




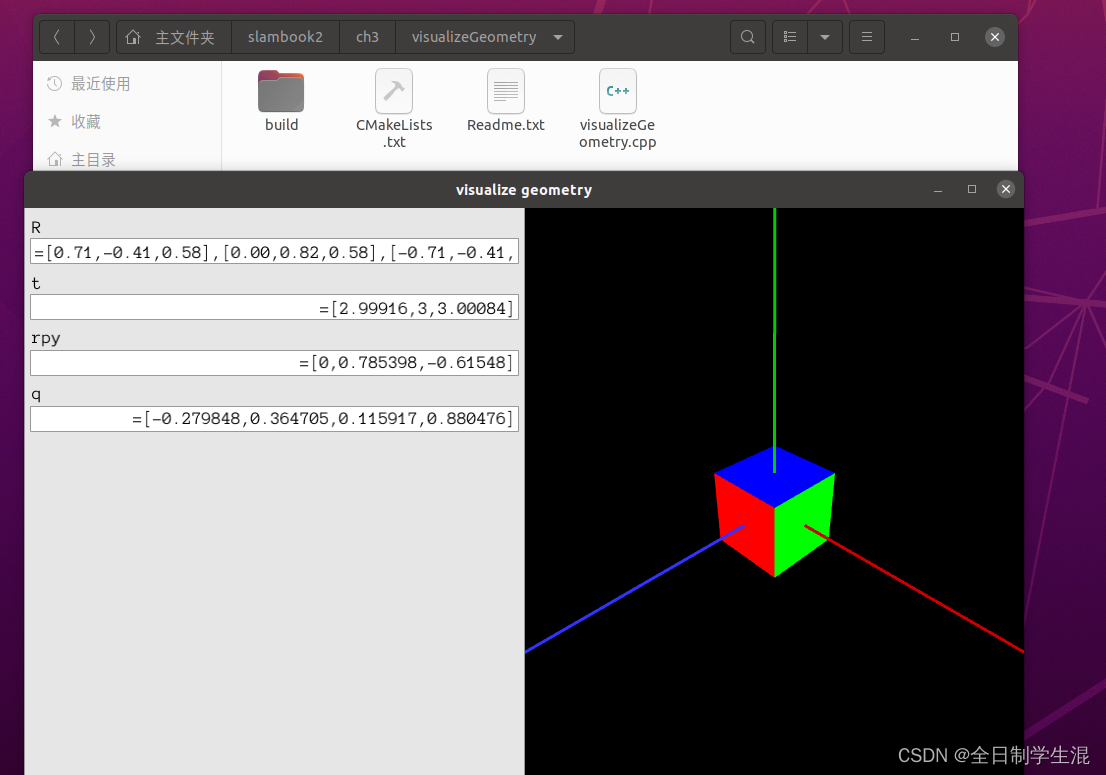
 博主在学习高翔博士的SLAM教程时遇到CMake配置问题,通过修改CMakeLists.txt中一行代码解决了pangolin库与C++11编译器的兼容性问题,确保了visualizeGeometry demo的顺利编译与执行。
博主在学习高翔博士的SLAM教程时遇到CMake配置问题,通过修改CMakeLists.txt中一行代码解决了pangolin库与C++11编译器的兼容性问题,确保了visualizeGeometry demo的顺利编译与执行。
最近在学高翔博士的《SLAM十四讲》,在ch3中运行vistalizegeometry这个demo的时候,出现如下报错信息(图片版报错看不清的话,文末附文字版的报错信息):
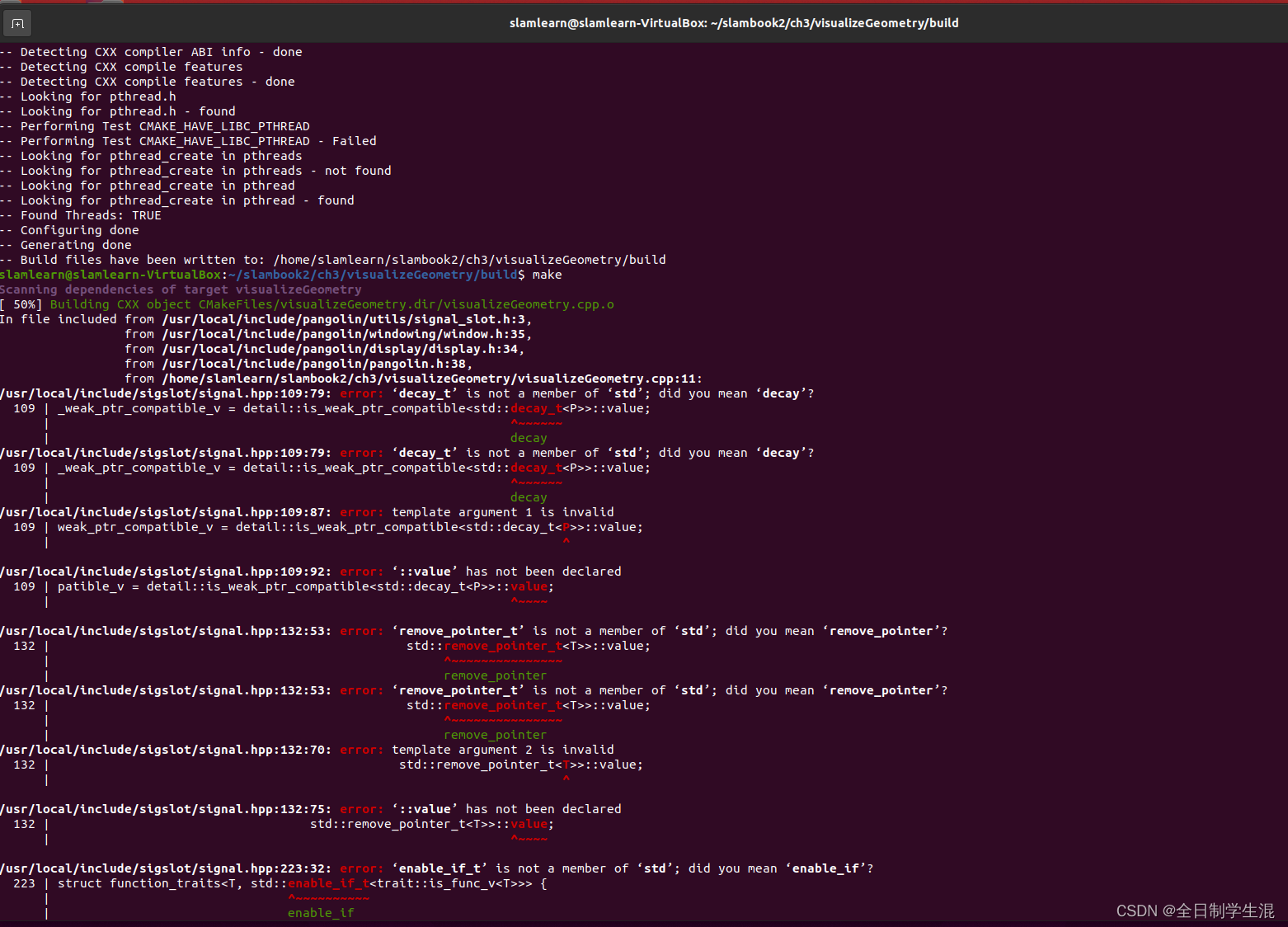
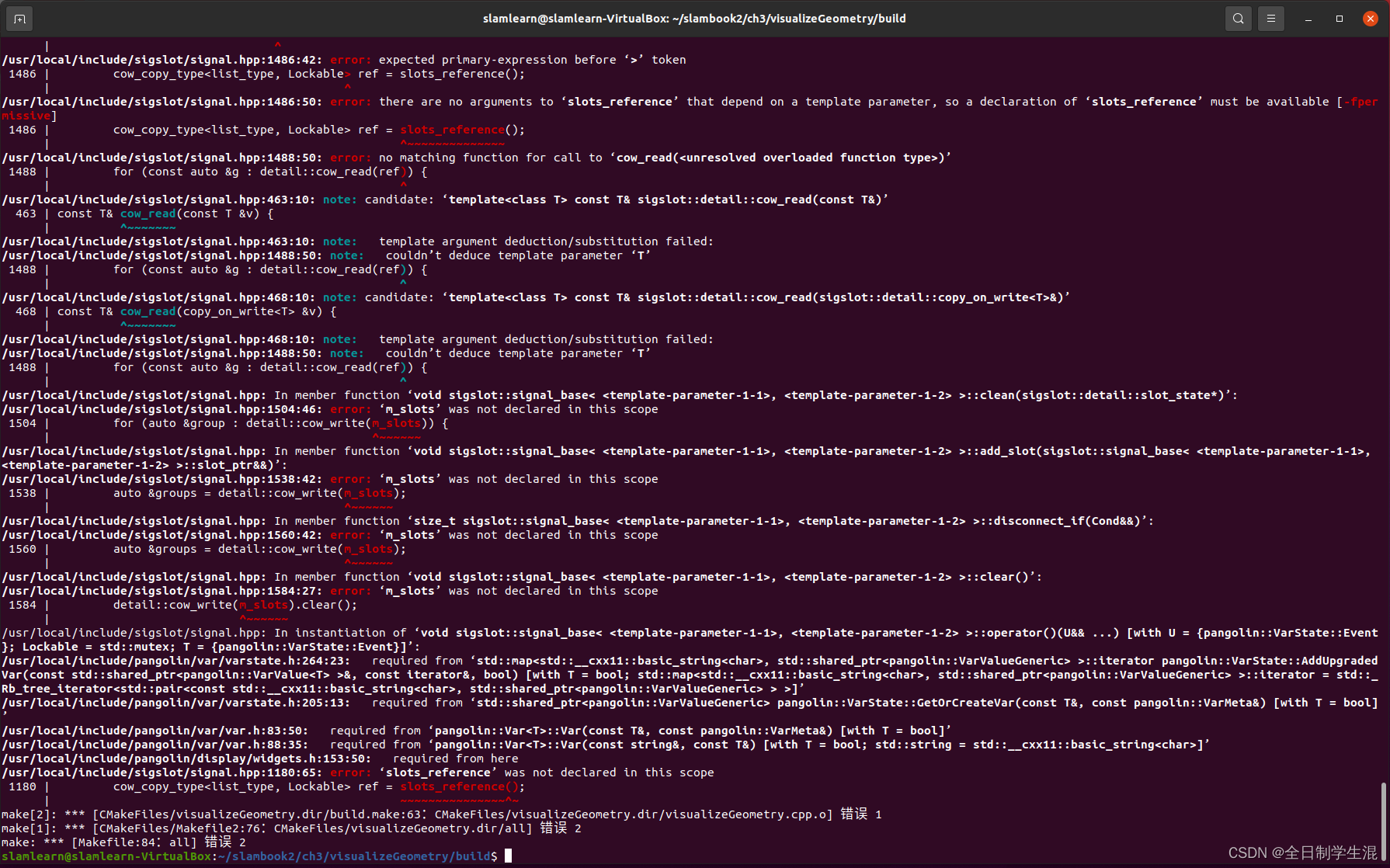
刚开始我还以为是我pangolin安装有问题,后来发现是这个demo中的CMakeLists.txt配置不适合本机Ubuntu20.04的环境(和C++编译器版本有关系)
只需要更改CMakeLists.txt中的一行代码即可解决!!!!如图:

把第4行注释掉,
# set(CMAKE_CXX_FLAGS "-std=c++11") # 注释掉这一行!!!即可顺利make,然后执行!
slamlearn@slamlearn-VirtualBox:~/slambook2/ch3/visualizeGeometry/build$ cmake ..
-- The C compiler identification is GNU 9.4.0
-- The CXX compiler identification is GNU 9.4.0
-- Check for working C compiler: /usr/bin/cc
-- Check for working C co 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









