



前言
当下科研领域正朝着高精度、高复杂度与高度智能化的方向迅猛发展。在微观生物实验、精细材料研究以及前沿的机器人与人工智能探索中,对实验工具的灵活性和精准力控能力提出了极高要求。
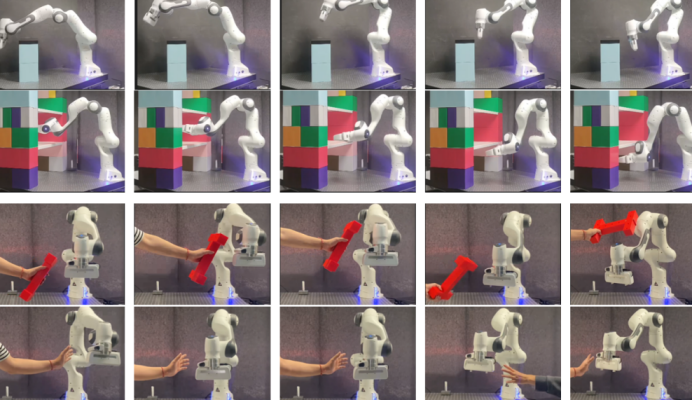
传统机械臂难以满足这些复杂需求,而 Franka Research 3 仿生力控机械臂凭借其性能优势,在全球科研机构和高校中逐渐普及,成为众多科研项目的关键设备。
Franka Research 3在科研领域的性能优势
Franka Research 3 的机器人系统包括手臂及其控制装置。
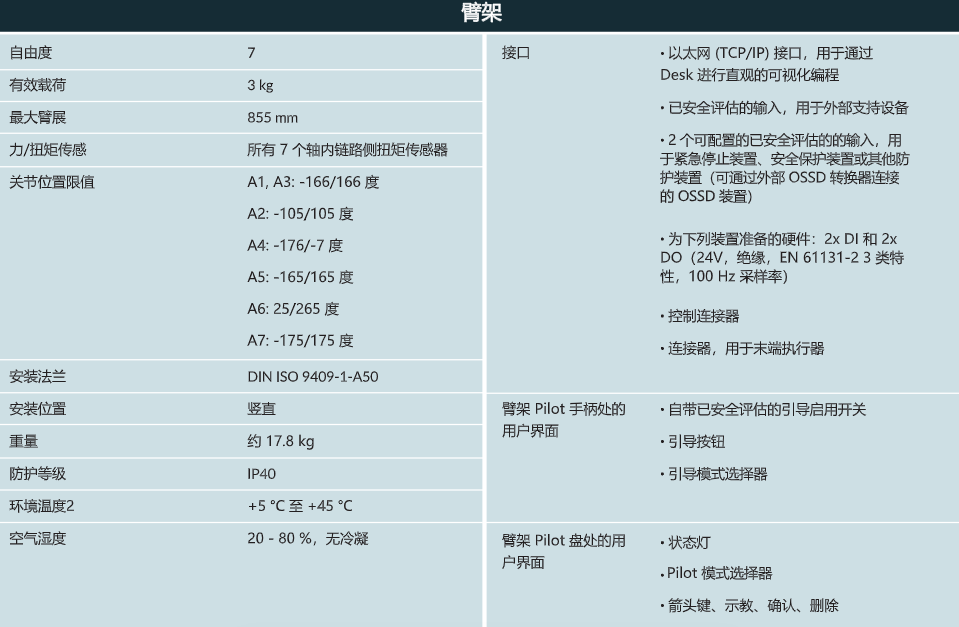
基础性能参数
-
有效载荷:3 kg,工作范围:855mm,工作空间覆盖范围:94.5%,工业级重复精度:±0.1 mm
-
力敏且敏捷的 Arm 具有 7 自由度
-
每个关节处都有扭矩传感器
科研优势
-
提供开放的 API 接口,支持快速部署与二次开发,极大降低了科研人员将其集成到现有实验系统中的门槛。
-
能与各类科研设备和软件无缝集成,实现数据实时共享与交互。
-
支持 ROS、Python、C++ 等多种编程语言与平台,方便科研人员开发复杂的 AI 算法。
科研应用案例分享
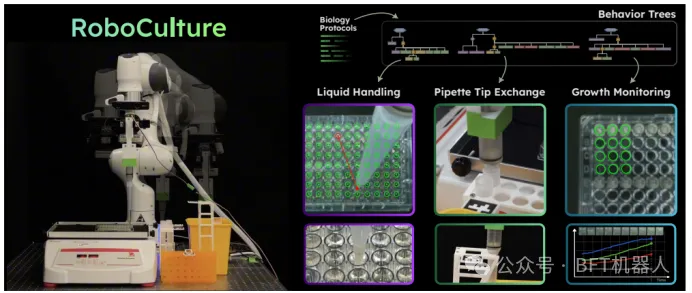
1、多伦多研究团队以Franka Research 3 机械臂为载体开发 RoboCulture 平台,实现了生物实验室关键任务的全面自动化。
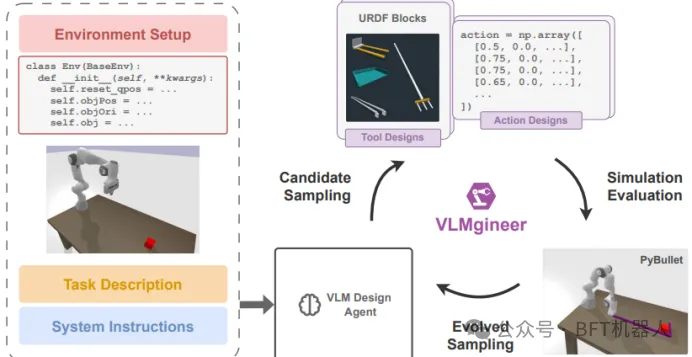
2、研究团队在VLMGINEER框架研究中以 Franka Research 3 为实验载体,使该框架优于人类提示设计及传统工具,能将复杂任务转化为简单执行。
3、艾伦人工智能研究所用Franka Research 3 机械臂验证 GraspMolmo 模型及 PRISM 数据集,实现机器人精准预测抓取方式且泛化能力突出。

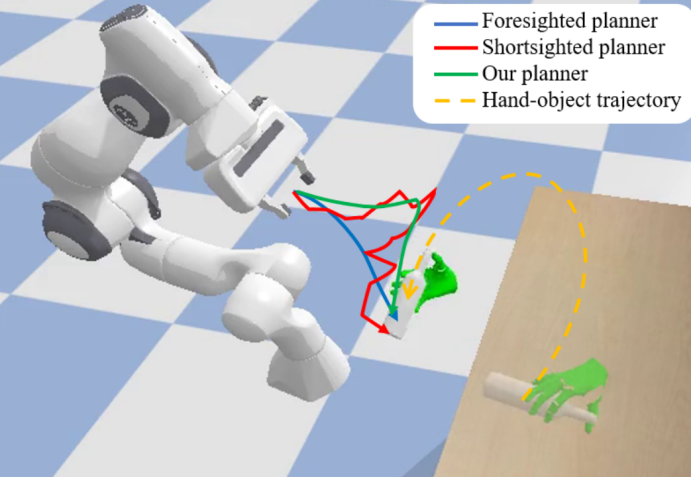
4、苏黎世联邦理工学院利用Franka 机器人开发智能任务规划系统,通过强化学习实现高效复杂组装任务,提高了复杂任务执行的准确性和效率。
5、香港科技大学基于Franka 机器人打造智能家居系统,使其能自主执行多种家庭任务,展示了服务机器人在家庭环境中的潜力。
6、清华大学自动化研究所利用Franka 机器人开发新型柔性制造系统,使其能自适应调整生产流程,提升了生产效率。
7、浙江大学研究团队以7轴 Franka Research 3机器人为载体,提出配置空间距离场方法,实现逆运动学单步梯度投影求解,并通过神经CDF提升计算效率。
结语
Franka 仿生力控机械臂以其精准的力控性能、灵活的操作能力和强大的适配性,成为连接理论创新与实践探索的关键纽带。
从复杂任务规划到人机交互研究,从工业自动化探索到生物实验室自动化突破,它始终是科研团队最得力的 “助手”,持续助力全球科研团队在智能机器人领域的事业发展。
公司介绍
显扬科技旗下BFT机器人平台是Franka机器人官方代理商,专注于为客户提供高精度协作机器人及行业解决方案。
显扬科技公司与Franka机器人公司凭借双方深度协作、互信共赢的卓越伙伴关系,荣获 Franka 机器人授予的 “战略合作伙伴奖”。

核心优势
-
资深工程师团队,具备多领域机器人系统开发经验;
-
国内外顶尖机器人品牌资源整合能力;
-
自主研发的机器视觉与灵巧手技术;
-
全天候高效服务支持体系。

















 1469
1469

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









