




 本文探讨使用固态激光器实现SLAM算法,重点介绍了PCL库在点云处理中的应用,包括数据结构、滤波、特征估计等。同时,文章还讨论了不同固态激光供应商的产品特点,如Neuvition、RoboSense和Velodyne。
本文探讨使用固态激光器实现SLAM算法,重点介绍了PCL库在点云处理中的应用,包括数据结构、滤波、特征估计等。同时,文章还讨论了不同固态激光供应商的产品特点,如Neuvition、RoboSense和Velodyne。
PCL 和 solid state Lidar SLAM
在这里主要的目的是想要使用固态激光器solid state lidar设备来实现SLAM算法。
- PCL库浏览,并且分析可能会固态激光SLAM有帮助的部分
- 固态激光器介绍
- 激光SLAM实现 Video Lidar SLAM
1. PCL学习关注点
1.1 数据结构-KDtree和八叉树
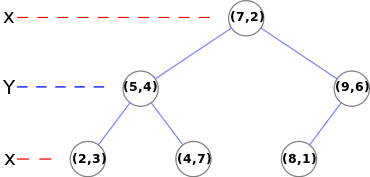
k-d tree decomposition for the point set : (2,3), (5,4), (9,6), (4,7), (8,1), (7,2)。
- 可以用来实现邻域的快速搜索。比如在ICP中,搜索最近邻点,可以设定ICP方法使用KD-Tree加速搜索。
- 底层的八叉树数据格式可以支持点云的快速压缩和合并。
- 可以使用八叉树结构分析点云数据之间的空间变化 code,通过检测体素的变化实现,可以用在motion detection上。
1.1.1 检测体素变化
下面就是使用这种方法,在ICP匹配之后寻找变化的点(如果ICP能够提供outlier就好了。。就不用这么麻烦的搞了,但是我死活没有找到接口,哪位大神知道的话指点一下)。
int GLidarSLAM::CompareAndFindOutlier(pcl::PointCloud<pcl::PointXYZRGBA>::Ptr cloud_old,
pcl::PointCloud<pcl::PointXYZRGBA>::Ptr cloud_new,
Eigen::Matrix4d transformation_matrix,
Eigen::Matrix4d transformation_matrix_to_world)
{
float octreeResolution = 1.0f;
pcl::octree::OctreePointCloudChangeDetector<pcl::PointXYZRGBA> octree(octreeResolution);
// 加入旧的点云数据
octree.setInputCloud(cloud_old);
octree.addPointsFromInputCloud();
// switch buffer
octree.switchBuffers();
// 把新的点云数据通过ICP求得的变换矩阵转移到旧点的坐标系下
pcl::PointCloud<pcl::PointXYZRGBA>::Ptr transformed_cloud(new pcl::PointCloud<pcl::PointXYZRGBA>);
pcl::transformPointCloud(*cloud_new, *transformed_cloud, transformation_matrix);
// 加入新的转换后的点云
octree.setInputCloud(transformed_cloud);
octree.addPointsFromInputCloud();
// 然后获取变化的点云数据
// retrieve the new points -> indices are index of the new point cloud
std::vector<int> newPointIdxVector;
octree.getPointIndicesFromNewVoxels(newPointIdxVector);
int nFound = newPointIdxVector.size();
}
下面是显示的结果。可以发现,虽然确实生效了,并且有一定的筛选作用,但是明显误差还是太大了。所以下面需要进一步的滤波操作才可以。
Video show
1.1.1 对结果滤波
首先使用简单的范围计数滤波
pcl::RadiusOutlierRemoval<pcl::PointXYZRGBA> outrem;
outrem.setInputCloud(cloud_tmp);
outrem.setRadiusSearch(1.0);
outrem.setMinNeighborsInRadius(30);
outrem.filter(*cloud_changed_ptr);
1.1.2 滤波之后按照欧式距离生长
在滤波之后,点云只是变化的一部分,如果要正确的获取运动物体的整体信息,还需要对过滤之后的点云进行生长。
- 可以使用PCL提供的根据Normal生长的方法,但是其实物体的normal分别不一定是均匀的,所以我觉得这种方法并不好。
- PCL也提供了根据颜色的生长方法,和上面的理由一样,不太适合运动物体的生长。
- 我觉得最适合的应该是在去除地面之后的使用欧式距离的生长。这就要求我们自己书写生长的函数。
我就简单的实现了一个按照欧式距离的生长函数。其中很多参考了PCL点云生长的源代码,最终也得到了不错的结果。
void GLidarSLAM::ConstumeRegionGrowing(pcl::PointCloud<pcl::PointXYZRGBA>::Ptr cloud_new,
pcl::PointCloud<pcl::PointXYZRGBA>::Ptr cloud_seed, 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 17万+
17万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









