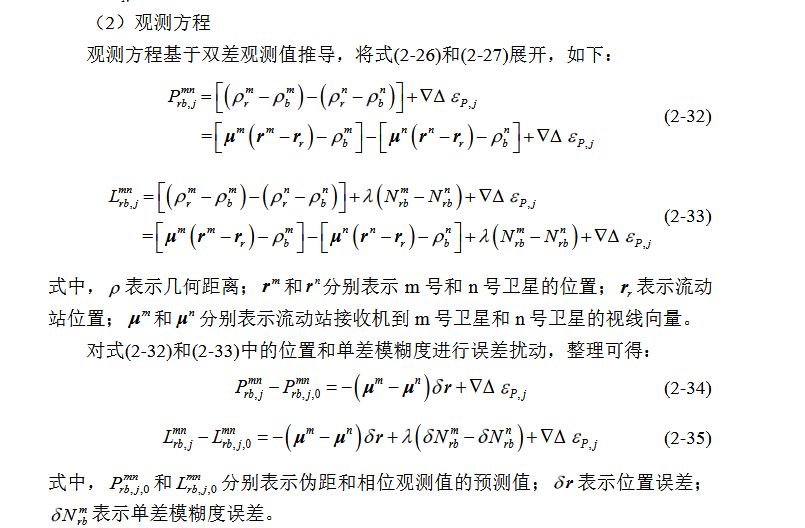
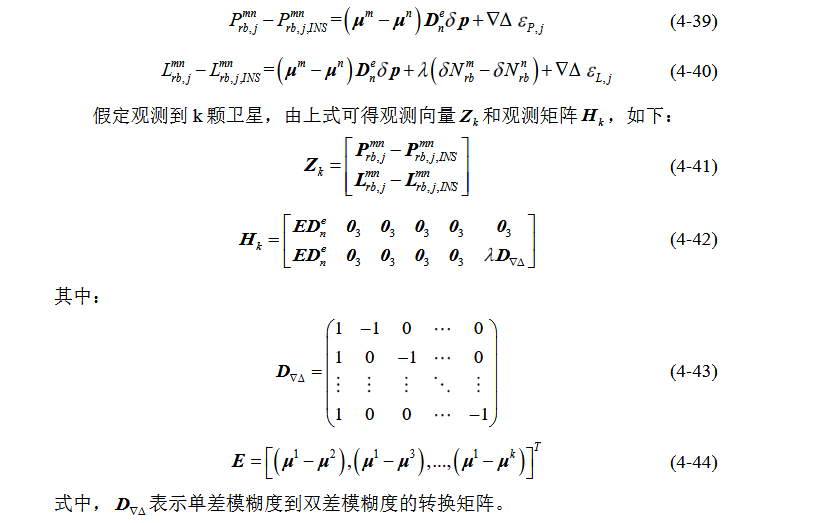
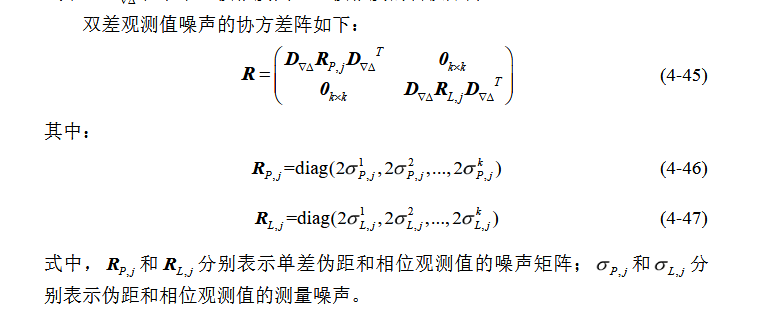
2、观测方程


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









