







 超级会员免费看
超级会员免费看
 本文介绍了如何利用Open3D库进行点云处理,特别是包围盒的计算,包括轴对齐包围盒(AABB)和有向包围盒(OBB)。AABB通过坐标最大值和最小值快速计算,但存在空间冗余;而OBB通过PCA获取最佳坐标轴,虽计算复杂但更准确地表达物体位姿。
本文介绍了如何利用Open3D库进行点云处理,特别是包围盒的计算,包括轴对齐包围盒(AABB)和有向包围盒(OBB)。AABB通过坐标最大值和最小值快速计算,但存在空间冗余;而OBB通过PCA获取最佳坐标轴,虽计算复杂但更准确地表达物体位姿。
包围盒是一个简单的几何空间,里面包含着复杂形状的物体。为物体添加包围体的目的是快速的进行碰撞检测或者进行精确的碰撞检测之前进行过滤(即当包围体碰撞,才进行精确碰撞检测和处理)。
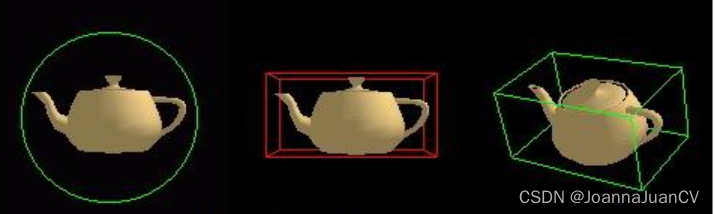
包围体类型包括球体、轴对齐包围盒(AABB)、有向包围盒(OBB)、8-DOP以及凸壳;
- 球体包围盒:至少使用三个点来确定外接圆(球);
- AABB包围盒:取坐标最大值和最小值计算简单,但空间有冗余不能较好的表达物体的真实位姿;
get_axis_aligned_bounding_box
- OBB包围盒:先进行PCA,取得投影方差最大的方向作为坐标轴方向计算较复杂,但空间不存在冗余,也最常用;
get_oriented_bounding_box
import open3d as o3d
import numpy as np
pcd 
 订阅专栏 解锁全文
订阅专栏 解锁全文



















 36万+
36万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











