






前言
最近在研究卡尔曼滤波,发现网上关于利用卡尔曼滤波做5G和GNSS融合的帖子较少,因此手搓了一个简易的仿真代码,主要用于学习卡尔曼滤波并进行简单的5G+GNSS融合处理,其中仿真设置较为理想化,有错漏之处还请多多包含。
卡尔曼滤波
作为非常经典和常用的方法,具体原理网上教程也很多,就不赘述了,下面将几个主要公式和含义进行介绍,以方便对代码进行对应。
状态方程:
![]()
其中,x为状态变量,x=[ x y z Vx Vy Vz]T,其中x y z为三维坐标,Vx Vy Vz为三维速度。xk是目标在时间k的状态向量,Fk是状态转移矩阵,Gk是控制输入矩阵,uk是控制输入向量,wk是过程噪声。
观测方程可以表示为:
![]()
其中,zk是观测向量(GNSS和5G的定位数据,包含位置信息);Hk是观测矩阵,将状态向量映射到观测空间,vk是观测噪声。
卡尔曼滤波的迭代过程包括预测和更新两个步骤,其中预测步骤是通过状态方程预测下一个时间点的状态:
![]()
计算预测误差协方差:
![]()
更新步骤是通过预测数据更新状态估计:
![]()
更新状态估计:
![]()
其中,Qk是过程噪声协方差矩阵,Rk是观测噪声协方差矩阵,Kk是卡尔曼增益。
先给出总的参数设置,后面也会讲到,设置uk=0,P0 =100I6,Qk=0.01I6,Rk=29I3,Hk= [I3 03],Fk=[I3,I3;03,I3]。
仿真设置
轨迹生成
clc;
clear;
close all;
%% 模拟参数
num_steps = 100; % 仿真步数
dt = 1; % 时间间隔(秒)
true_pos = [linspace(0, 100, num_steps); % X坐标从0到100米
linspace(0, 50, num_steps); % Y坐标从0到50米
linspace(0, 100, num_steps)]; % Z坐标从0到100米
这里给出了真实轨迹的生成方式,主要采取了线性化取点的方式,轨迹设置比较简单,有其他需要的可以采用更为复杂的取点方式,轨迹生成图如下:
5G基站位置和GNSS卫星设置
%% 传感器位置(GNSS和5G均为8个点)
% GNSS卫星位置
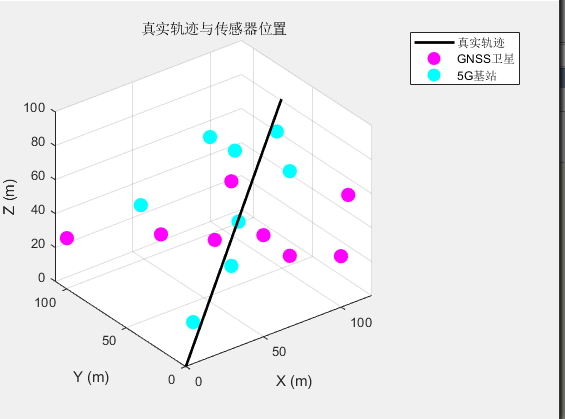
gnss_pos = [0, 100, 50, 80, 120, 60, 30, 90;
100, 0, 0, 80, 20, 40, 60, 30;
30, 30, 60, 10, 50, 70, 40, 20];
% 5G基站位置
bs_pos = [20, 60, 80, 40, 100, 120, 90, 70;
20, 40, 60, 90, 110, 80, 30, 50;
10, 20, 30, 40, 50, 60, 70, 80];经过挑选,设置了8组卫星和5G基站位置,列为一组数据的X,Y,Z三轴坐标点,其分布如下:
GDOP(Geometric Dilution of Precision,几何精度因子)是衡量卫星导航系统(如 GPS、北斗)中卫星几何分布对定位精度影响的关键指标。其核心原理是:卫星在空间中的几何分布越分散,定位精度越高;分布越集中(如共线或共面),定位误差越大。GDOP的数值越低,代表此时卫星等的空间构型更好,对于定位精度帮助越高。
计算原理如下所示:
%% GDOP计算函数
function gdop = calculate_gdop(anchor_pos, user_pos)
num_anchors = size(anchor_pos, 2);
G = zeros(num_anchors, 4); % 几何矩阵
for i = 1:num_anchors
dx = anchor_pos(1,i) - user_pos(1);
dy = anchor_pos(2,i) - user_pos(2);
dz = anchor_pos(3,i) - user_pos(3);
dist = norm([dx; dy; dz]);
% 填充几何矩阵
G(i,1) = dx / dist;
G(i,2) = dy / dist;
G(i,3) = dz / dist;
G(i,4) = 1; % 钟差项
end
% 计算位置精度因子
Q = inv(G' * G); % 精度矩阵
gdop = sqrt(trace(Q)); % GDOP = √(tr(Q))
endGDOP计算结果如下图:
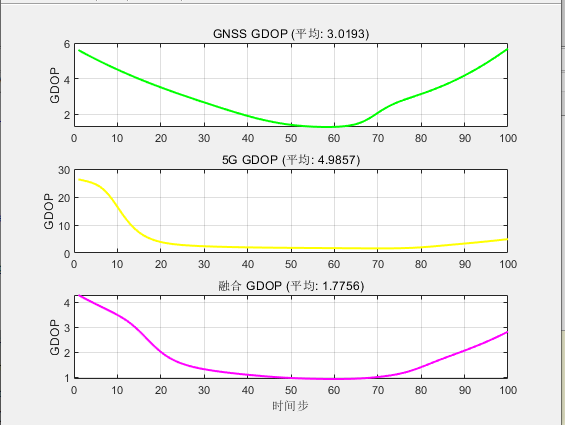
由平均值确定5G基站和GNSS位置选择没有问题,可以满足较好的定位效果。
生成伪距测量(带噪声)
%% 噪声参数
gnss_noise_std = 5; % GNSS测量噪声标准差
bs_noise_std = 2; % 5G测量噪声标准差
%% 生成伪距测量(带噪声)
gnss_meas = zeros(size(gnss_pos, 2), num_steps); % 8行×num_steps列
bs_meas = zeros(size(bs_pos, 2), num_steps); % 8行×num_steps列
gnss_gdop = zeros(1, num_steps);
bs_gdop = zeros(1, num_steps);
fusion_gdop = zeros(1, num_steps);
for t = 1:num_steps
for i = 1:size(gnss_pos, 2)
gnss_meas(i, t) = norm(true_pos(:, t) - gnss_pos(:, i)) + gnss_noise_std*randn;
end
for i = 1:size(bs_pos, 2)
bs_meas(i, t) = norm(true_pos(:, t) - bs_pos(:, i)) + bs_noise_std*randn;
end通过设置噪声参数,对于每时每刻的载体运动,因为已知5G基站或者GNSS卫星位置,也知道载体位置,而卫星定位本质也是伪距的确认,同时5G定位也有位置测量的方法(TOA),所以可以通过设置测量噪声进行简单模拟,得到带有噪声的位置测量量。
最小二乘法定位函数
位置的确定采用最小二乘法,利用第一个坐标点为锚点,非线性方程转变为AX=B,线性方程进行求解,具体实现如下:
function pos = ls_positioning_3d(anchor_pos, distances)
num_anchors = size(anchor_pos, 2);
if num_anchors < 4 % 三维定位至少需要4个锚点
error('至少需要4个锚点进行三维定位');
end
A = zeros(num_anchors-1, 3);
b = zeros(num_anchors-1, 1);
for i = 2:num_anchors
A(i-1,:) = 2*(anchor_pos(:,i)' - anchor_pos(:,1)');
b(i-1) = distances(1)^2 - distances(i)^2 + ...
sum(anchor_pos(:,i).^2) - sum(anchor_pos(:,1).^2);
end
pos = A\b; % 最小二乘解
end卡尔曼滤波设置
% 状态向量 [x; y; z; vx; vy; vz]
x_lc = [0; 0; 0; 1; 1; 1];
P_lc = eye(6)*100; % 初始状态协方差矩阵
% 状态转移矩阵(匀速模型)
F = [eye(3), eye(3)*dt;
zeros(3), eye(3)];
% 过程噪声协方差矩阵
Q = eye(6) * 0.01;
% 观测矩阵(直接观测位置)
H = [eye(3), zeros(3)];
% 观测噪声协方差矩阵
R_gnss = eye(3) * gnss_noise_std^2;
R_bs = eye(3) * bs_noise_std^2;
% 初始化结果存储
est_lc = zeros(6, num_steps); % 松耦合估计结果
gnss_only_est = zeros(3, num_steps); % GNSS单独定位结果
bs_only_est = zeros(3, num_steps); % 5G单独定位结果
gnss_weight = zeros(1, num_steps); % GNSS权重
bs_weight = zeros(1, num_steps); % 5G权重、卡尔曼滤波主循环
for t = 1:num_steps
% 基于最小二乘法的位置估计
gnss_est = ls_positioning_3d(gnss_pos, gnss_meas(:, t));
bs_est = ls_positioning_3d(bs_pos, bs_meas(:, t));
% 保存单独的估计结果
gnss_only_est(:, t) = gnss_est;
bs_only_est(:, t) = bs_est;
% 基于噪声水平的自适应权重计算
total_uncertainty = gnss_noise_std^2 + bs_noise_std^2;
gnss_weight(t) = bs_noise_std^2 / total_uncertainty; % GNSS权重
bs_weight(t) = gnss_noise_std^2 / total_uncertainty; % 5G权重
% 加权融合观测值
z = gnss_weight(t) * gnss_est + bs_weight(t) * bs_est;
% 卡尔曼滤波预测步骤
x_lc = F * x_lc;
P_lc = F * P_lc * F' + Q;
% 卡尔曼滤波更新步骤
y = z - H * x_lc;
R_lc = (gnss_weight(t)^2 * R_gnss + bs_weight(t)^2 * R_bs);
S = H * P_lc * H' + R_lc;
K = P_lc * H' / S;
x_lc = x_lc + K * y;
P_lc = (eye(6) - K * H) * P_lc;
% 保存当前时刻的状态估计
est_lc(:, t) = x_lc;
end这里采用了加权的卡尔曼滤波,根据噪声量的不同对测量值进行权重分配,以衡量测量值的可信度。
具体输出如下:
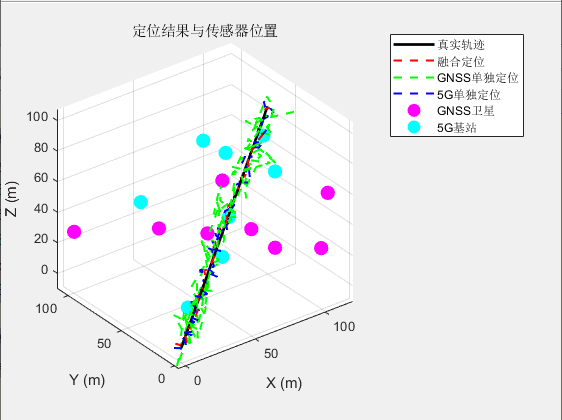
误差分析如下:
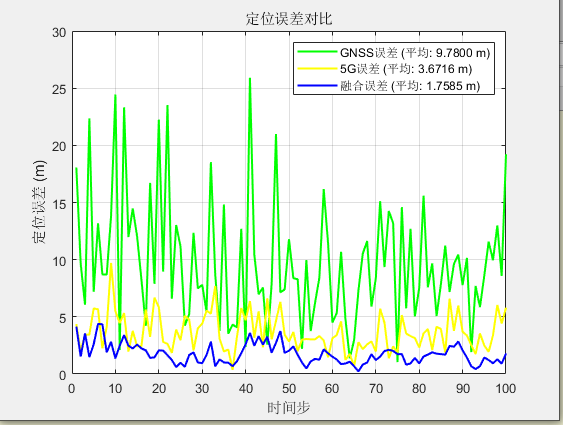
可以看出相较于单独GNSS和5G定位,融合定位误差更低,滤波效果符合预期。
附录(完整代码)
下面是完整代码,想要下载的也可以前往:
【免费】利用卡尔曼滤波进行5G+GNSS松耦合资源-优快云文库
clc;
clear;
close all;
%% 模拟参数
num_steps = 100; % 仿真步数
dt = 1; % 时间间隔(秒)
%% 轨迹生成
% 真实轨迹(匀速直线运动 三维)
true_pos = [linspace(0, 100, num_steps); % X坐标从0到100米
linspace(0, 50, num_steps); % Y坐标从0到50米
linspace(0, 100, num_steps)]; % Z坐标从0到100米
%% 传感器位置(GNSS和5G均为8个点)
% GNSS卫星位置
gnss_pos = [0, 100, 50, 80, 120, 60, 30, 90;
100, 0, 0, 80, 20, 40, 60, 30;
30, 30, 60, 10, 50, 70, 40, 20];
% 5G基站位置
bs_pos = [20, 60, 80, 40, 100, 120, 90, 70;
20, 40, 60, 90, 110, 80, 30, 50;
10, 20, 30, 40, 50, 60, 70, 80];
%% 噪声参数
gnss_noise_std = 5; % GNSS测量噪声标准差
bs_noise_std = 2; % 5G测量噪声标准差
%% 生成伪距测量(带噪声)
gnss_meas = zeros(size(gnss_pos, 2), num_steps); % 8行×num_steps列
bs_meas = zeros(size(bs_pos, 2), num_steps); % 8行×num_steps列
gnss_gdop = zeros(1, num_steps);
bs_gdop = zeros(1, num_steps);
fusion_gdop = zeros(1, num_steps);
for t = 1:num_steps
for i = 1:size(gnss_pos, 2)
gnss_meas(i, t) = norm(true_pos(:, t) - gnss_pos(:, i)) + gnss_noise_std*randn;
end
for i = 1:size(bs_pos, 2)
bs_meas(i, t) = norm(true_pos(:, t) - bs_pos(:, i)) + bs_noise_std*randn;
end
% 计算几何精度因子(GDOP)
gnss_gdop(t) = calculate_gdop(gnss_pos, true_pos(:, t));
bs_gdop(t) = calculate_gdop(bs_pos, true_pos(:, t));
fusion_gdop(t) = calculate_gdop([gnss_pos, bs_pos], true_pos(:, t));
end
%% 松耦合卡尔曼滤波器
% 状态向量 [x; y; z; vx; vy; vz]
x_lc = [0; 0; 0; 1; 1; 1];
P_lc = eye(6)*100; % 初始状态协方差矩阵
% 状态转移矩阵(匀速模型)
F = [eye(3), eye(3)*dt;
zeros(3), eye(3)];
% 过程噪声协方差矩阵
Q = eye(6) * 0.01;
% 观测矩阵(直接观测位置)
H = [eye(3), zeros(3)];
% 观测噪声协方差矩阵
R_gnss = eye(3) * gnss_noise_std^2;
R_bs = eye(3) * bs_noise_std^2;
% 初始化结果存储
est_lc = zeros(6, num_steps); % 松耦合估计结果
gnss_only_est = zeros(3, num_steps); % GNSS单独定位结果
bs_only_est = zeros(3, num_steps); % 5G单独定位结果
gnss_weight = zeros(1, num_steps); % GNSS权重
bs_weight = zeros(1, num_steps); % 5G权重
% 卡尔曼滤波主循环
for t = 1:num_steps
% 基于最小二乘法的位置估计
gnss_est = ls_positioning_3d(gnss_pos, gnss_meas(:, t));
bs_est = ls_positioning_3d(bs_pos, bs_meas(:, t));
% 保存单独的估计结果
gnss_only_est(:, t) = gnss_est;
bs_only_est(:, t) = bs_est;
% 基于噪声水平的自适应权重计算
total_uncertainty = gnss_noise_std^2 + bs_noise_std^2;
gnss_weight(t) = bs_noise_std^2 / total_uncertainty; % GNSS权重
bs_weight(t) = gnss_noise_std^2 / total_uncertainty; % 5G权重
% 加权融合观测值
z = gnss_weight(t) * gnss_est + bs_weight(t) * bs_est;
% 卡尔曼滤波预测步骤
x_lc = F * x_lc;
P_lc = F * P_lc * F' + Q;
% 卡尔曼滤波更新步骤
y = z - H * x_lc;
R_lc = (gnss_weight(t)^2 * R_gnss + bs_weight(t)^2 * R_bs);
S = H * P_lc * H' + R_lc;
K = P_lc * H' / S;
x_lc = x_lc + K * y;
P_lc = (eye(6) - K * H) * P_lc;
% 保存当前时刻的状态估计
est_lc(:, t) = x_lc;
end
%% 误差计算
time = 1:num_steps;
gnss_error = zeros(1, num_steps);
bs_error = zeros(1, num_steps);
lc_error = zeros(1, num_steps);
for t = 1:num_steps
gnss_error(t) = norm(gnss_only_est(:, t) - true_pos(:, t));
bs_error(t) = norm(bs_only_est(:, t) - true_pos(:, t));
lc_error(t) = norm(est_lc(1:3, t) - true_pos(:, t));
end
% 计算统计量
avg_gnss_error = mean(gnss_error);
avg_bs_error = mean(bs_error);
avg_lc_error = mean(lc_error);
avg_gnss_gdop = mean(gnss_gdop);
avg_bs_gdop = mean(bs_gdop);
avg_fusion_gdop = mean(fusion_gdop);
%% 结果可视化
% 图1:融合定位结果与传感器位置
figure(1);
plot3(true_pos(1,:), true_pos(2,:), true_pos(3,:), 'k-', 'LineWidth', 2); hold on;
plot3(est_lc(1,:), est_lc(2,:), est_lc(3,:), 'r--', 'LineWidth', 1.5);
plot3(gnss_only_est(1,:), gnss_only_est(2,:), gnss_only_est(3,:), 'g--', 'LineWidth', 1.5);
plot3(bs_only_est(1,:), bs_only_est(2,:), bs_only_est(3,:), 'b--', 'LineWidth', 1.5);
plot3(gnss_pos(1,:), gnss_pos(2,:), gnss_pos(3,:), 'mo', 'MarkerSize', 10, 'MarkerFaceColor', 'm');
plot3(bs_pos(1,:), bs_pos(2,:), bs_pos(3,:), 'co', 'MarkerSize', 10, 'MarkerFaceColor', 'c');
legend('真实轨迹', '融合定位', 'GNSS单独定位','5G单独定位','GNSS卫星', '5G基站');
xlabel('X (m)'); ylabel('Y (m)'); zlabel('Z (m)');
title('定位结果与传感器位置');
grid on; axis equal;
% 图2:GNSS单独定位结果
figure(2);
plot3(true_pos(1,:), true_pos(2,:), true_pos(3,:), 'k-', 'LineWidth', 2); hold on;
plot3(gnss_only_est(1,:), gnss_only_est(2,:), gnss_only_est(3,:), 'g--', 'LineWidth', 1.5);
plot3(gnss_pos(1,:), gnss_pos(2,:), gnss_pos(3,:), 'mo', 'MarkerSize', 10, 'MarkerFaceColor', 'm');
legend('真实轨迹', 'GNSS定位', 'GNSS卫星');
xlabel('X (m)'); ylabel('Y (m)'); zlabel('Z (m)');
title('GNSS单独定位结果');
grid on; axis equal;
% 图3:5G单独定位结果
figure(3);
plot3(true_pos(1,:), true_pos(2,:), true_pos(3,:), 'k-', 'LineWidth', 2); hold on;
plot3(bs_only_est(1,:), bs_only_est(2,:), bs_only_est(3,:), 'y--', 'LineWidth', 1.5);
plot3(bs_pos(1,:), bs_pos(2,:), bs_pos(3,:), 'co', 'MarkerSize', 10, 'MarkerFaceColor', 'c');
legend('真实轨迹', '5G定位', '5G基站');
xlabel('X (m)'); ylabel('Y (m)'); zlabel('Z (m)');
title('5G单独定位结果');
grid on; axis equal;
% 图4:定位误差对比
figure(4);
plot(time, gnss_error, 'g-', 'LineWidth', 1.5); hold on;
plot(time, bs_error, 'y-', 'LineWidth', 1.5);
plot(time, lc_error, 'b-', 'LineWidth', 1.5);
legend(['GNSS误差 (平均: ' num2str(avg_gnss_error, '%.4f') ' m)'], ...
['5G误差 (平均: ' num2str(avg_bs_error, '%.4f') ' m)'], ...
['融合误差 (平均: ' num2str(avg_lc_error, '%.4f') ' m)']);
xlabel('时间步'); ylabel('定位误差 (m)');
title('定位误差对比');
grid on;
% 图5:自适应权重变化
figure(5);
plot(time, gnss_weight, 'g-', 'LineWidth', 1.5); hold on;
plot(time, bs_weight, 'c-', 'LineWidth', 1.5);
legend('GNSS权重', '5G权重');
xlabel('时间步'); ylabel('权重');
title('自适应权重变化');
grid on;
% 图6:几何精度因子对比
figure(6);
plot(time, gnss_gdop, 'g-', 'LineWidth', 1.5); hold on;
plot(time, bs_gdop, 'y-', 'LineWidth', 1.5);
plot(time, fusion_gdop, 'm-', 'LineWidth', 1.5);
legend(['GNSS GDOP (平均: ' num2str(avg_gnss_gdop, '%.4f') ')'], ...
['5G GDOP (平均: ' num2str(avg_bs_gdop, '%.4f') ')'], ...
['融合 GDOP (平均: ' num2str(avg_fusion_gdop, '%.4f') ')']);
xlabel('时间步'); ylabel('GDOP');
title('几何精度因子变化');
grid on;
% 图7:GDOP分离子图
figure(7);
subplot(3,1,1);
plot(time, gnss_gdop, 'g-', 'LineWidth', 1.5);
title(['GNSS GDOP (平均: ' num2str(avg_gnss_gdop, '%.4f') ')']);
ylabel('GDOP');
grid on;
subplot(3,1,2);
plot(time, bs_gdop, 'y-', 'LineWidth', 1.5);
title(['5G GDOP (平均: ' num2str(avg_bs_gdop, '%.4f') ')']);
ylabel('GDOP');
grid on;
subplot(3,1,3);
plot(time, fusion_gdop, 'm-', 'LineWidth', 1.5);
title(['融合 GDOP (平均: ' num2str(avg_fusion_gdop, '%.4f') ')']);
xlabel('时间步');
ylabel('GDOP');
grid on;
% 图8:真实轨迹与传感器位置
figure(8);
plot3(true_pos(1,:), true_pos(2,:), true_pos(3,:), 'k-', 'LineWidth', 2); hold on;
plot3(gnss_pos(1,:), gnss_pos(2,:), gnss_pos(3,:), 'mo', 'MarkerSize', 10, 'MarkerFaceColor', 'm');
plot3(bs_pos(1,:), bs_pos(2,:), bs_pos(3,:), 'co', 'MarkerSize', 10, 'MarkerFaceColor', 'c');
legend('真实轨迹', 'GNSS卫星', '5G基站');
xlabel('X (m)'); ylabel('Y (m)'); zlabel('Z (m)');
title('真实轨迹与传感器位置');
grid on; axis equal;
%% 最小二乘法定位函数
function pos = ls_positioning_3d(anchor_pos, distances)
num_anchors = size(anchor_pos, 2);
if num_anchors < 4 % 三维定位至少需要4个锚点
error('至少需要4个锚点进行三维定位');
end
A = zeros(num_anchors-1, 3);
b = zeros(num_anchors-1, 1);
for i = 2:num_anchors
A(i-1,:) = 2*(anchor_pos(:,i)' - anchor_pos(:,1)');
b(i-1) = distances(1)^2 - distances(i)^2 + ...
sum(anchor_pos(:,i).^2) - sum(anchor_pos(:,1).^2);
end
pos = A\b; % 最小二乘解
end
%% GDOP计算函数
function gdop = calculate_gdop(anchor_pos, user_pos)
num_anchors = size(anchor_pos, 2);
G = zeros(num_anchors, 4); % 几何矩阵
for i = 1:num_anchors
dx = anchor_pos(1,i) - user_pos(1);
dy = anchor_pos(2,i) - user_pos(2);
dz = anchor_pos(3,i) - user_pos(3);
dist = norm([dx; dy; dz]);
% 填充几何矩阵
G(i,1) = dx / dist;
G(i,2) = dy / dist;
G(i,3) = dz / dist;
G(i,4) = 1; % 钟差项
end
% 计算位置精度因子
Q = inv(G' * G); % 精度矩阵
gdop = sqrt(trace(Q)); % GDOP = √(tr(Q))
end


















 1699
1699

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











