







 当电脑安装了Anaconda后,打开ROS可能会因默认使用conda的Python环境导致冲突。正确的解决方案是通过修改conda配置,设置`auto_activate_base`为`false`,避免启动时自动激活base环境。若需恢复,只需将该参数设回`true`。
当电脑安装了Anaconda后,打开ROS可能会因默认使用conda的Python环境导致冲突。正确的解决方案是通过修改conda配置,设置`auto_activate_base`为`false`,避免启动时自动激活base环境。若需恢复,只需将该参数设回`true`。
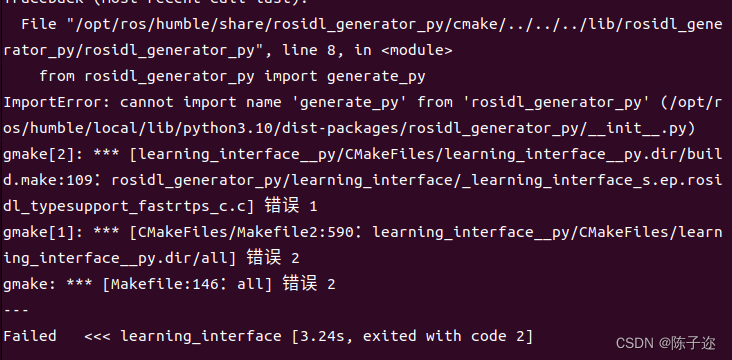
如果出现以下错误:是不是你的电脑安装了anaconda?没错就是anaconda和ros冲突了 因为我们此时打开终端界面是在anaconda的base环境里,这是打开ros会默认调用conda的python
之间看了一个up主解决办法是注释掉.bashrc文件里conda部分 这无疑是杀鸡取卵。放弃
正确解决办法:
通过将auto_activate_base参数设置为false实现
conda config --set auto_activate_base false
如果哪天又希望一直将base环境激活则执行以下指令即可
conda config --set auto_activate_base true
ok 大功告成



















 2459
2459

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











