







具体如下图:
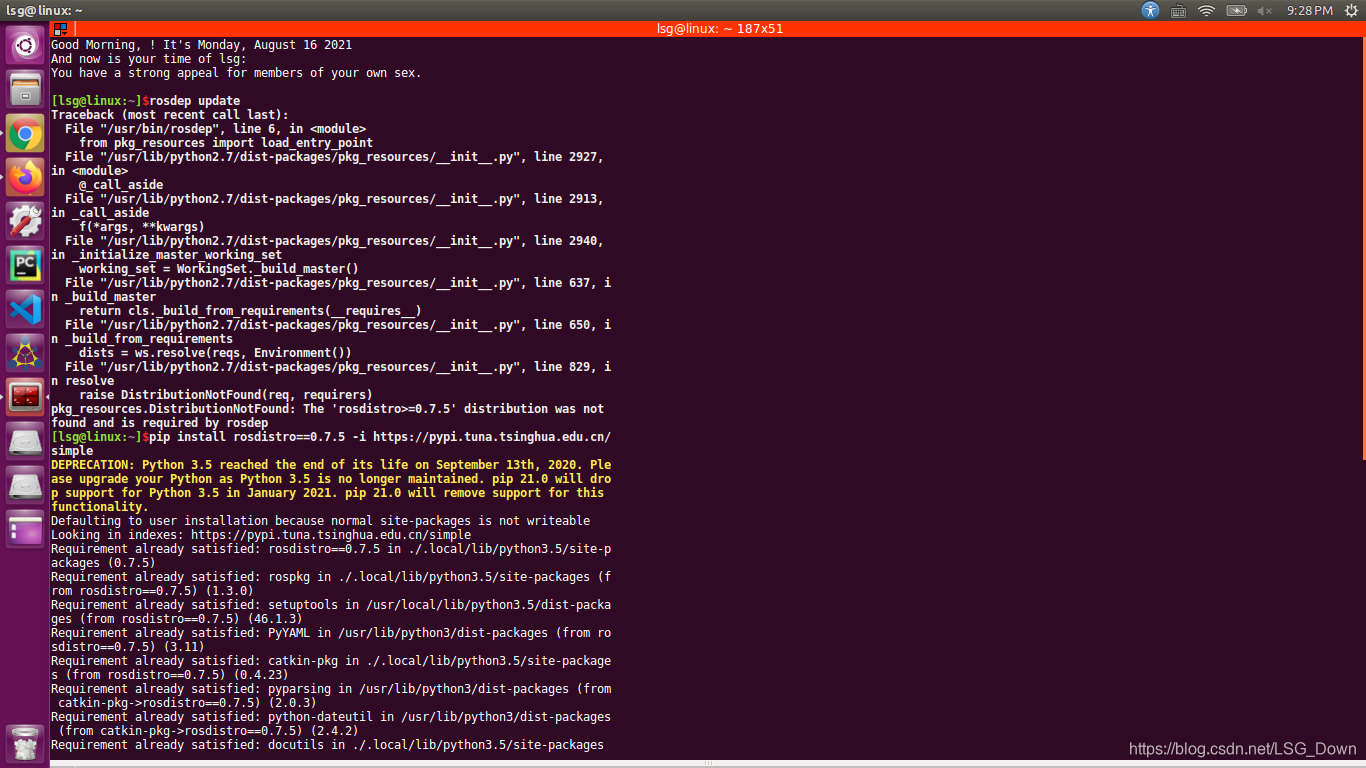
网上多种方法尝试,都不行
后来到官网完美解决:
sudo apt-get update
sudo apt-get install python-rosdistro
具体如下图:
网上多种方法尝试,都不行
后来到官网完美解决:
sudo apt-get update
sudo apt-get install python-rosdistro
 3977
833
1278
1万+
7015
5672
3977
833
1278
1万+
7015
5672

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























