







 CAN FD为汽车通信提供了更高的数据速率,但面临振铃问题影响通信可靠性。AUTOSAR SecOC提供了数据安全性,防止重放、欺骗和篡改攻击。RSC振铃抑制电路解决了CAN FD网络中的振铃问题,兼容ISO11898-2标准,使SecOC能有效应用于CAN FD,提升车载安全通信水平。
CAN FD为汽车通信提供了更高的数据速率,但面临振铃问题影响通信可靠性。AUTOSAR SecOC提供了数据安全性,防止重放、欺骗和篡改攻击。RSC振铃抑制电路解决了CAN FD网络中的振铃问题,兼容ISO11898-2标准,使SecOC能有效应用于CAN FD,提升车载安全通信水平。
20多年来,CAN一直是并且仍然是车辆中的主导通信系统。 随着车载功能日益复杂,传统CAN已无法满足对有效数据速率日益增长的需求。 因此,引入了CAN FD—它允许高达64字节的有效载荷以实现2 Mbit/s 和5 Mbit/s的数据速率。为了将这一主要优势用于高级功能,必须解决更大网络拓扑的挑战。 特别是所谓的振铃效应对通信的可靠性有很大的影响。 CAN FD的主要优点之一是它使用AUTOSAR板载安全通信 (SecOC) 为单协议数据单元提供安全性。
1、振铃
在具有两个以上节点的CANFD网络中,由于网络中在信号转换频率上的阻抗不匹配而产生的通信电压波的反射会产生振铃。阻抗不匹配主要发生在非末端节点和结节处。当收发器输出一个隐性状态时,收发器的输出具有一个很高的阻抗。因此,信号振铃经常发生在从隐性位到显性位的过渡过程中。此外,由于阻抗减小,在结节处发生负反射。这导致阻抗低于特征阻抗。如果振铃在采样点不收敛到预定电压以下,则发生位故障。
为了避免这种情况,我们开发了所谓的RSC-振铃抑制电路。该电路检测从显性状态到隐性状态的变化,并将阻抗改变到120欧姆。内部MOS组件检测到该下降边缘激活振铃抑制。这种抑制电路可以看作是一个由电阻和开关组成的电路,它把网络中的能量释放出去。RSC兼容所有ISO11898-2的收发器,因此,它可用于CAN FD网络,工程师可以利用CAN FD的所有技术优势开发软件。RSC已在CiA中定义为CiA 601-4,并不断改进601-4推进ISO级别 (11898-2) 的标准化活动。
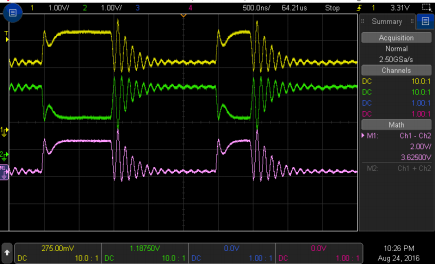
图1
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 595
595

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









