






1、预备知识
这节设计到的知识,包括自动控制系统的工程设计方法。
通常情况下,一个实际系统可以通过工程上的近似处理和调节器校正变换成 典型I(前面已讲) 或 典型 II 系统。
本节用到的工程上近似处理方法:小惯性群的近似处理,自动控制系统中有多个小时间常数的惯性环节相串联的情况,在一定条件下可以将这些小惯性环节合并为一个惯性环节。

调节器结构选择的基本思路:将控制对象校正成典型I或者典型II系统。

2、 电流环PI参数整定
2.1、电流环的开环传递函数
矢量控制系统中,电流环是对 iq,id进行控制,进而控制电机转矩。
电流环的作用:在电机启动过程中能够以最大电流启动,同时在外部扰动时,能够快速恢复到电流参考值,加快动态响应速度,提高系统的稳定性。

上图为电流环传递函数框图,电流环的输入为电流信号的误差值,输出为电压,控制电机转矩。
第一个环节: PI调节器的传函,这很好理解(上节已讲)
第二个环节:延迟传函[1]
在实际计算过程中,CPU进入中断读取电流反馈值,然后进行PI调节器的计算,得到输出电压(或者三角波比较值),但是输出电压或者比较值不是立即作用出去的,通常会延迟一个PWM周期,才会将比较值输出出去。这样就造成了采样和计算的延迟,这里近似看成一阶延迟环节,时间常数为Ts(这里td=Ts)。
第三个环节: 逆变器的传函
经过第二个环节,更新了三角波的比较值后,输出的电压是立刻作用到了负载上面吗?还不是的。输出的比较值和三角波进行比较,产生PWM信号,对于7段式SVPWM来说,调制特点决定了还有0.5Ts的延时。而Kpwm为逆变器的增益,也就是逆变器输出的相电压(单位V)和PI调节器输出的相电压之间的比例关系。这个值没有一个确定的数值,受逆变器的非线性影响,这里取Kpwm为1,默认他为理想型。
第四个环节: 电机传递函数
电机传递函数可近似处理为:

说下电机传函的由来,前面讲过电机在dq轴坐标系下的电压方程:

因为对电流来说,反电动势电压变化缓慢视为常数,所以忽略耦合项的电压平衡方程为(这里只列出q轴电压方程):

上式拉式变换后得到电机的传函。
在开关频率为10KHZ时,PWM逆变器和延迟环节的时间常数都很小。工程近似就可以把延迟环节和PWM环节合并处理:

因为时间常数Ts很小,那么分母中的二次项系数可以看做0。
则可得电流传递函数框图:

则电流环的开环传函数:

2.2 、电流环参数整定
前面我们得到了电流环的开环传递函数,下面我们把开环传递函数配置成典型系统:
2.2.1、I型系统配置
I型系统开环传递函数的结构是:

Wcur(s)貌似又和I型系统的结构不一样。怎么处理? 采用零极点对消法 ,将参数设置满足
Kp/Ki=Lq/R 这个条件,让分子分母各自约去一项,就能将电流环变成了I型系统。

剩下的Wcur(s)中,分子Ki/R就是I型系统的分子K,分母中的1.5Ts就是I型系统的T。如果按
照
ξ
=
0.707
(
即
K
T
=
0.5
)
\xi=0.707(即KT=0.5)
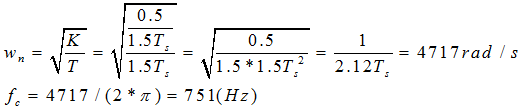
ξ=0.707(即KT=0.5) 整定:
计算出PI调节器参数为:
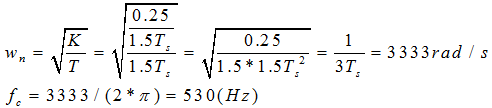
如果电流不允许有超调,我们可以按
ξ
=
1
\xi=1
ξ=1(即KT=0.25)整定:
2.3、 电流环带宽
那么电流环的带宽是多少呢,可以根据后面的文章“二阶系统的带宽(频域分析)”近似的认为
(1) 按
ξ
=
0.707
\xi=0.707
ξ=0.707整定时的带宽
(2) 按
ξ
=
1
\xi=1
ξ=1整定时的带宽
这节我们是把电流环整定成典型的二阶系统,是考虑了实际系统中的延迟时间的,下一节我们直接把电流环整定成一阶惯性系统,不考虑延迟环节,当成理想的PI控制和电机的传函直接串联,见:
[1] 延迟环节从时域变换到S域中时,即在传递函数前乘以
e
−
τ
s
e^{-\tau s}
e−τs(可以参照拉式变换的实位移定理),我们把他按泰勒级数展开取前两项
e
−
τ
s
≈
1
−
τ
s
e^{-\tau s}\approx 1- \tau s
e−τs≈1−τs而:
e − τ s ≈ 1 − τ s = ( 1 − τ s ) ( 1 + τ s ) 1 + τ s = 1 − τ 2 s 2 τ s + 1 ≈ 1 τ s + 1 e^{-\tau s}\approx 1- \tau s=\frac{(1-\tau s)(1+\tau s)}{1+\tau s} = \frac{1-\tau ^{2}s^{2}}{\tau s+1}\approx \frac{1}{\tau s+1} e−τs≈1−τs=1+τs(1−τs)(1+τs)=τs+11−τ2s2≈τs+11
因为时间常数
τ
\tau
τ很小,那么分子的二次项系数可以看做0,所以可以看出一阶惯性环节。
转载自:https://blog.youkuaiyun.com/sy243772901/article/details/82221672?depth_1-utm_source=distribute.pc_relevant.none-task&utm_source=distribute.pc_relevant.none-task
参考文章:https://zhuanlan.zhihu.com/p/26684551

















 2564
2564

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









