



面向特定应用最优运动学的医疗机器人仿真框架
摘要
用于医疗任务的机器人架构中的大多数运动学结构并非最优。此外,工作空间和有效载荷通常过大,导致产品价格高昂,不适合临床技术转化。为了研究最优的运动学结构和构型,我们开发了一个自适应仿真框架以及相关的工作流程,用于需求分析、特定机器人运动学的建模与仿真。该框架可用于构建简单且成本低廉的医疗机器人设计,并在一个工具操作任务中进行了评估,其中需要将医疗器械在患者身体上精确 定位和定向。模型质量基于可配置评分指标来衡量最大工作空间覆盖。该指标根据来自UMTRI人体形态的人体测量数据,在不同的人体形态之间进行泛化。该灵巧性度量被用于通过开源仿真工具V‐REP在仿真中分析不同的运动学结构。为此,我们基于可配置并在运动规划控制器中选择性激活的尺寸可变的解剖目标区域拼接图,开发了针对医疗任务的仿真和可视化流程。在我们的评估中,我们将具有7个关节的商用轻型机械臂与具有6、7和8个关节的优化运动学结构的灵巧性得分进行了比较。与商用硬件相比,使用优化的6维机械臂时性能提升了59%,使用7维机械臂时提升了64%,使用8维机械臂时提升了96%。我们的结果表明,在最大工作空间覆盖至关重要的医疗应用中,更简单的机器人设计可以优于通常使用的商用机械臂。我们的框架为机器人参数的全自动优化工具提供了基础,可应用于多种多样的问题。
关键词
医疗机器人,机器人运动学,优化,人体测量体型数据
https://doi.org/10.1515/cdbme‐2019‐0037
1 引言
在医疗机器人应用中,通常使用标准工业机器人,因为它们具有良好的商业可用性、产品质量和精度,尽管它们在运动学要求方面并未针对应用进行最佳优化。这些系统设计用于在各个行业中执行多种任务,因此其工作空间和有效载荷通常过大,同时价格昂贵且需要特殊的安全措施。
一些相关研究探讨了医疗机器人中的最优运动学结构。Yoshikawa [1]讨论了机器人机构在末端执行器定位和定向方面的操作能力,并提出了可操作性的度量方法。Patel [2]回顾了一些性能指标。Paden [3]提出了六旋转关节运动学的最优性定理,Nelson [4]提出了一种用于优化冗余串联球面连杆机构的蒙特卡洛仿真算法。Pamanes [5]、Zeghloul [6]和Vidaković [7]提出了寻找机器人最优布置的方法。Xiang [8]提出了一种三维空间路径预测仿真方法,Nouaille [13]提出了一种机器人医疗工具导向操作器的设计过程方法。
在本研究中,我们对动力学要求(特别是工作空间和灵巧性)进行了分析,涵盖了上述所有问题。此外,我们确定了最优机器人的设计和构型,尤其适用于医疗领域中对人体进行器械操作的应用,例如机器人辅助超声或穿刺。
2 方法
为了分析、建模和仿真特定应用最优机器人运动学,我们开发并评估了一种工作流程和软件框架。特定应用的目标工作空间被建模并与机器人工作空间进行比较,根据灵巧性度量确定评分值,从而进行了手动优化。
2.1 使用解剖体模型计算目标
工作流程的第一部分是需求分析。我们利用基于人体测量数据的具有统计代表性的解剖体模型,该模型包含尺寸和形状的一些变化,以覆盖人体解剖结构的多样性(见软件与仿真框架部分)。针对预期的医疗应用,通过从身体模型表面选择顶点来标记目标区域。同样,根据不同应用场景,可以将不同区域相互组合。
在第二个工作流程步骤中,目标工作空间和机器人工作空间的模型被并行建模。通过调整性别、患者体型、体重指数、体长和年龄等形态学参数,生成多个身体模型变体,从而创建目标工作空间,并由此产生身体表面的最小与最大外壳模型。根据DINED人体测量数据库[1],该范围从5th百分位(对应身高1.54 m,体重指数[BMI]为20)到95th百分位(1.91 m,BMI = 34)的解剖学范围内选取(见图1a)。
生成的模型数据遵循相同的通用顶点结构,仅根据输入参数在空间形变上有所不同。随后,通过分配顶点索引,将特定应用的目标区域映射到同样具有特定应用尺寸的壳体模型上。在最小壳体和最大壳体之间的后续形变过程中,可以创建任意数量的中间外壳,以控制灵巧性计算的精度。所有壳体中属于目标区域的所有顶点的叠加得到空间目标工作空间。最后,将顶点数量减少到适当的比例(在本次实验中为1533),以降低仿真中的计算需求。
2.2 优化运动学结构
我们改变了构成关节型机器人臂工作空间的所有相关运动学参数(即数量、类型,关节的活动范围和轴向偏移以及臂节长度,还有由工具尖端坐标确定的特定应用器械的工具几何结构设计。运动学设计的一般功能需求通过Siciliano设计流程[9]进行评估。设计目标是实现一种简单、轻量化、动态稳定且成本效益高的机械臂。在满足所有设计目标的前提下,尽可能减少关节数量的结构是最关键的优化准则。
2.3 灵巧性仿真
在仿真中,作为第三个工作流程部分,将两个模型组件集成到一个共同的仿真环境中并进行虚拟连接,从而确定其运动性能。已实现一种测试算法,用于近似预期医疗应用的功能需求,并使用灵巧性度量来测试运动学性能,该度量定义如下:测试仪器是否能够在所有目标位置处被虚拟定位,并以若干不同的旋转(下一节)进行参数化的Tait‐Bryan(横滚‐俯仰‐偏航)角定向。用于测试的目标位置为包含在目标工作空间模型各层中的所有选定顶点。这些顶点被赋予垂直于模型表面的方向向量。机器人模型基座在仿真空间中相对于目标模型进行定位,该位置对结果有显著影响,同样也需要进行优化。
灵巧性估计通过逆运动学计算和路径规划算法(见“软件与仿真框架”章节)实现,该算法尝试从起始位置到目标位置的无碰撞路径上找到所有目标构型。必须避免自碰撞以及与人体模型的(分层选择性)碰撞。
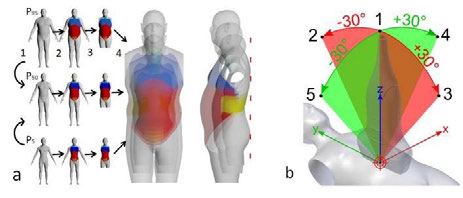 通过形变操作生成人群的5 th 和95 th百分位的人体测量壳 模型及中间壳(1),标记分组的彩色目标区域(2)、裁剪(3) 以及在仰卧位下的叠加(4,前后视图和侧视图),得到仅包含彩 色顶点的三维目标工作空间。(b)医疗器械在目标空间内每个顶 点位置相对于其方向进行灵巧性测试时所采用的5个方向的离散化 方案。)
通过形变操作生成人群的5 th 和95 th百分位的人体测量壳 模型及中间壳(1),标记分组的彩色目标区域(2)、裁剪(3) 以及在仰卧位下的叠加(4,前后视图和侧视图),得到仅包含彩 色顶点的三维目标工作空间。(b)医疗器械在目标空间内每个顶 点位置相对于其方向进行灵巧性测试时所采用的5个方向的离散化 方案。)
2.4 灵巧性度量
为了评估工具提示在所有给定目标点处的定位与取向能力,我们定义了一个评分指标。空间轴上的方向变化并非连续分析,而是以离散步骤 [10],[1] 进行测试。在这些步骤中,仪器相对于模型表面的攻击角会发生变化。如果仪器本身可旋转,则并非需要改变所有轴。
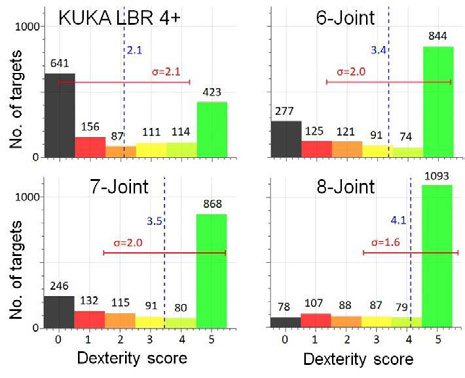
图1b展示了一个五阶段离散化方案,其中首先将虚拟工具设置为与目标点顶点相同的方向,随后对仪器的俯仰轴和滚转轴分别变化+30°和‐30°。每到达一个无碰撞位置,分数增加一分。因此,在此方案中每个单一目标点的最大可达到分数值为5。在我们的结果中,我们在图3中使用了此评分范围。
2.4.1 软件与仿真框架
三维人体模型是使用UMTRI Human Shape在线平台(美国密歇根大学)创建的,该平台主要用于产品设计中的人机工效研究。该工具包含一个基于人体全身激光扫描数据构建的统计人体测量数据模型。在选定形态学参数后,该工具可导出一系列两个或更多不同尺寸的身体表面多边形模型,并以结构化文本文件形式输出。
这些多边形模型通过使用3D Blender套件(Blender基金会,阿姆斯特丹)的自定义脚本进行修改,突出显示多边形模型中属于目标区域的顶点组,并减少顶点总数。随后,通过形变和空间对齐对序列中的多边形模型进行插值,从而生成目标工作空间体积。该对齐方式可以是应用特定的,例如针对水平或垂直的病人位置。或者,在目标工作空间模型中,可以移除无关身体的身体区域,例如四肢。
使用虚拟机器人实验平台V‐REP(Coppelia Robotics GmbH,瑞士苏黎世)开发了动力学仿真脚本。采用了其集成的逆向动力学IK计算模块。使用开放式运动规划库插件 [12] 生成无碰撞路径。
3 结果
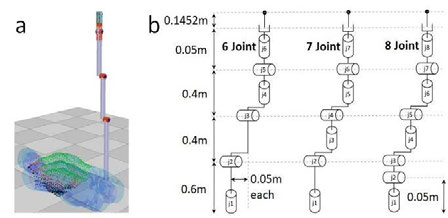
我们使用上述属性,针对平卧病人模型的超声成像任务,结合目标工作空间模型和四种不同的动力学进行了仿真(图2a)。第一种动力学(7自由度机器人KUKA LBR 4+的虚拟模型)作为参考,并被三种优化动力学(6、7和8自由度动力学)所替代。机器人基座相对于病人模型的空间布局设置在距离躯干中心50厘米处,高度与平卧面齐平。三种自制动力学及其相关参数的设计如图2 b所示。在动力学基本结构的设计中,仅使用了旋转关节,选择了轴向偏移以及从远端到近端逐渐增加的连杆长度。
我们将基准KUKA LBR4+、2.1 ± 2.1(均值±标准差)的所有末端执行器位置的平均得分值与6关节臂3.4 ± 2.0、7关节臂3.5 ± 2.0和8关节臂4.1 ±1.6的优化结构进行了比较。图3显示了四种被考察动学结构的数值仿真结果。
非优化动学结构的空间灵巧性分布在目标空间中更集中于侧向区域,而随着优化动学结构及关节数量的增加,其分布更加均匀,如图4所示。
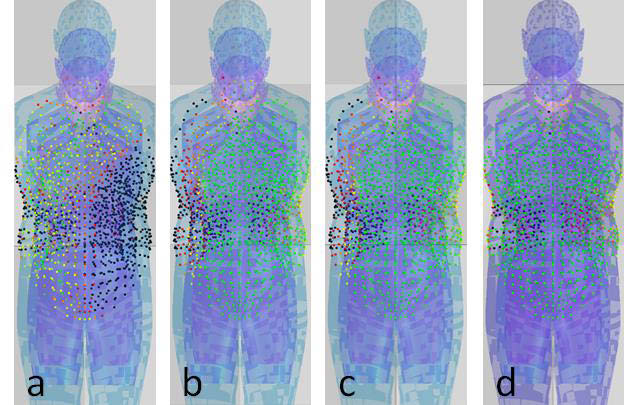 参考运动学 (a) 和自设计的6、7和8自由度动力学 (b, c, d) 在目标空间中的空间灵巧性分布的图形化可视化。使用与图3中相同的颜色来表示目标点上的灵巧性评分值。)
参考运动学 (a) 和自设计的6、7和8自由度动力学 (b, c, d) 在目标空间中的空间灵巧性分布的图形化可视化。使用与图3中相同的颜色来表示目标点上的灵巧性评分值。)
4 结论
开发了一个仿真框架,用于研究动学结构在医疗机器人应用中可用性的客观评估。由于动学设计与衍生精度之间关系复杂,此类检查无法通过直观方式进行测试,而需要系统评价。实验中使用了一款商用高精度机器人作为参考。我们将6节关节的动学结构与冗余设计进行了比较,发现冗余性并不一定会带来高精度,并且可以通过结构优化进行补偿甚至超越。这包括更长的腕长和更大的关节位移,从而实现关节的过度旋转。在实际硬件中,实施结构改进比增加额外关节更具成本效益。
最终,通过使用具有相应较低能源平衡和特定设计的轻量简易医疗机器人来满足要求,可以降低伤害风险,可能会降低到可接受的水平。在本研究中,我们探讨了优化的运动学结构在医疗应用中的优势。这是迈向全自动驾驶框架的第一步,该框架除了优化动学结构外,还将优化机器人布局和工具几何结构。在未来工作中,我们将把此类系统应用于医疗机器人以外的其他应用。

















 1761
1761

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









