







 超级会员免费看
超级会员免费看
目录
1 体素滤波原理
1.1 原理
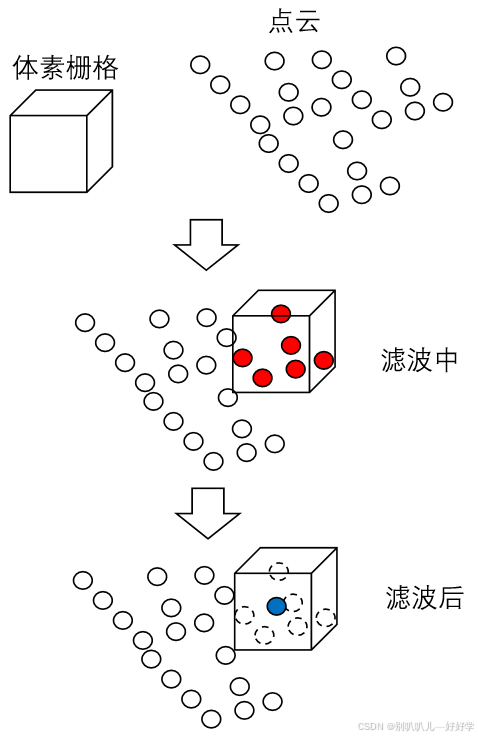
过多的点云数量会对后续分割工作带来论困难。体素网格滤波器可以达到向下采样同时不破坏点云本身几何结构的功能。 使用体素网格方法下实现采样,即可减少点的数量,又能保存点云的形状特征,在提高配准,曲面重建,形状识别等算法中非常实用。 PCL实现体素滤波有两种途径,一是借助PCL的VoxelGrid(体素网格)类,二是借助PCL的ApproximateVoxelGrid(近似体素网格)类。
1.2 VoxelGrid类
VoxelGrid类是通过输入的点云创建一个三维体素格栅,用每个体素内用体素中所有的点的重心来近似显示体素中的其他点,这样体素内的所有点都用一个重心点最终表示,对于所有体素处理后得到的过滤后的点云,这种方法比用体素中心逼近的方法慢,但是对于采样点对应的曲面表示更为准确。

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 1261
1261

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











