



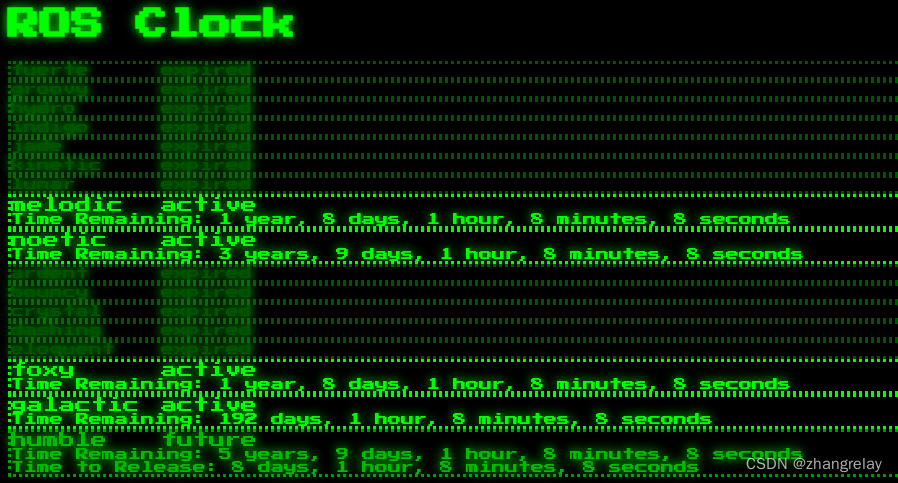
 该网页展示了一个ROS(Robot Operating System)不同版本的时间线,包括它们的起始和结束日期。通过JavaScript更新,页面实时显示每个版本的状态,如'future', 'active', 或 'expired',并计算剩余或距发布的时间。这对于跟踪ROS版本的生命周期和支持状态非常有用。
该网页展示了一个ROS(Robot Operating System)不同版本的时间线,包括它们的起始和结束日期。通过JavaScript更新,页面实时显示每个版本的状态,如'future', 'active', 或 'expired',并计算剩余或距发布的时间。这对于跟踪ROS版本的生命周期和支持状态非常有用。
网址:dlu.github.io/ros_clock/index.html
"noetic": {"start": "May 23, 2020", "end": "May 23, 2025"},
"humble": {"start": "May 23, 2022", "end": "May 23, 2027"},
效果如下:
var timing = {
//"boxturtle": {"start": "March 2, 2010", "end": ""},
//"cturtle": {"start": "August 2, 2010", "end": ""},
// "diamondback": {"start": "March 2, 2011", "end": ""},
//"electric": {"start": "August 30, 2011", "end": ""},
"fuerte": {"start": "April 23, 2012", "end": "Sept 4, 2013"},
"groovy": {"start": "Dec 31, 2012", "end": "July 1, 2014"},
"hydro": {"start": "Sept 4, 2013", "end": "May 1, 2015"},
"indigo": {"start": "July 22, 2014", "end": "April 1, 2019"},
"jade": {"start": "May 23, 2015", "end": "May 1, 2017"},
"kinetic": {"start": "May 23, 2016", "end": "April 1, 2021"},
"lunar": {"start": "May 23, 2017", "end": "May 23, 2019"},
"melodic": {"start": "May 23, 2018", "end": "May 23, 2023"},
"noetic": {"start": "May 23, 2020", "end": "May 23, 2025"},
"ardent": {"start": "Dec 8, 2017", "end": "Dec 1, 2018"},
"bouncy": {"start": "July 2, 2018", "end": "July 1, 2019"},
"crystal": {"start": "Dec 14, 2018", "end": "Dec 1, 2019"},
"dashing": {"start": "May 31, 2019", "end": "May 23, 2021"},
"eloquent": {"start": "November 22, 2019","end": "November 1, 2020"},
"foxy": {"start": "June 5, 2020", "end": "May 23, 2023"},
"galactic": {"start": "May 23, 2021", "end": "November 23, 2022"},
"humble": {"start": "May 23, 2022", "end": "May 23, 2027"},
}
<html>
<head>
<meta charset="utf-8" />
<title>ROS Clock</title>
<link href="https://fonts.googleapis.com/css?family=Press+Start+2P&display=swap" rel="stylesheet">
<link href="terminal.css" rel="stylesheet">
<script src="info.js"></script>
<script src="countdown.js"></script>
</head>
<body>
<h1>ROS Clock</h1>
<div id="contents"></div>
<script>
function update()
{
updateDict();
var contents = document.getElementById("contents");
contents.innerHTML = '';
for (key in timing)
{
var entry = timing[key];
var row = document.createElement('div');
row.setAttribute('class', "row " + entry["status"]);
contents.appendChild(row);
var head = document.createElement('span');
head.setAttribute('class', 'distro')
head.appendChild(document.createTextNode(key));
row.appendChild(head);
row.appendChild(document.createTextNode(entry["status"]));
if (entry["status"] != "expired")
{
row.appendChild(document.createElement('br'));
var countdown = document.createElement('span');
countdown.setAttribute('class', 'countdown')
countdown.appendChild(document.createTextNode('Time Remaining: '));
countdown.appendChild(document.createTextNode(deltaToString(entry["delta"])));
row.appendChild(countdown);
if (entry["status"] == "future")
{
row.appendChild(document.createElement('br'));
var countdown = document.createElement('span');
countdown.setAttribute('class', 'countdown')
countdown.appendChild(document.createTextNode('Time to Release: '));
countdown.appendChild(document.createTextNode(deltaToString(entry["release"])));
row.appendChild(countdown);
}
}
}
}
setInterval(update, 1000);
update();
</script>
</body>
</html>

















 1146
1146

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









