







 本文介绍了URDF(通用机器人描述格式)的基本组成部分,包括语言格式、基本属性如link和joint,以及如何使用check_urdf和urdf_to_graphiz工具进行语法检查和模型可视化。了解这些内容对于构建和理解机器人模型至关重要。
本文介绍了URDF(通用机器人描述格式)的基本组成部分,包括语言格式、基本属性如link和joint,以及如何使用check_urdf和urdf_to_graphiz工具进行语法检查和模型可视化。了解这些内容对于构建和理解机器人模型至关重要。
《一》语言格式
1 <robot name="pr2">
2 <!-- pr2 robot links and joints and more -->
3 </robot>
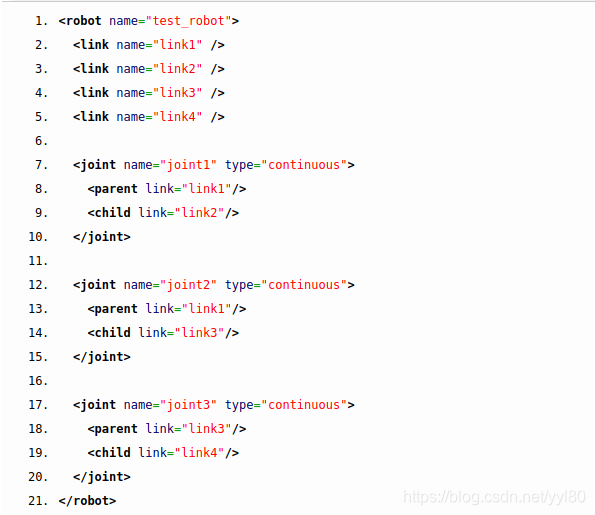
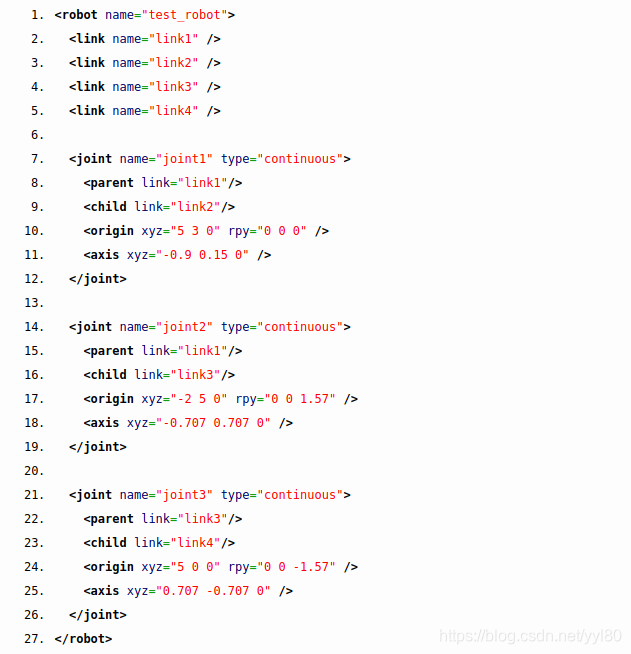
 来源:http://www.guyuehome.com/372的例子如下:
来源:http://www.guyuehome.com/372的例子如下:
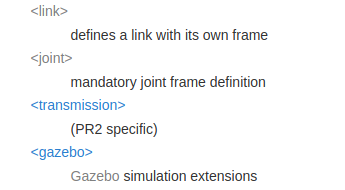
《二》基本属性
link、joint、origin(大小)、axis等
《三》基本工具
(1)检查URDF语法的工具:check_urdf
下载:sudo apt-get install liburdfdom-tools
检查:在urdf文件的目录:check_urdf 文件名.urdf
(2)可视化模型:urdf_to_graphiz 文件名.urdf

















 271
271

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









