








 超级会员免费看
超级会员免费看

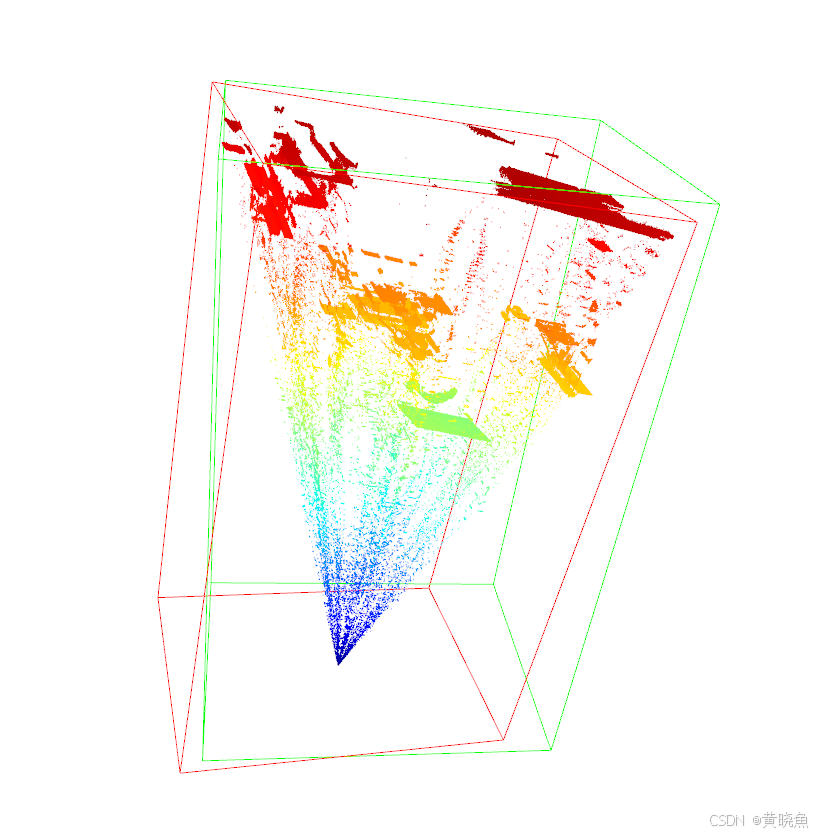
测试效果
废话
Open3D是一个开源库,专门用于处理和分析三维数据,包括点云数据。在Open3D中,点云的外包围框(Bounding Box)是一个非常重要的概念,它用于表示能够完全包围点云的最小立方体或长方体,提供了关于点云尺寸、位置和方向的重要信息。以下是关于Open3D中点云外包围框的详细解释和操作方法:
一、外包围框的类型
在Open3D中,常见的点云外包围框主要有两种类型:
- Axis-Aligned Bounding Box (AABB):轴对齐包围盒,其边界与坐标轴平行。AABB计算简单,但可能无法紧密贴合点云的形状,因为它不随点云的方向而改变。
- Oriented Bounding Box (OBB):方向包围盒,可以根据点云的方向进行旋转,以更紧密地贴合点云的形状。OBB的计算相对复杂,但能够提供更准确的边界信息。
二、计算外包围框
在Open3D中,可以通过调用点云对象的get_axis_aligned_bounding_box()方法来获取AABB包围盒,通过get_oriented_bounding_box()方法来获取OBB包围盒。
三、外包围框的应用
点云的外包围框在多个领域都有广泛的应用,包括但不限于:
- 碰撞检测:在机器人导航、游戏开发等领域,通过计算物体的外

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 36万+
36万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











