



用 navigation 包,让机器人自己找路不撞墙 🚀
跟 MoveIt 搭配绝了:导航管走,MoveIt 管伸手,双臂机器人也能“边走边干”!
ROS 1 用 navigation,ROS 2 别忘了升级到 nav2~
一、下载对应文件包
sudo apt update
#navigation官方包
sudo apt install ros-noetic-navigation
#TurtleBot3 仿真环境的安装和配置
sudo apt install ros-noetic-turtlebot3 ros-noetic-turtlebot3-simulations ros-noetic-gazebo-ros-pkgs ros-noetic-gazebo-ros-control
#设置环境变量
gedit ~/.bashrc
export TURTLEBOT3_MODEL=burger
#是环境变量生效
source ~/.bashrc
#下载建图程序
sudo apt install ros-noetic-slam-gmapping
# 安装键盘控制包
sudo apt install ros-noetic-teleop-twist-keyboard
二、建图
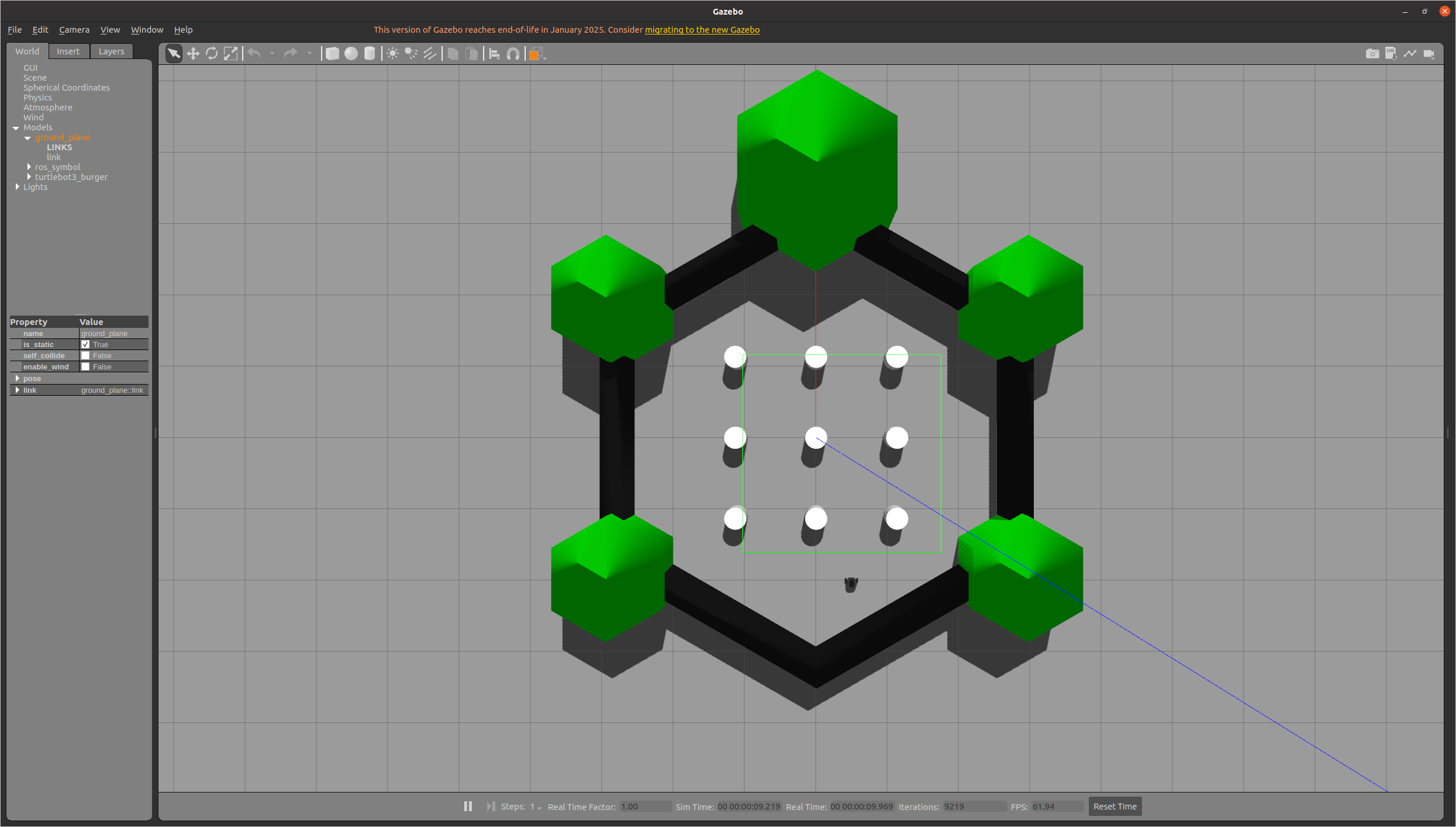
#打开仿真环境
roslaunch turtlebot3_gazebo turtlebot3_world.launch
#另一个终端,启动建图程序
roslaunch turtlebot3_slam turtlebot3_slam.launch slam_methods:=gmapping
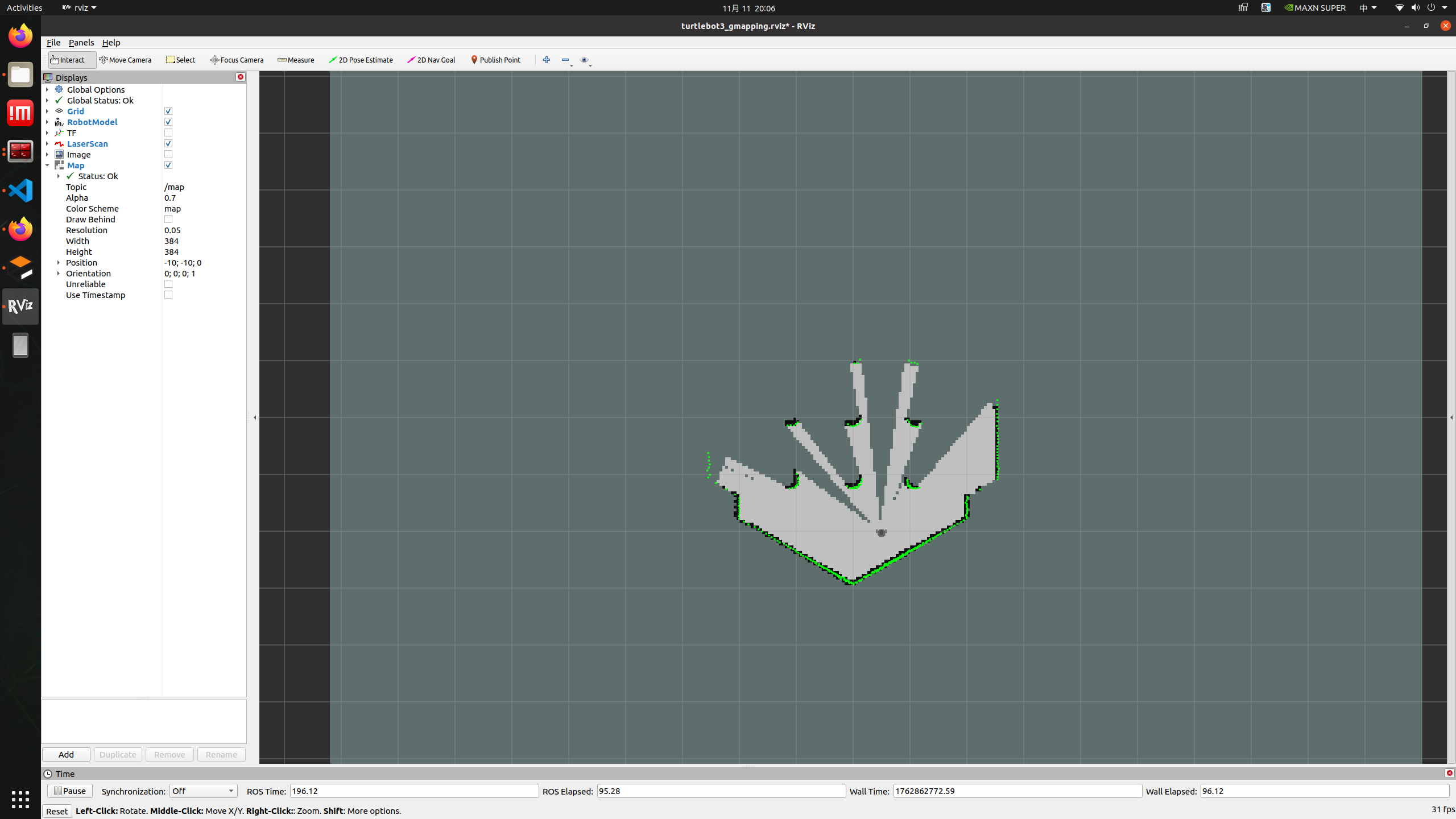
#使用键盘控制机器人,扫描仿真环境
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
然后,转一圈,再保存其对应的生成地图。会生成一个my_map.pgm和一个my_map.yaml
rosrun map_server map_saver -f ~/my_map
三、启动导航
#重新加载仿真的环境
roslaunch turtlebot3_gazebo turtlebot3_world.launch
#加载navigation导航栈
roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=$HOME/my_map.yaml
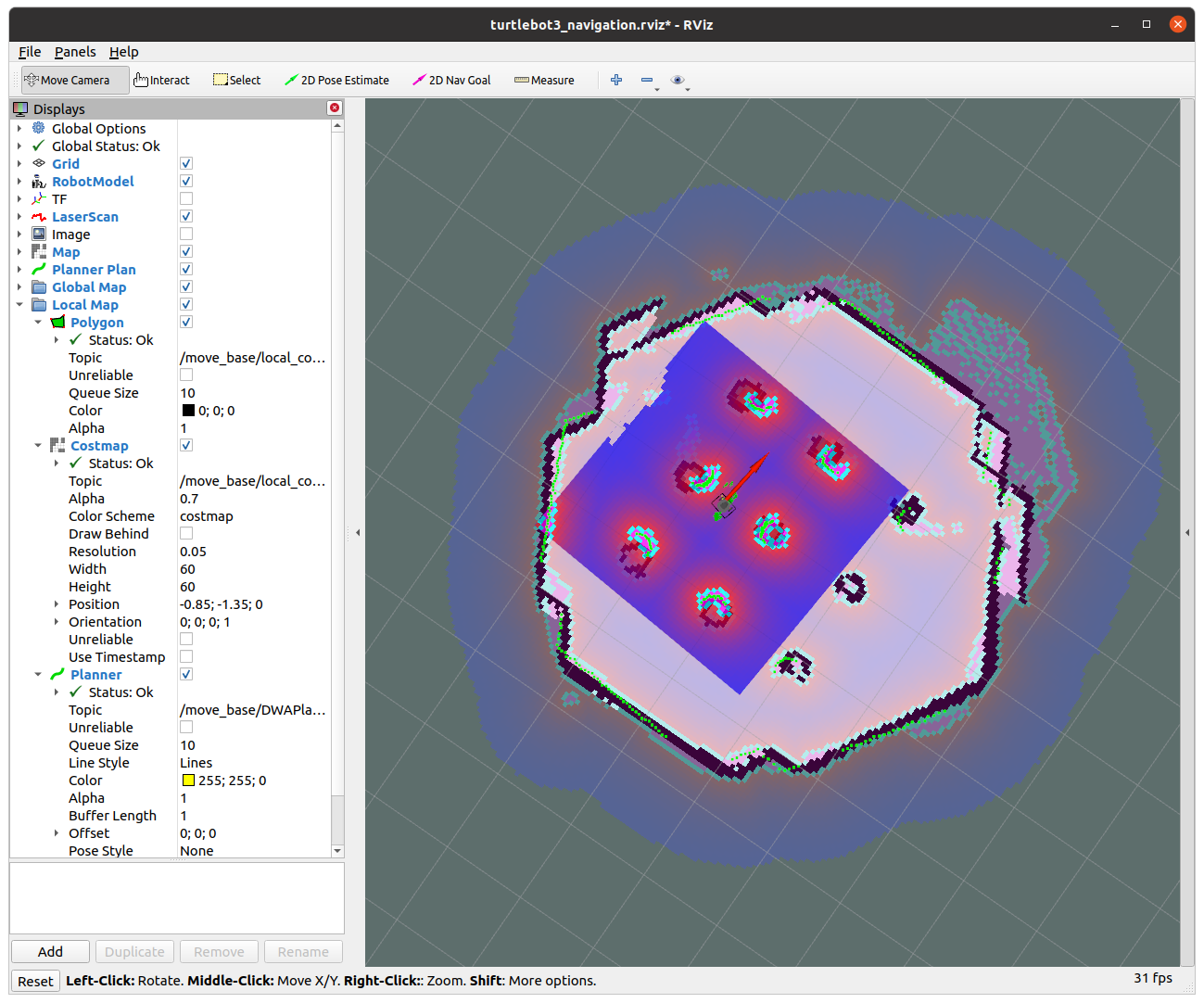
ok,设定目标点位,导航成功。

















 1735
1735

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









