







 超级会员免费看
超级会员免费看
 本文介绍了在尝试使用fast-lio2驱动livox-mid360时遇到的问题,包括不同SDK版本的消息类型差异。尽管理论上不匹配,但未经修改的代码也能运行。为了解决local_position/pose丢失的问题,需要更新应用程序的依赖、头文件和数据类型。具体步骤包括修改CMakelists.txt、package.xml、头文件引用以及命名空间。通过这些修改,fast-lio2将能适应livox-mid360。
本文介绍了在尝试使用fast-lio2驱动livox-mid360时遇到的问题,包括不同SDK版本的消息类型差异。尽管理论上不匹配,但未经修改的代码也能运行。为了解决local_position/pose丢失的问题,需要更新应用程序的依赖、头文件和数据类型。具体步骤包括修改CMakelists.txt、package.xml、头文件引用以及命名空间。通过这些修改,fast-lio2将能适应livox-mid360。
fast-lio2开源代码使用的是livox-mid70,数据结构是一代livox-sdk ,想要驱动mid360使用的却是livox-sdk2,消息类型有区别,但是不做代码修改,直接编译后也能运行(没有弄明白原理,消息类型不同理论上是订阅不了话题的)。 最近使用fast-lio给px4供位置信息总会出现local_position/pose丢失的问题,怀疑是livox-sdk 和livox-sdk2消息类型不同造成的
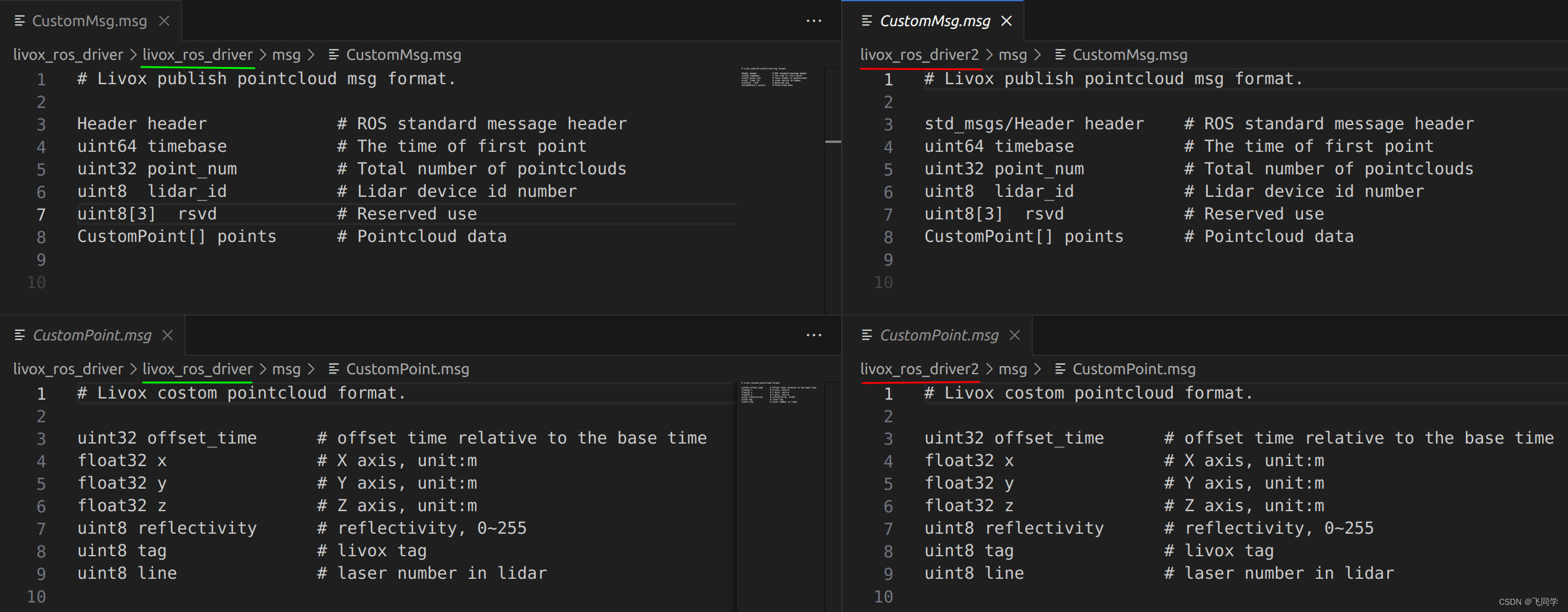
两个版本驱动的 “Livox customized pointcloud format” 的格式一样的。 可知只需修改应用程序的依赖、头文件、数据类型就可以了. “livox_ros_driver” 全替换为 “livox_ros_driver2” 就行
| 参数名 | 详细说明 | 默认值 |
|---|---|---|
| publish_freq | 设置点云发布频率 浮点数据类型,推荐值 5.0,10.0,20.0,50.0 等。 |
10.0 |
| multi_topic | LiDAR 设备是否拥有独立的 topic 发布点云数据 0 – 所有 LiDAR 设备共同使用同一个 topic 发送点云数据 1 – 每个 LiDAR |

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 5023
5023

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











