




1 PI 调节器参数调节
根据电机的转矩公式可以得知,id=0时,从电动机端口看,永磁同步电动机 相当于一台他励的直流电动机,定子电流中只有交轴分量,且定子磁动势空间矢 量与永磁体磁动势空间矢量正交,电动机转矩中只有永磁转矩分量,且转矩达到最大。因为电磁转矩仅仅依赖于交轴电流,从而实现了转矩表达式中的 交、直轴电流解耦。这种控制方法最为简单且在工程中较容易实现,对于隐极式 永磁同步电机而言,id=0的控制方式是最大转矩电流比的工作状态。
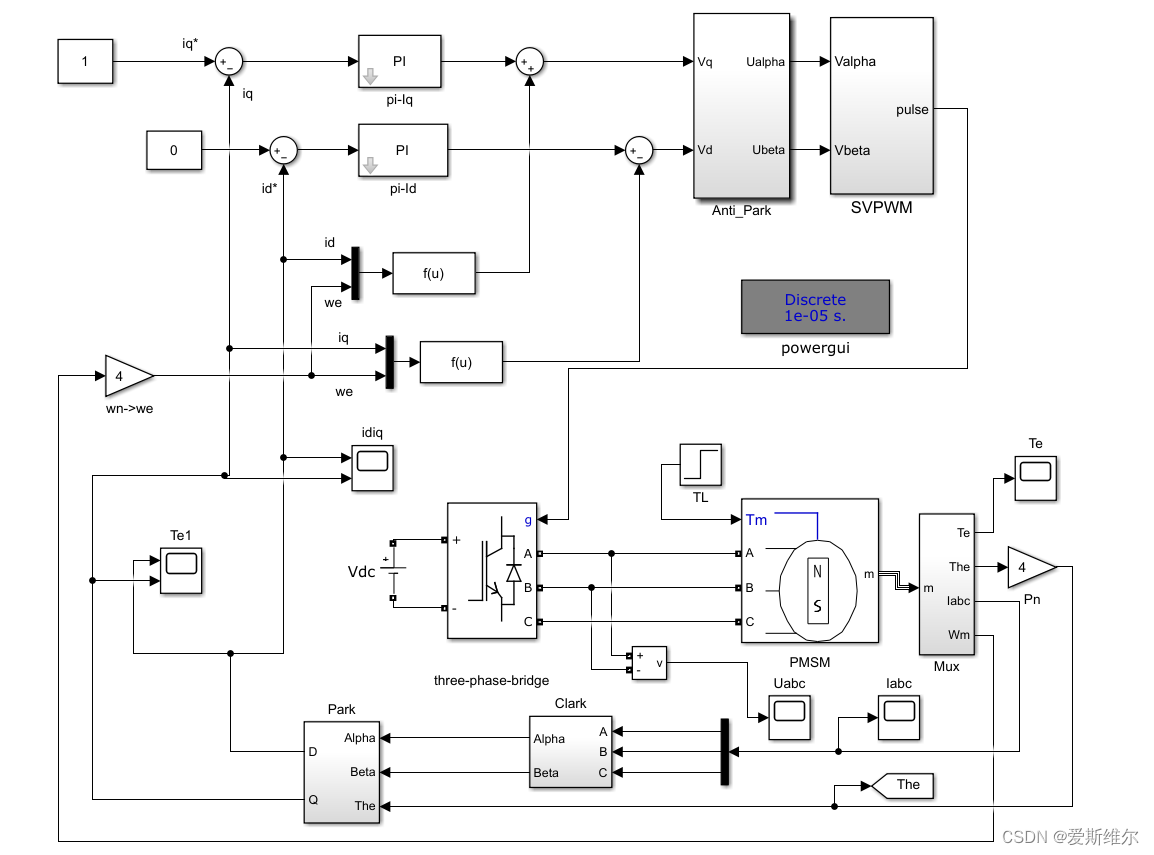
矢量控制系统中电流内环和转速外环均采用传统的 PI 调节器控制,前期已经介绍过电流环与转速环的PI参数整定方法,但实际中按照理论计算一般都是不准确,需要进行一定的手动调节,下面结合simulink介绍各 PI 调节器参数调节方法。
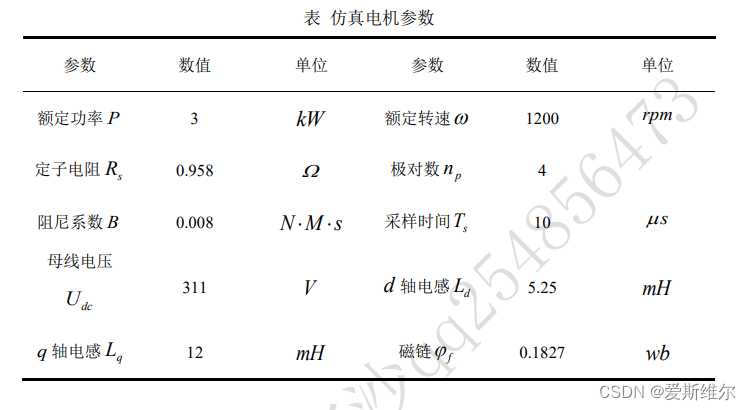
1.1电机参数
选择额定功率为3kW的凸极永磁同步电机,电机的额定转速为1200rpm,定子电阻为0.958 Ω ,直流母线电压Udc为311V,转动惯量J为0.003 kg·m2。具体电机参数如下表所示。
按照阻尼比为0.707,中频带带宽h=5进行电流环PI 参数计算,可以得到
iq电流环:Kp=400,Ki=31933
id电流环:Kp=175,Ki=31933
转速环:Kp=32.8,Ki=164000
1.2电流环调节
原则是先调电流环,然后调转速环,如图所示, id 给定为 0,iq 给定为 1,先将计算的增益参数带进去看效果如何。
这里的观察波形:
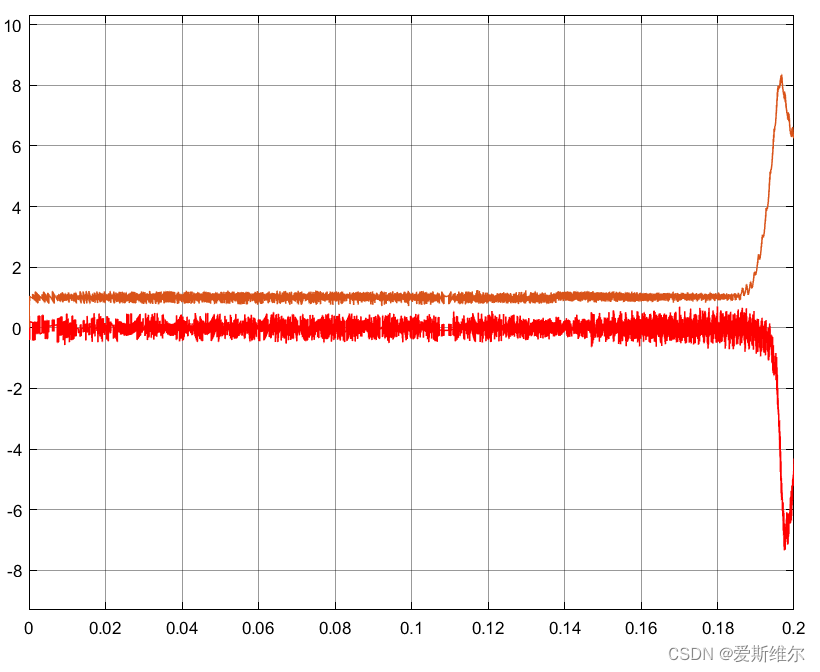
可以看到刚开始的id和iq跟随效果较好,紧紧的跟随1和0,后面跑飞了是因为电流给恒定值时,相当于一直在加速,所以当速度超出额定转速太远,电机就跑飞了,这是正常现象,我们现在只是再调节电流环,所以会有这种现象。
此时电流环已经调节完。
1.3转速环调节
转速环的PI参数其
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1188
1188

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











