




飞行控制系统是Betaflight的核心组件,负责实时飞行控制算法和数据处理。它实现了主控制回路,该回路处理传感器数据、执行控制算法并生成电机指令,以维持飞行器的稳定性和响应性。该系统在严格的实时约束下运行,以确保飞行行为的可预测性。
核心飞行控制架构
飞行控制系统采用包含多个集成子系统的实时控制回路:
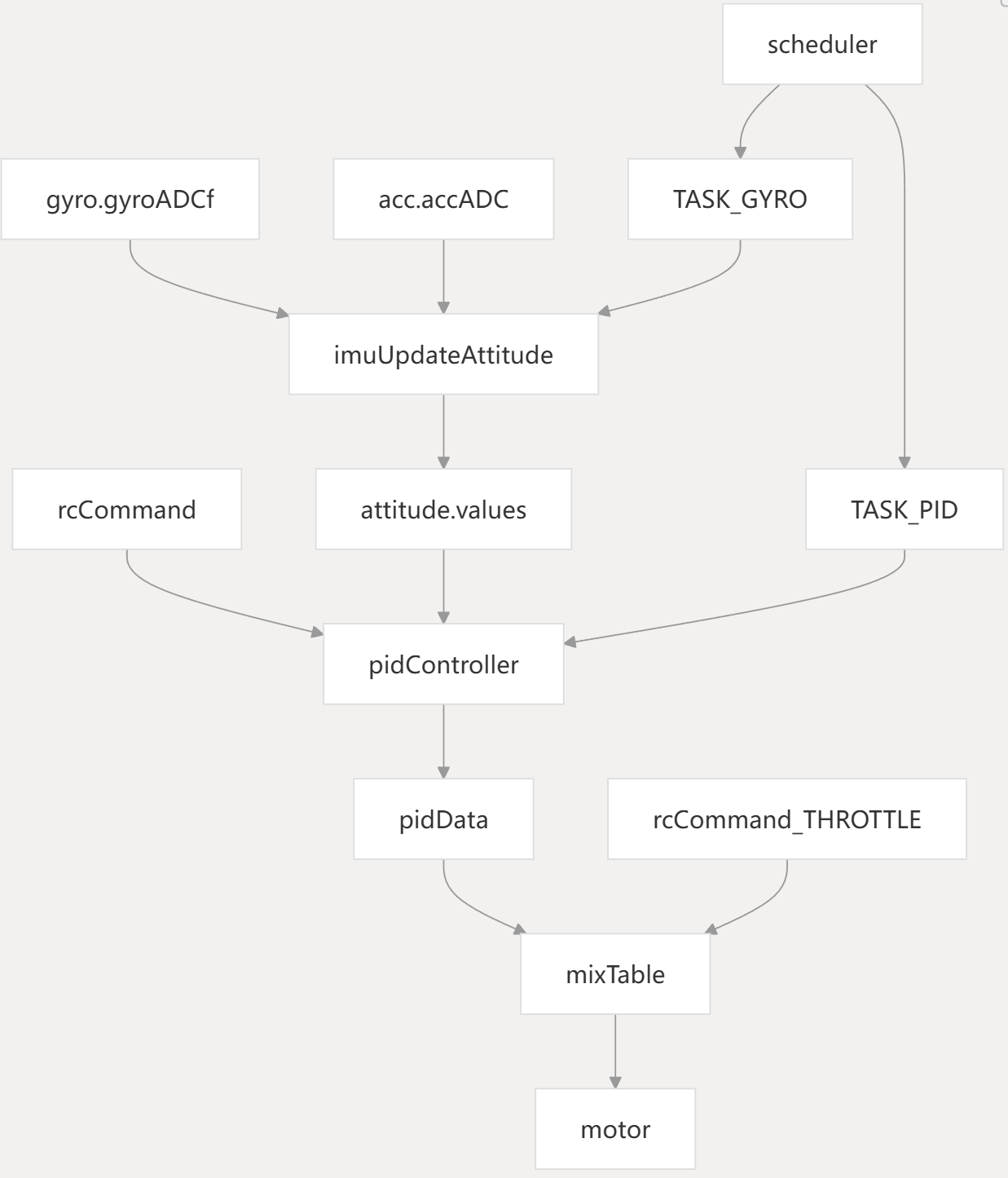
实时处理流水线
飞行控制系统在一个具有精确时间要求的确定性任务调度器中运行:
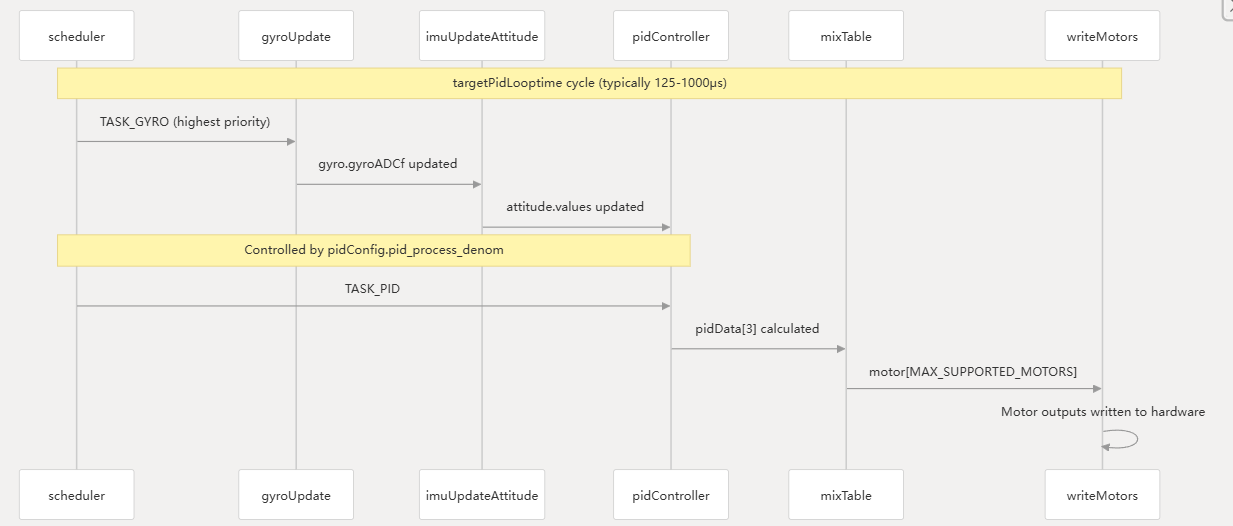
该系统通过targetPidLooptime参数和任务优先级来维持确定性时间,以确保控制回路的稳定性。
PID控制器概述
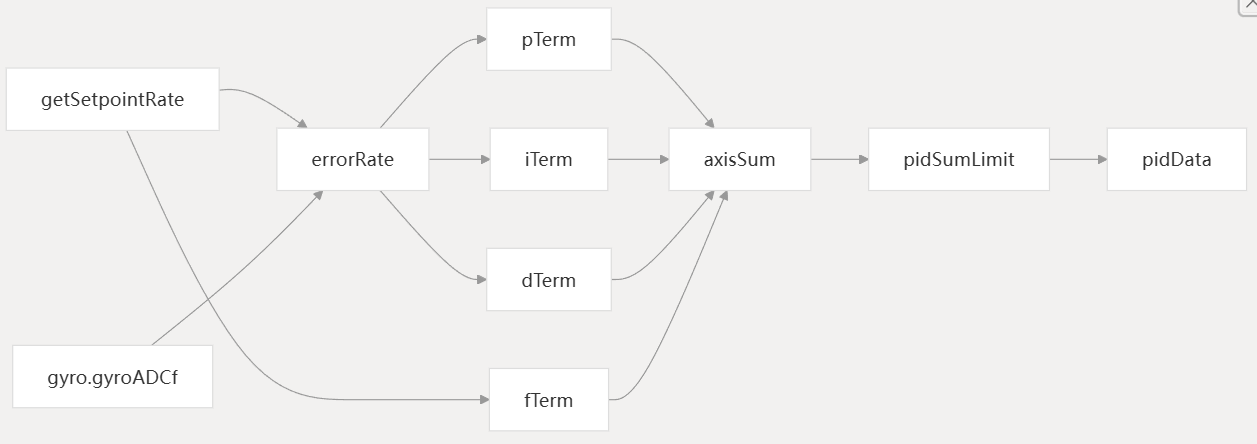
PID控制器(pidController())是核心稳定算法,用于处理姿态误差并生成控制信号。它在三个轴(横滚、俯仰、偏航)上运行,每个轴都有单独的调节参数。
PID算法结构
关键PID数据结构
| 结构 | 目的 | 地点 |
|---|---|---|
pidProfile_t |
PID增益、限制、高级功能 | src/main/flight/pid.h192-290 |
pidAxisData_t |
每轴的运行时 P、I、D、F 值 | src/main/flight/pid.h318-324 |
pidRuntime_t |
运行时状态和配置 |
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 250
250

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









