







 本文详细介绍了如何在micro_ros环境下,使用MCU(如ESP32)实现多个话题的发布,包括MCU和micro_ros的定位、配置要点以及代码解析。内容涵盖从创建Node、定义不同数据类型的Publisher到设置发布频率,同时提供了上位机的配置步骤,展示了如何查看和验证多话题的正确通信。
本文详细介绍了如何在micro_ros环境下,使用MCU(如ESP32)实现多个话题的发布,包括MCU和micro_ros的定位、配置要点以及代码解析。内容涵盖从创建Node、定义不同数据类型的Publisher到设置发布频率,同时提供了上位机的配置步骤,展示了如何查看和验证多话题的正确通信。
micro_ros通讯进阶——多个话题发布
参考:https://github.com/micro-ROS/micro_ros_arduino
[micro_ros配置]https://zhuanlan.zhihu.com/p/540924221
[发布twist]https://zhuanlan.zhihu.com/p/542563252
使用硬件:
- M5 stack Atom Lite(esp32 core)+旭日x3派(ros2 foxy)
软件环境:
-
micro_ros_arduino(foxy分支)
-
ubuntu 20.04
-
TogetherROS(兼容ros2 foxy)
0. 写在前面
0.1 MCU的定位
-
MCU适用于任务简单,实时性要求高的场景,但其算力往往不高;
-
上位机运行ROS or Linux,算力强,但实时性不如MCU。
-
因此复杂任务下,常见的情形是:
- MCU作为下位机负责实时数据采集和运动控制等简单任务
- 如传感器的数据采集、电机的PID控制等
- 上位机运行ROS2进行复杂任务
- 如SLAM建图,神经网络推理等
- MCU作为下位机负责实时数据采集和运动控制等简单任务
0.2 micro_ros的定位
-
micro_ros是上位机ROS与下位机MCU的一个连接桥梁,本质上是一个与ros无缝兼容的通讯机制。
-
其最大的特征是将MCU视作ROS中的一个Node,进而实现话题的发布,订阅,服务或action等特性。
0.3 特别注意
-
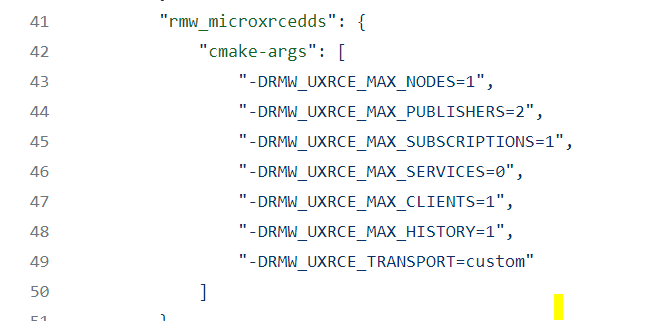
并非所有的MCU都支持多个publisher,这主要取决于MCU的RAM,可以参考:https://github.com/micro-ROS/micro_ros_arduino/tree/humble/extras/library_generation。
-
这里面.meta文件定义了publisher的最大数量等等;
-
例如针对RAM非常低的MCU,限制最大publisher数量为2,最大Node为1等等;
-
后续可按需进行rebuild。
1. 多个话题发布
- 创建1个Node,创建3个Publishers
- 每个publisher的发布频率可自定义
- 分别发布Int32,IMU,twist的数据类型
1.1 完整代码
#include <micro_ros_arduino.h>
#include <stdio.h>
#include <rcl/rcl.h>
#include <rcl/error_handling.h>
#include <rclc/rclc.h>
#include <rclc/executor.h>
#include <std_msgs/msg/int32.h> //msg1类型对应的头文件,int32
#include <sensor_msgs/msg/imu.h> //msg2类型对应的头文件,imu
#include <geometry_msgs/msg/twist.h> //msg3类型对应的头文件,twist
rcl_publisher_t publisher1; //第1个publisher
rcl_publisher_t publisher2; //第2个publisher
rcl_publisher_t publisher3; //第3个publisher
std_msgs__msg__Int32 msg1; //msg1:int32类型
sensor_msgs__msg__Imu msg2; //msg2:imu类型
geometry_msgs__msg__Twist msg3; //msg3:twist类型
rclc_executor_t executor;
rclc_support_t support;
rcl_allocator_t allocator;
rcl_node_t node;
// define 3 timer
rcl_timer_t timer1;
rcl_timer_t timer2;
rcl_timer_t timer3;
#define LED_PIN 27
#define RCCHECK(fn) { rcl_ret_t temp_rc = fn; if((temp_rc != RCL_RET_OK)){error_loop();}}
#define RCSOFTCHECK(fn) { rcl_ret_t temp_rc = fn; if((temp_rc != RCL_RET_OK)){}}
void error_loop() {
while (1) {
digitalWrite(LED_PIN, !digitalRead(LED_PIN));
delay(100);
}
}
//timer1 callback
void timer1_callback(rcl_timer_t * timer, int64_t last_call_time)
{
RCLC_UNUSED(last_call_time);
if (timer != NULL) {
RCSOFTCHECK(rcl_publish(&publisher1, &msg1, NULL));
msg1.data++;
}
}
//timer2 callback
void timer2_callback(rcl_timer_t * timer, int64_t last_call_time)
{
RCLC_UNUSED(last_call_time);
if (timer != NULL) {
/*在这里添加IMU的采集代码*/
/*我用数据自加or自减的方式模拟*/
/*ros2 interface show sensor_msgs/msg/Imu 查看IMU数据类型的详情*/
msg2.linear_acceleration.x += 0.1;
msg2.linear_acceleration.y += 0.1;
msg2.linear_acceleration.z = 9.81f;
msg2.angular_velocity.x += 0.01;
msg2.angular_velocity.y += 0.01;
msg2.angular_velocity.z += 0.01;
msg2.header.stamp.sec += 1;
msg2.header.stamp.nanosec += 1000;
msg2.orientation_covariance[0] = -1;
RCSOFTCHECK(rcl_publish(&publisher2, &msg2, NULL));
}
}
//timer3 callback
void timer3_callback(rcl_timer_t * timer, int64_t last_call_time)
{
RCLC_UNUSED(last_call_time);
if (timer != NULL) {
RCSOFTCHECK(rcl_publish(&publisher3, &msg3, NULL));
static int cnt = 0;
msg3.linear.x = 0.2; //const linear.x
msg3.angular.z = 1.0 - 0.001 * cnt; //variable angular.z
cnt++;
}
}
void setup() {
set_microros_transports();
pinMode(LED_PIN, OUTPUT);
digitalWrite(LED_PIN, HIGH);
delay(2000);
allocator = rcl_get_default_allocator();
//create init_options
RCCHECK(rclc_support_init(&support, 0, NULL, &allocator));
// create node
RCCHECK(rclc_node_init_default(&node, "micro_ros_arduino_node", "", &support));
// create publisher1
RCCHECK(rclc_publisher_init_default(
&publisher1,
&node,
ROSIDL_GET_MSG_TYPE_SUPPORT(std_msgs, msg, Int32),
"micro_ros_arduino_node_publisher1"));
// create publisher2
RCCHECK(rclc_publisher_init_default(
&publisher2,
&node,
ROSIDL_GET_MSG_TYPE_SUPPORT(sensor_msgs, msg, Imu),
"micro_ros_arduino_node_publisher2"));
// create publisher3
RCCHECK(rclc_publisher_init_default(
&publisher3,
&node,
ROSIDL_GET_MSG_TYPE_SUPPORT(geometry_msgs, msg, Twist),
"turtle1/cmd_vel"));
// create timer1,
const unsigned int timer1_timeout = 100; //发布频率10Hz
RCCHECK(rclc_timer_init_default(
&timer1,
&support,
RCL_MS_TO_NS(timer1_timeout),
timer1_callback));
// create timer2,
const unsigned int timer2_timeout = 1000; //发布频率1Hz
RCCHECK(rclc_timer_init_default(
&timer2,
&support,
RCL_MS_TO_NS(timer2_timeout),
timer2_callback));
// create timer3,
const unsigned int timer3_timeout = 500; //发布频率2Hz
RCCHECK(rclc_timer_init_default(
&timer3,
&support,
RCL_MS_TO_NS(timer3_timeout),
timer3_callback));
// create executor
RCCHECK(rclc_executor_init(&executor, &support.context, 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









