



前言
笔者水平有限,有错漏之处还望指出,不胜感激!
参考视频:卫星导航定位原理与应用_中国大学MOOC(慕课)![]() https://www.icourse163.org/learn/SEU-1449624174?tid=1473187448#/learn/content?type=detail&id=1260228084&cid=1296304241&contentid=1220032219卫星导航系统_中国大学MOOC(慕课)
https://www.icourse163.org/learn/SEU-1449624174?tid=1473187448#/learn/content?type=detail&id=1260228084&cid=1296304241&contentid=1220032219卫星导航系统_中国大学MOOC(慕课)![]() https://www.icourse163.org/learn/HRBEU-1207123826?tid=1473239462#/learn/content?type=detail&id=1260473592&cid=1296834056&contentid=480000001473950
https://www.icourse163.org/learn/HRBEU-1207123826?tid=1473239462#/learn/content?type=detail&id=1260473592&cid=1296834056&contentid=480000001473950
基线方程的推导
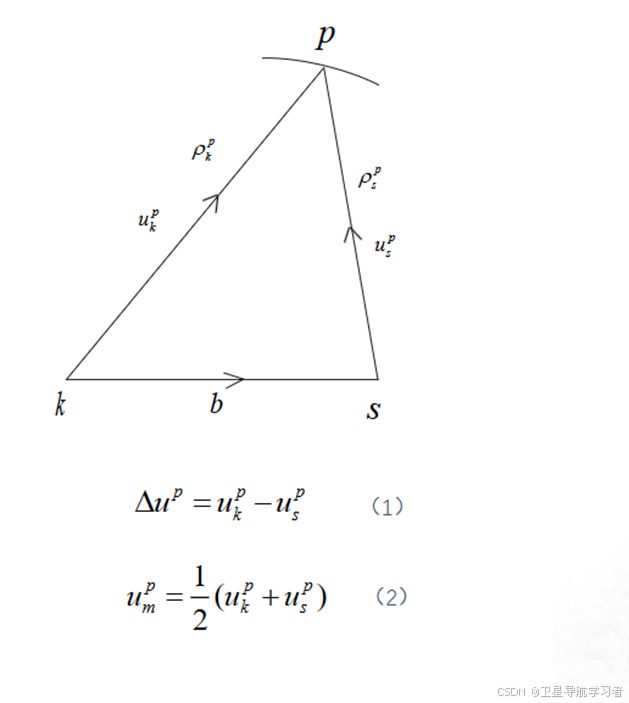
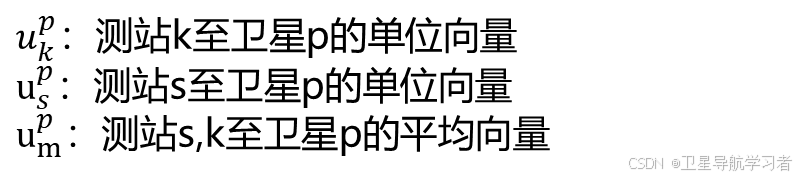
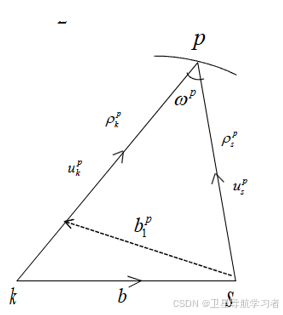
如上图所示,两个测站k,s分别观测卫星p,为测站k至卫星p的星地距离,
为测站k至卫星p的星地距离.
做辅助线,使得右上角三角形为等腰三角形,如下图:
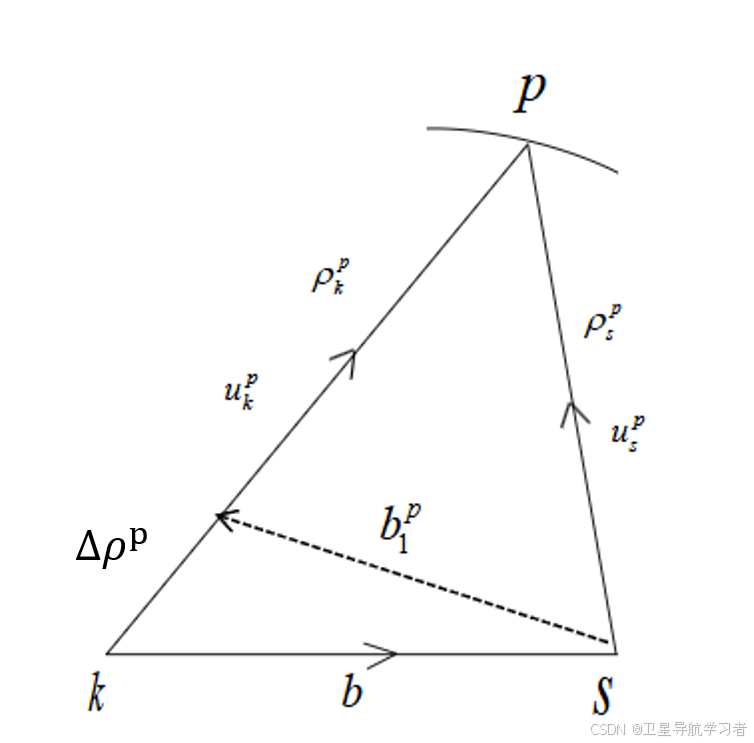
因为为等腰三角形,所以:
 (3)
(3)
且:
 (4)
(4)
辅助线通过向量kp与sp相减可得:
 (5)
(5)
将式(4)代入:
 (6)
(6)
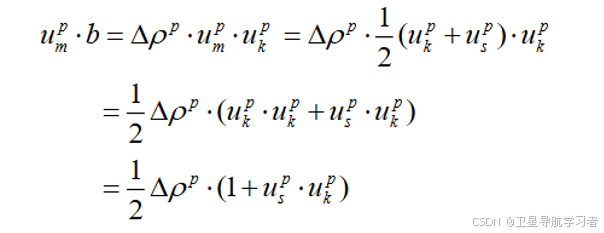
将上式两端同×(也就是平均向量):
 (7)
(7)
对上式进行化简,截取其中部分式子如下:
·  (8)
(8)
将上式代入式(7)中,得到:
 (9)
(9)
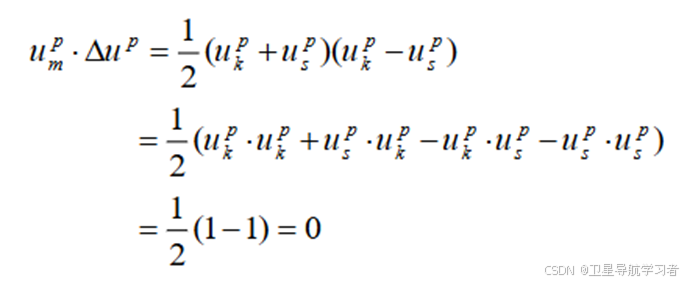
将表达式代入左侧,得到:
 (10)
(10)
而,
两向量点乘,我们引入顶角角度
:
根据向量点乘法则:
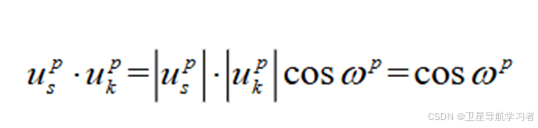 (11)
(11)
将式(11)代入式(10),可得:
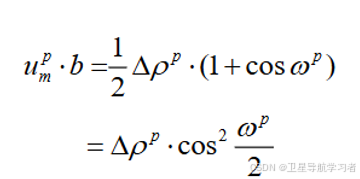 (12)
(12)
对上式进行变形,可以得到:
 (13)
(13)
同理,对于卫星q,可以得到:
 (14)
(14)
回顾双差载波方程:
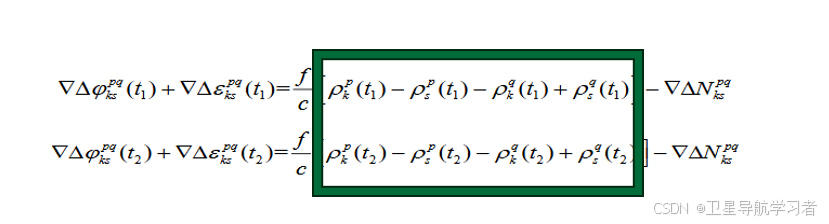 (15)
(15)
可以发现上述两项即为不同接收机对于卫星的星地距离差值,因此我们进行代入:
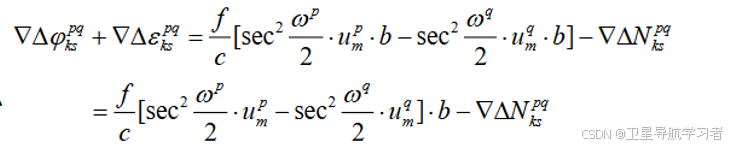 (16)
(16)
当基线长度小于40km时,,因此:
 (17)
(17)
代入式(16):
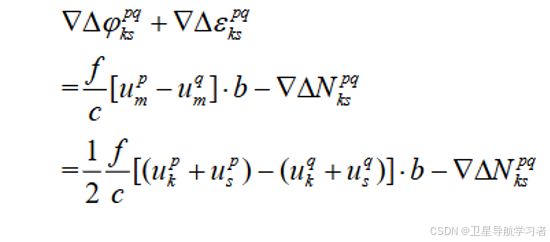 (18)
(18)
将单位向量,
等用卫星和接收机相对坐标增量,这里可以用测站近似坐标和卫星坐标进行表示即可,同时将距离b用两个接收机之间距离差表示:
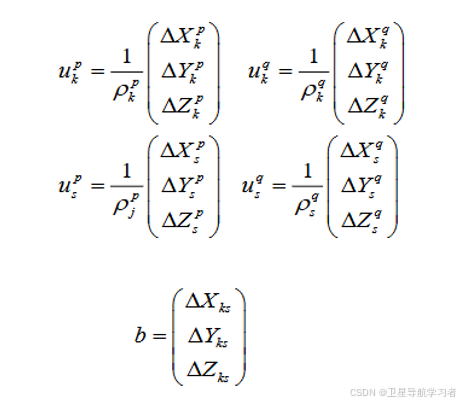 (19)
(19)
将上式代入式(18),得出基线方程:
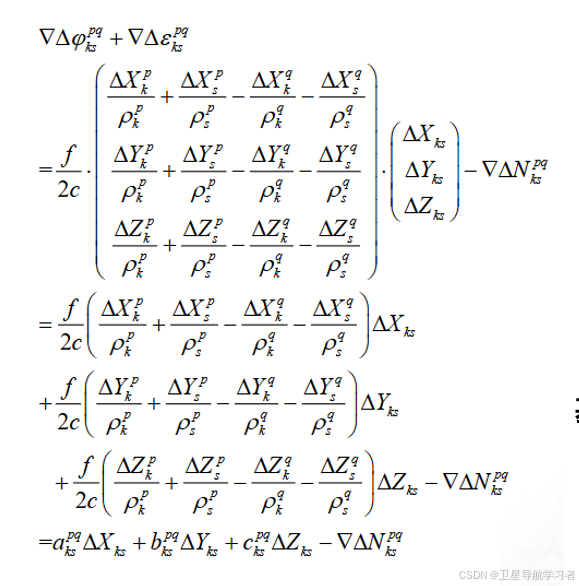 (20)
(20)
基线方程的解算:
为了进行方程的解算,需要将其化为误差方程的形式,且其变量应为实际坐标差的变化值:
 (21)
(21)
将上式化为变化值:
![]() (22)
(22)
式中:

不妨对式(22)进行观察,可以发现其含有4个未知数,分别为:![]() ,
,![]() ,
, 三个基线向量坐标增量,和一个双差模糊度
三个基线向量坐标增量,和一个双差模糊度![]() 。
。
如果以某一个卫星作为参考卫星,某一历元在测站i和测站j上,同时观测了S个卫星,则可列出(S-1)个形如式(22)的误差方程,相应地要引入(S-1)个双差模糊度未知数,再考虑到有3个基线向量未知数,则该历元共有s+2个未知数,未知数个数大于方程数,此时,误差方程组不可解,
若测站i和测站i对所有S个卫星进行连续观测,随着历元数的增加,误差方程数也在增加,但未知数没有变。假设观测了n个历元,则总共有n*(s-1)个误差方程方程数大于未知数个数,进而实现了误差方程组可解。
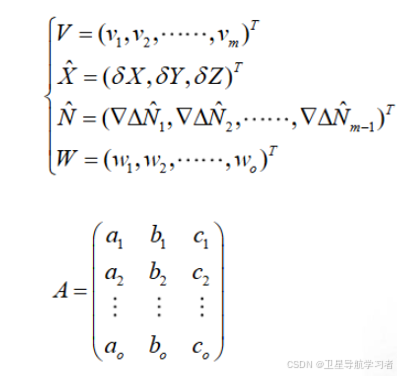
对m个卫星进行多历元观测:
 (23)
(23)
式中:
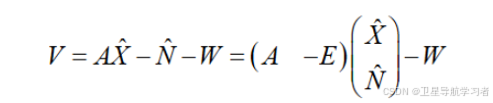
根据最小二乘法,已知观测值的方差矩阵D的条件下进行未知数的求解:
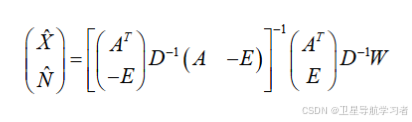 (24)
(24)


















 7016
7016

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











