




UniADhttps://github.com/OpenDriveLab/UniAD是面向行车规划集感知(目标检测与跟踪)、建图(不是像SLAM那样对环境重建的建图,而是实时全景分割图像里的道路、隔离带等行车需关注的相关物体)、和轨迹规划和占用预测等多任务模块于一体的统一大模型。官网上的安装说明是按作者使用的较低版本的CUDA11.1.1和pytorch1.9.1来的,对应的mmcv也是较低版本的1.4版,我们工作服务器上的nvidia ngc docker环境里使用的这些支持工具软件早已是较高版本的,于是想在我们自己的环境里把UniAD跑起来,安装过程中遇到一些坑,最终都一一解决了,也实测过了,UniAD完全可以正常跑在CUDA11.6+pytorch1.12.0+mmcv1.6+mmseg0.24.0+mmdet2.24+mmdet3d1.0.0rc4组成的环境下。
安装和解决问题的步骤如下:
1.拉取使用CUDA11.6的NVIDIA NGC docker镜像并创建容器作为UniAD的运行环境
2.安装pytorch和torchvision:
pip install torch==1.12.0+cu116 torchvision==0.13.0+cu116 torchaudio==0.12.0 --extra-index-url https://download.pytorch.org/whl/cu116
3.检查CUDA_HOME环境变量是否已设置,如果没有,则设置一下:
export CUDA_HOME=/usr/local/cuda
4.受CUDA和pytorch版本限制,mmcv需要安装比1.4高版本的1.6.0(关于openmmlab的mm序列框架包的安装版本对应关系参见openMMLab的mmcv和mmdet、mmdet3d、mmseg版本对应关系-优快云博客: )
pip install mmcv-full==1.6.0 -f https://download.openmmlab.com/mmcv/dist/cu116/torch1.12.0/index.html
按照下面的对应关系:
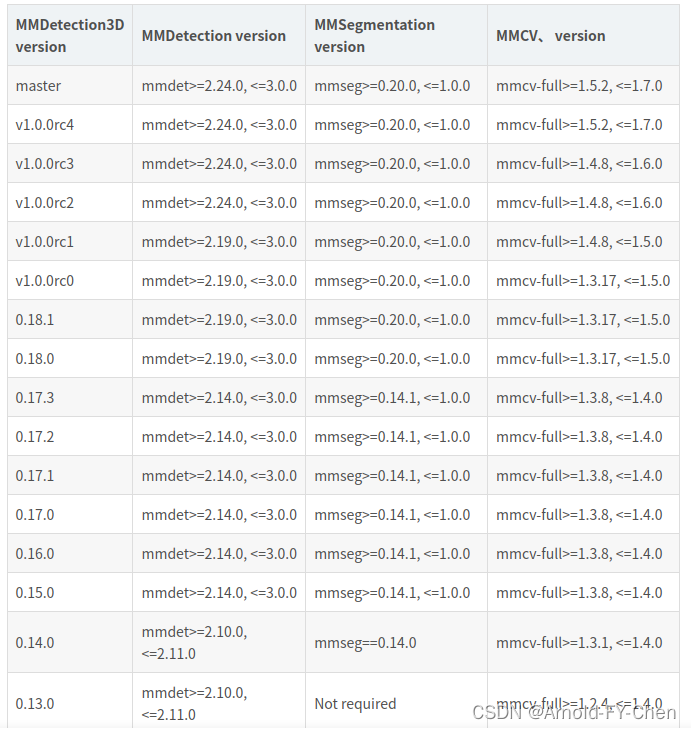
分别安装mmdet2.24.0和mmseg0.24.0
pip install mmdet==2.24.0
pip install mmsegmentation==0.24.0
下载mmdetection3d源码然后切换到v1.0.0rc4版:
git clone https://github.com/open-mmlab/mmdetection3d.git
cd mmdetection3d
git checkout v1.0.0rc4
安装支持包并从源码编译和安装mmdet3d:
pip install scipy==1.7.3
pip install scikit-image==0.20.0
#将requirements/runtime.txt里修改一下numba的版本:
numba==0.53.1
#numba==0.53.0
pip install -v -e .
安装好了支持环境,然后下载和安装UniAD:
git clone https://github.com/OpenDriveLab/UniAD.git
cd UniAD
#修改一下requirements.txt里的numpy版本然后安装相关支持包:
#numpy==1.20.0
numpy==1.22.0
pip install -r requirements.txt
#下载相关预训练权重文件
mkdir ckpts && cd ckpts
wget https://github.com/zhiqi-li/storage/releases/download/v1.0/bevformer_r101_dcn_24ep.pth
wget https://github.com/OpenDriveLab/UniAD/releases/download/v1.0/uniad_base_track_map.pth
wget https://github.com/OpenDriveLab/UniAD/releases/download/v1.0.1/uniad_base_e2e.pth
按照https://github.com/OpenDriveLab/UniAD/blob/main/docs/DATA_PREP.md说明下载和展开整理NuScenes数据集
下载data infos文件:
cd UniAD/data
mkdir infos && cd infos
wget https://github.com/OpenDriveLab/UniAD/releases/download/v1.0/nuscenes_infos_temporal_train.pkl # train_infos
wget https://github.com/OpenDriveLab/UniAD/releases/download/v1.0/nuscenes_infos_temporal_val.pkl # val_infos假如NuScenes数据集和data infos文件已经下载好并解压存放到 ./data/下了并按照下面的结构存放的:
UniAD
├── projects/
├── tools/
├── ckpts/
│ ├── bevformer_r101_dcn_24ep.pth
│ ├── uniad_base_track_map.pth
| ├── uniad_base_e2e.pth
├── data/
│ ├── nuscenes/
│ │ ├── can_bus/
│ │ ├── maps/
│ │ │ ├──36092f0b03a857c6a3403e25b4b7aab3.png
│ │ │ ├──37819e65e09e5547b8a3ceaefba56bb2.png
│ │ │ ├──53992ee3023e5494b90c316c183be829.png
│ │ │ ├──93406b464a165eaba6d9de76ca09f5da.png
│ │ │ ├──basemap
│ │ │ ├──expansion
│ │ │ ├──prediction
│ │ ├── samples/
│ │ ├── sweeps/
│ │ ├── v1.0-test/
│ │ ├── v1.0-trainval/
│ ├── infos/
│ │ ├── nuscenes_infos_temporal_train.pkl
│ │ ├── nuscenes_infos_temporal_val.pkl
│ ├── others/
│ │ ├── motion_anchor_infos_mode6.pkl注意:map(v1.3) extensions压缩包下载后展开的三个目录basemap、expansion、prediction需要放在maps目录下,而不是和samples、sweeps等目录平级,NuScenes的train所有数据压缩包展开后,samples的最底层的每个子目录下都是34149张图片,sweeps里的子母录下的图片数量则是不等的,例如:163881、164274、164166、161453、160856、164266...等,把没有标注的test数据的压缩包在nuscenes目录下展开后,其里面samples和sweeps目录里子目录下的图片会自动拷贝到nuscenes/samples和nuscenes/sweeps下的对应子目录里去,再次统计会看到samples下的每个子目录里的图片数量变成了40157,而sweeps下的子目录里的图片数量则变成了193153、189171、189905、193082、193168、1
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











