







 这篇博客详细介绍了如何配置MoveIt与Gazebo的集成,涉及修改ros_controllers.yaml、moveit_config的launch文件、创建控制器管理器启动文件以及设置新的功能包。步骤包括调整机器人控制器参数、加载控制器到参数服务器、启动模拟环境、发布机器人状态并启动MoveIt节点。通过这个过程,可以为其他机械臂在MoveIt和Gazebo的联动提供参考。
这篇博客详细介绍了如何配置MoveIt与Gazebo的集成,涉及修改ros_controllers.yaml、moveit_config的launch文件、创建控制器管理器启动文件以及设置新的功能包。步骤包括调整机器人控制器参数、加载控制器到参数服务器、启动模拟环境、发布机器人状态并启动MoveIt节点。通过这个过程,可以为其他机械臂在MoveIt和Gazebo的联动提供参考。
1、修改XXX.moveit_config/config/ros_controllers.yaml
# MoveIt-specific simulation settings
moveit_sim_hw_interface:
joint_model_group: controllers_initial_group_
joint_model_group_pose: controllers_initial_pose_
# Settings for ros_control control loop
generic_hw_control_loop:
loop_hz: 300
cycle_time_error_threshold: 0.01
# Settings for ros_control hardware interface
hardware_interface:
joints:
- magician_joint1
- magician_joint2
- magician_joint3
sim_control_mode: 1 # 0: position, 1: velocity
# Publish all joint states
# Creates the /joint_states topic necessary in ROS
joint_state_controller:
type: joint_state_controller/JointStateController
publish_rate: 50
controller_list:
- name: magician_arm_controller
action_ns: follow_joint_trajectory
default: True
type: FollowJointTrajectory
joints:
- magician_joint1
- magician_joint2
- magician_joint32、修改XXX.moveit_config/launch/ros_controllers.yaml
<?xml version="1.0"?>
<launch>
<!-- Load joint controller configurations from YAML file to parameter server -->
<rosparam file="$(find magician_moveit_config)/config/ros_controllers.yaml" command="load"/>
<!-- Load the controllers -->
<node name="controller_spawner" pkg="controller_manager" type="spawner" respawn="false"
output="screen" args=""/>
</launch>
3、修改XXX.moveit_config/launch/moveit_rviz.launch
<launch>
<arg name="debug" default="false" />
<arg unless="$(arg debug)" name="launch_prefix" value="" />
<arg if="$(arg debug)" name="launch_prefix" value="gdb --ex run --args" />
<arg name="config" default="false" />
<arg unless="$(arg config)" name="command_args" value="" />
<arg if="$(arg config)" name="command_args" value="-d $(find magician_moveit_config)/launch/moveit.rviz" />
<node name="$(anon rviz)" launch-prefix="$(arg launch_prefix)" pkg="rviz" type="rviz" respawn="false"
args="$(arg command_args)" output="screen">
<rosparam command="load" file="$(find magician_moveit_config)/config/kinematics.yaml"/>
</node>
</launch>
4、在XXX.moveit_config/launch/move_group.launch修改一点小细节
<launch>
<include file="$(find magician_moveit_config)/launch/planning_context.launch" />
<!-- GDB Debug Option -->
<arg name="debug" default="false" />
<arg unless="$(arg debug)" name="launch_prefix" value="" />
<arg if="$(arg debug)" name="launch_prefix"
value="gdb -x $(find magician_moveit_config)/launch/gdb_settings.gdb --ex run --args" />
<!-- Verbose Mode Option -->
<arg name="info" default="$(arg debug)" />
<arg unless="$(arg info)" name="command_args" value="" />
<arg if="$(arg info)" name="command_args" value="--debug" />
<!-- move_group settings -->
<arg name="allow_trajectory_execution" default="true"/>
<arg name="fake_execution" default="false"/>
<arg name="max_safe_path_cost" default="1"/>
<arg name="jiggle_fraction" default="0.05" />
<arg name="publish_monitored_planning_scene" default="true"/>
<arg name="capabilities" default=""/>
<arg name="disable_capabilities" default=""/>
<!-- load these non-default MoveGroup capabilities (space seperated) -->
<!--
<arg name="capabilities" value="
a_package/AwsomeMotionPlanningCapability
another_package/GraspPlanningPipeline
" />
-->
<!-- inhibit these default MoveGroup capabilities (space seperated) -->
<!--
<arg name="disable_capabilities" value="
move_group/MoveGroupKinematicsService
move_group/ClearOctomapService
" />
-->
<!-- Planning Functionality -->
<include ns="move_group" file="$(find magician_moveit_config)/launch/planning_pipeline.launch.xml">
<arg name="pipeline" value="ompl" />
</include>
<!-- Trajectory Execution Functionality -->
<include ns="move_group" file="$(find magician_moveit_config)/launch/trajectory_execution.launch.xml" if="$(arg allow_trajectory_execution)">
<arg name="moveit_manage_controllers" value="true" />
<arg name="moveit_controller_manager" value="magician" unless="$(arg fake_execution)"/>
<arg name="moveit_controller_manager" value="fake" if="$(arg fake_execution)"/>
</include>
<!-- Sensors Functionality -->
<include ns="move_group" file="$(find magician_moveit_config)/launch/sensor_manager.launch.xml" if="$(arg allow_trajectory_execution)">
<arg name="moveit_sensor_manager" value="magician" />
</include>
<!-- Start the actual move_group node/action server -->
<node name="move_group" launch-prefix="$(arg launch_prefix)" pkg="moveit_ros_move_group" type="move_group" respawn="false" output="screen" args="$(arg command_args)">
<!-- Set the display variable, in case OpenGL code is used internally -->
<env name="DISPLAY" value="$(optenv DISPLAY :0)" />
<param name="allow_trajectory_execution" value="$(arg allow_trajectory_execution)"/>
<param name="max_safe_path_cost" value="$(arg max_safe_path_cost)"/>
<param name="jiggle_fraction" value="$(arg jiggle_fraction)" />
<param name="capabilities" value="$(arg capabilities)"/>
<param name="disable_capabilities" value="$(arg disable_capabilities)"/>
<!-- Publish the planning scene of the physical robot so that rviz plugin can know actual robot -->
<param name="planning_scene_monitor/publish_planning_scene" value="$(arg publish_monitored_planning_scene)" />
<param name="planning_scene_monitor/publish_geometry_updates" value="$(arg publish_monitored_planning_scene)" />
<param name="planning_scene_monitor/publish_state_updates" value="$(arg publish_monitored_planning_scene)" />
<param name="planning_scene_monitor/publish_transforms_updates" value="$(arg publish_monitored_planning_scene)" />
</node>
</launch>
5、修改trajectory_execution.launch.xml
<launch>
<!-- This file makes it easy to include the settings for trajectory execution -->
<!-- Flag indicating whether MoveIt! is allowed to load/unload or switch controllers -->
<arg name="moveit_manage_controllers" default="true"/>
<param name="moveit_manage_controllers" value="$(arg moveit_manage_controllers)"/>
<!-- When determining the expected duration of a trajectory, this multiplicative factor is applied to get the allowed duration of execution -->
<param name="trajectory_execution/allowed_execution_duration_scaling" value="2"/> <!-- default 1.2 -->
<!-- Allow more than the expected execution time before triggering a trajectory cancel (applied after scaling) -->
<param name="trajectory_execution/allowed_goal_duration_margin" value="0.5"/> <!-- default 0.5 -->
<!-- Allowed joint-value tolerance for validation that trajectory's first point matches current robot state -->
<param name="trajectory_execution/allowed_start_tolerance" value="0.01"/> <!-- default 0.01 -->
<!-- Load the robot specific controller manager; this sets the moveit_controller_manager ROS parameter -->
<arg name="moveit_controller_manager" default="magician" />
<include file="$(find magician_moveit_config)/launch/$(arg moveit_controller_manager)_moveit_controller_manager.launch.xml" />
</launch>
6、创建magician_moveit_controller_manager.launch.xml文件,并且启动ros_controllers.yaml
<launch>
<!-- loads moveit_controller_manager on the parameter server which is taken as argument
if no argument is passed, moveit_simple_controller_manager will be set -->
<arg name="moveit_controller_manager" default="moveit_simple_controller_manager/MoveItSimpleControllerManager" />
<param name="moveit_controller_manager" value="$(arg moveit_controller_manager)"/>
<!-- loads ros_controllers to the param server -->
<rosparam file="$(find magician_moveit_config)/config/ros_controllers.yaml"/>
</launch>
7、新建一个功能包,里面放置启动文件
<?xml version="1.0"?>
<launch>
<arg name="paused" default="true"/>
<arg name="gazebo_gui" default="true"/>
<arg name="urdf_path" default="$(find magician_description)/urdf/magician.urdf.xacro"/>
<!-- startup simulated world -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" default="worlds/empty.world"/>
<arg name="paused" value="$(arg paused)"/>
<arg name="gui" value="$(arg gazebo_gui)"/>
</include>
<!-- send robot urdf to param server -->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find magician_description)/urdf/magician.urdf.xacro'" />
<!-- push robot_description to factory and spawn robot in gazebo at the origin, change x,y,z arguments to spawn in a different position -->
<node name="spawn_model" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model magician
-param robot_description
-x 0
-y 0
-z 0.14
-J magician_joint1 0
-J magician_joint2 0.785
-J magician_joint3 0.785
-unpause"/>
<rosparam file="$(find magician_description)/config/joint_state_controller.yaml" command="load"/>
<node name="joint_state_controller_spawner" pkg="controller_manager" type="controller_manager" args="spawn joint_state_controller" respawn="false" output="screen"/>
<rosparam file="$(find magician_description)/config/magician_arm_controller.yaml" command="load"/>
<node name="elfin_arm_controller_spawner" pkg="controller_manager" type="controller_manager" args="spawn magician_arm_controller" respawn="false" output="screen"/>
<!-- # The planning and execution components of MoveIt! configured to
# publish the current configuration of the robot (simulated or real)
# and the current state of the world as seen by the planner
-->
<include file="$(find magician_moveit_config)/launch/move_group.launch">
<arg name="publish_monitored_planning_scene" value="true" />
</include>
<!-- # The visualization component of MoveIt! -->
<arg name="display" default="true"/>
<include file="$(find magician_moveit_config)/launch/moveit_rviz.launch" if="$(arg display)">
<arg name="config" value="true"/>
</include>
</launch>
最后编译一下,启动launch文件。
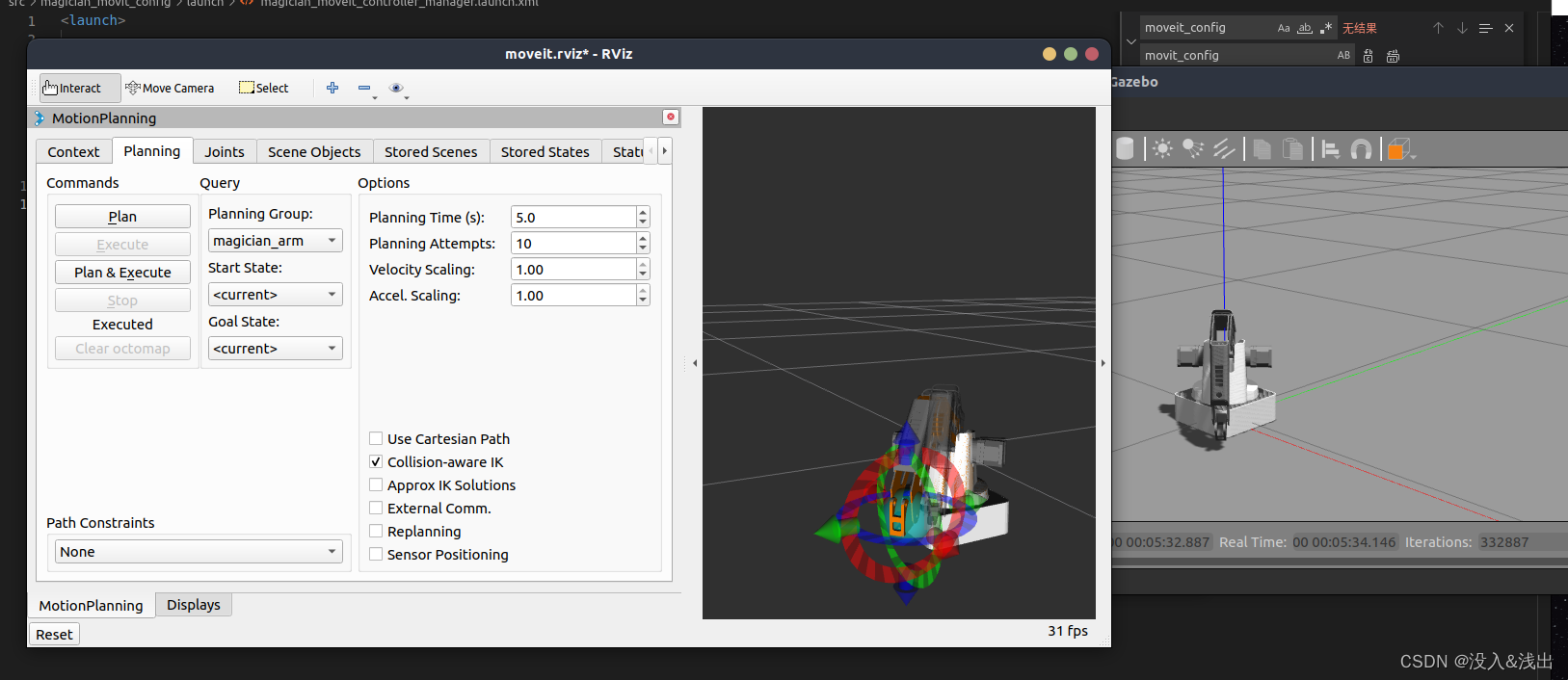
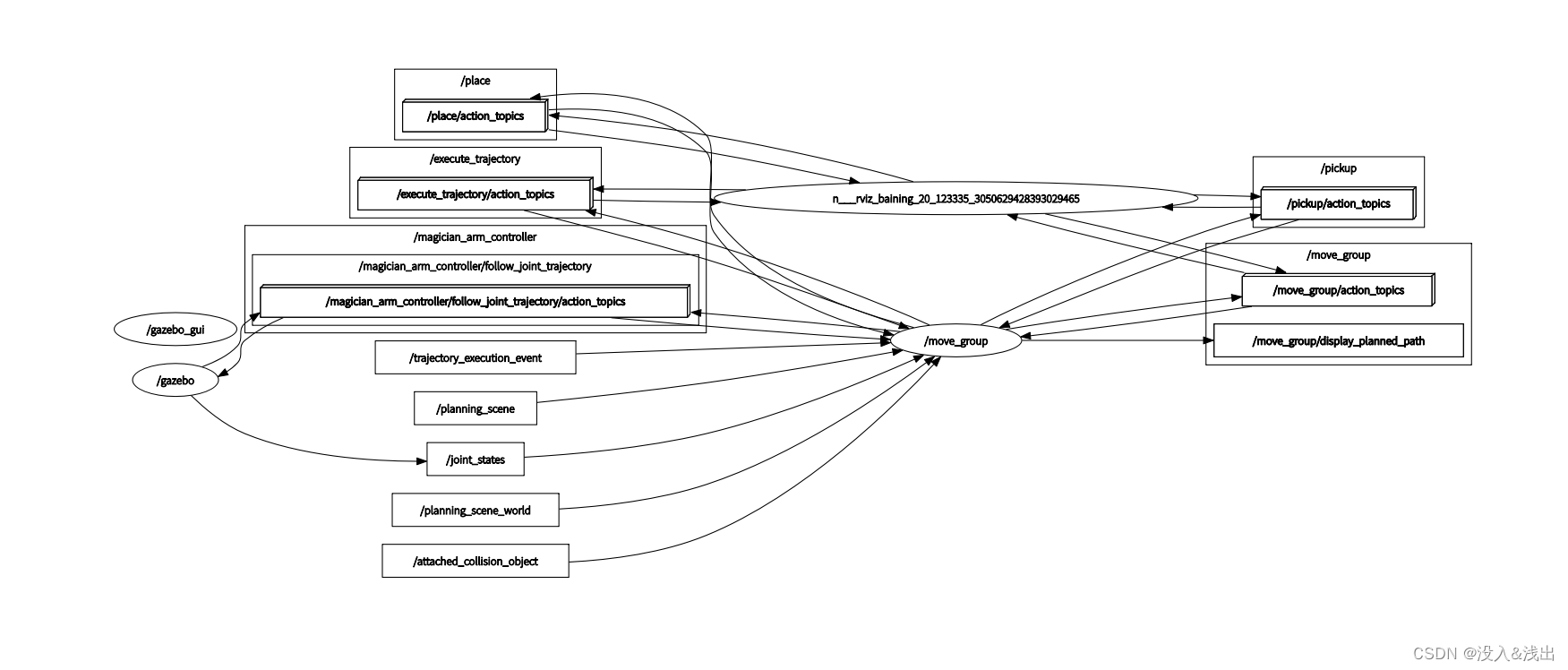
到这里moveit和gazebo的联动到此结束。
我们通过以上部分举一反三,其他的机械臂在moveit和gazebo联动时也是这样配置的。


















 1947
1947

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











