




目的和范围
惯性测量单元(IMU)和姿态系统负责融合惯性传感器数据(陀螺仪、加速度计、磁力计)和GPS航向信息,以估计飞行器在三维空间中的姿态。该系统提供驱动飞行控制回路的基本姿态参考,从而确保飞行器在所有飞行模式下都能稳定飞行。
系统架构
IMU系统作为一个传感器融合引擎,将多个输入源融合起来,生成可靠的姿态估计。核心处理在主飞行控制回路中以高频(通常为1-8kHz)进行。
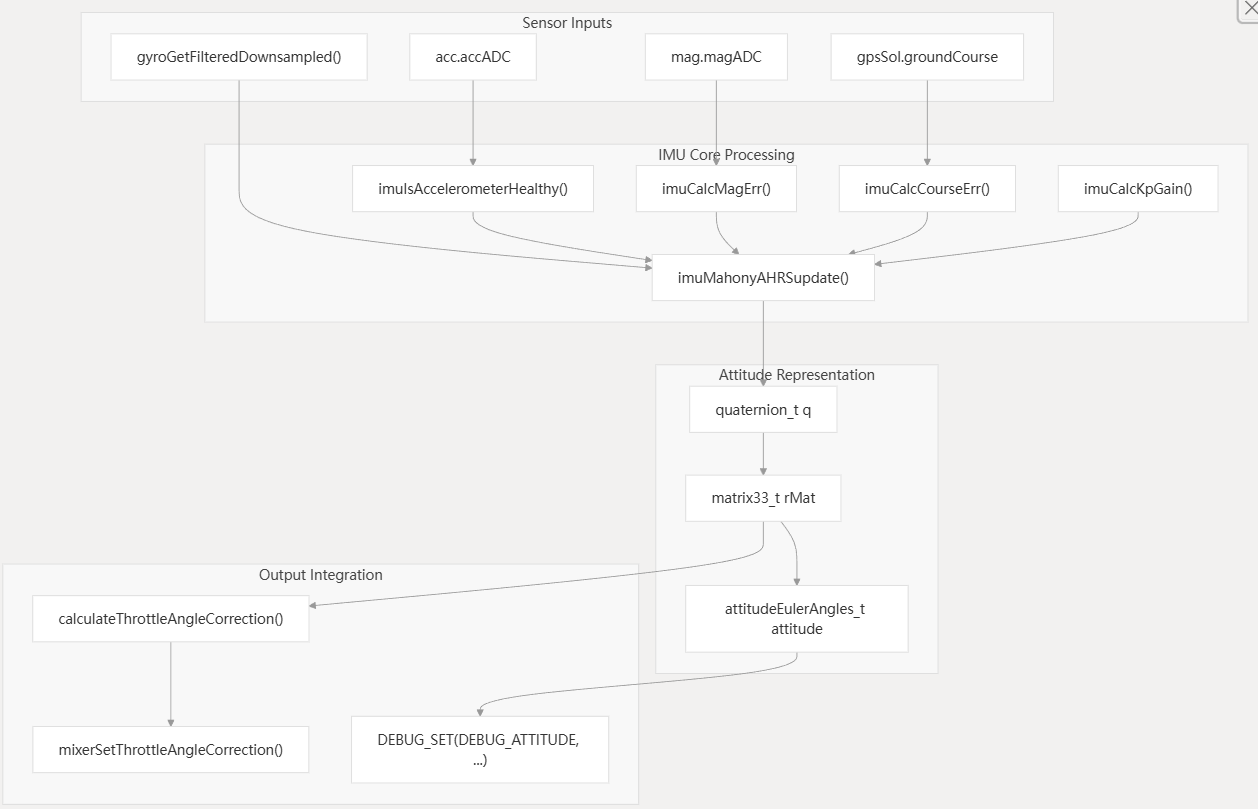
核心数据结构
IMU系统采用多种姿态数学表示方法,每种方法都针对不同的计算任务进行了优化:
| 表示 | 类型 | 目的 | 主要功能 |
|---|---|---|---|
| 四元数 | quaternion_t q | 内部计算,无奇异性 | imuMahonyAHRSupdate() |
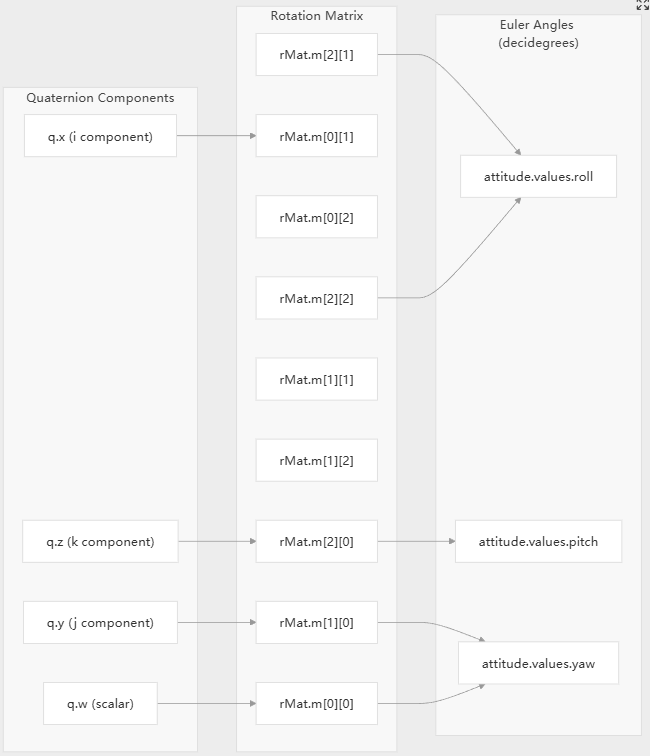
| 旋转矩阵 | matrix33_t rMat | 坐标变换 | imuComputeRotationMatrix() |
| 欧拉角 | attitudeEulerAngles_t attitude | 用户界面、飞行模式 | imuUpdateEulerAngles() |
Mahony AHRS 算法
核心姿态估计采用 Mahony 姿态航向参考系统 (AHRS) 算法,该算法融合了陀螺仪速率、加速度计和磁力计/GPS 航向修正:
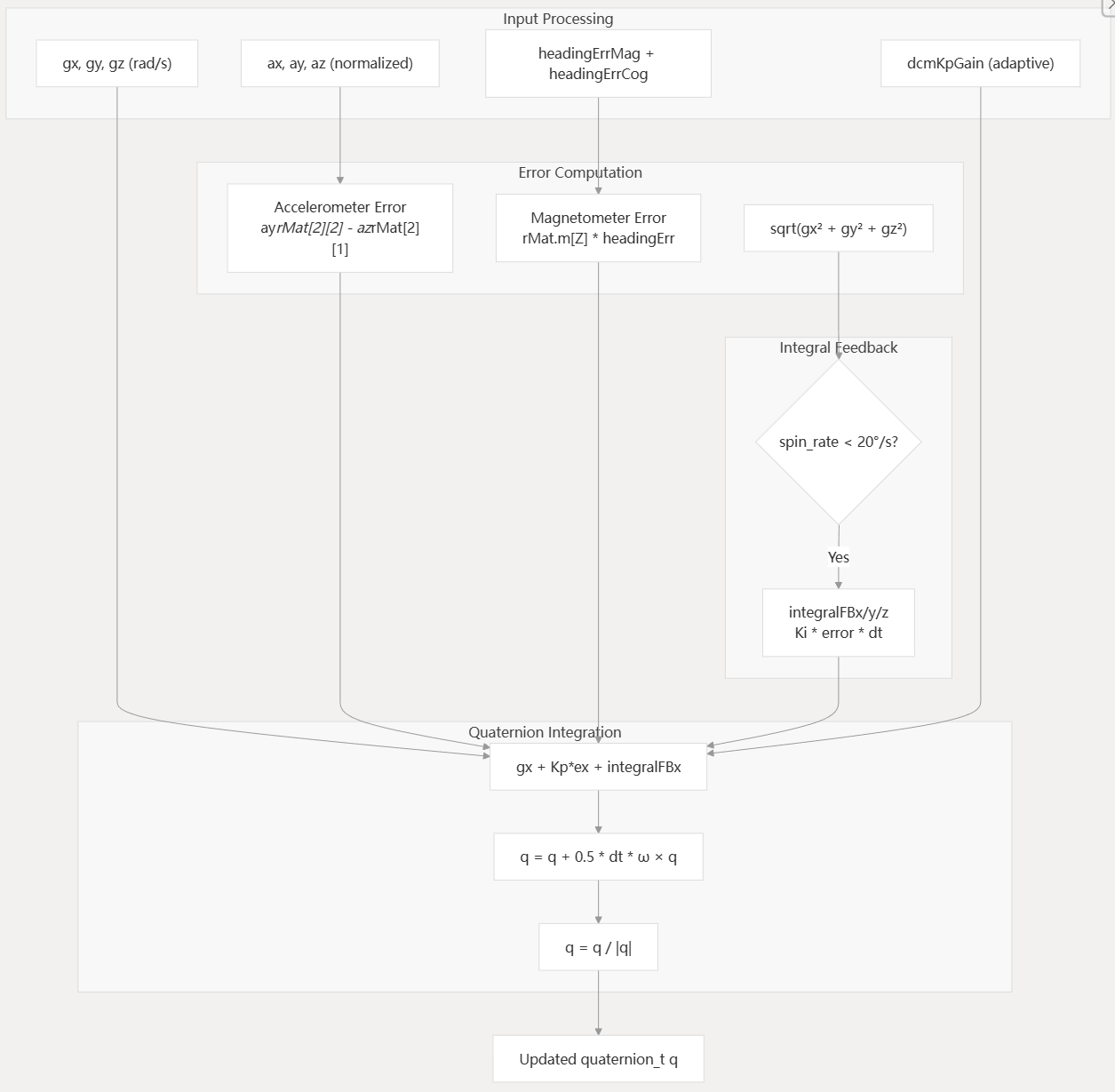
传感器融合与误差校正
IMU系统会根据飞行条件和传感器可用性调整其运行方式:
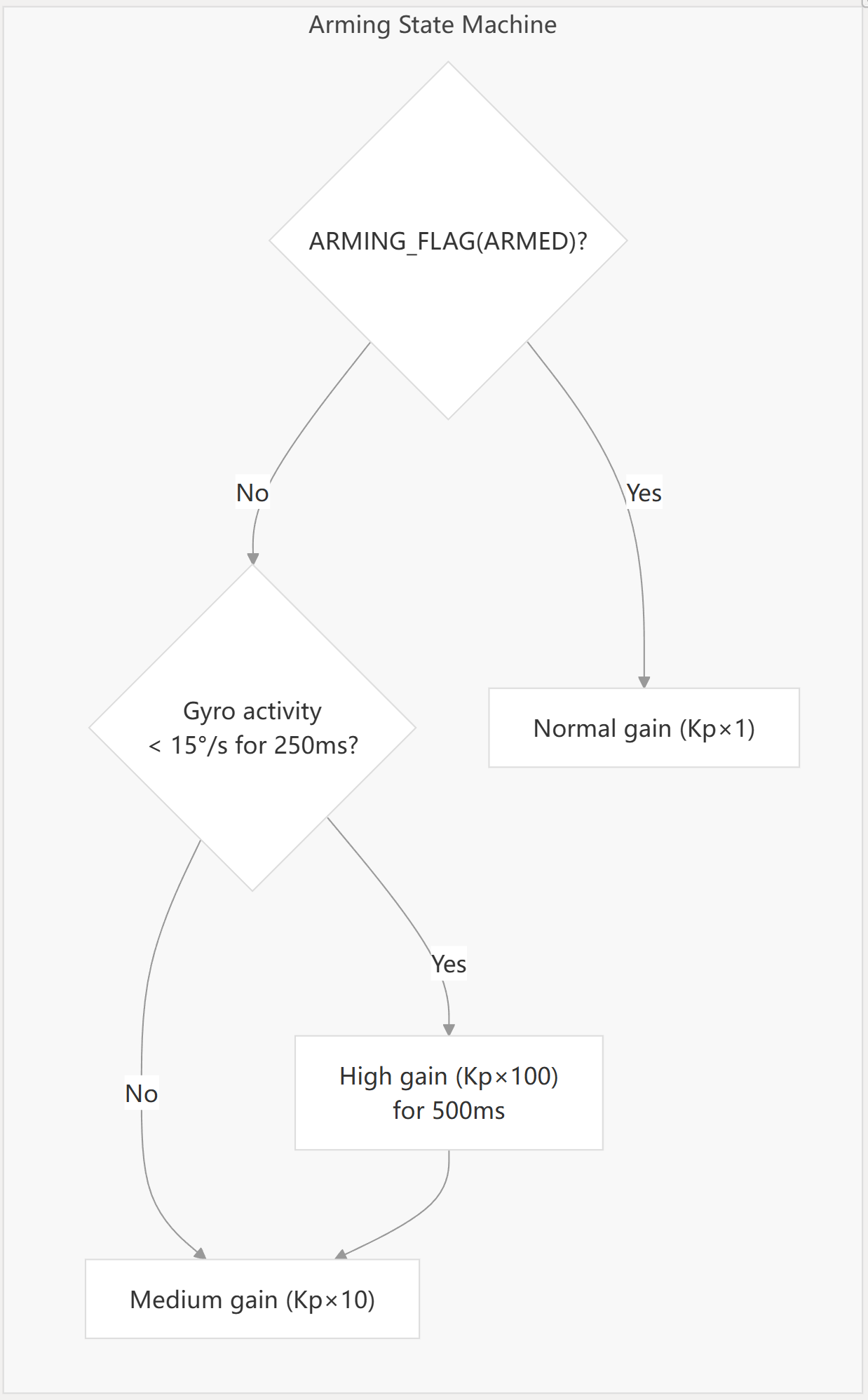
自适应增益控制
该imuCalcKpGain()功能根据武装状态和飞机运动情况调整校正增益:
GPS航向积分
GPS对地航向可在飞机移动时提供航向修正: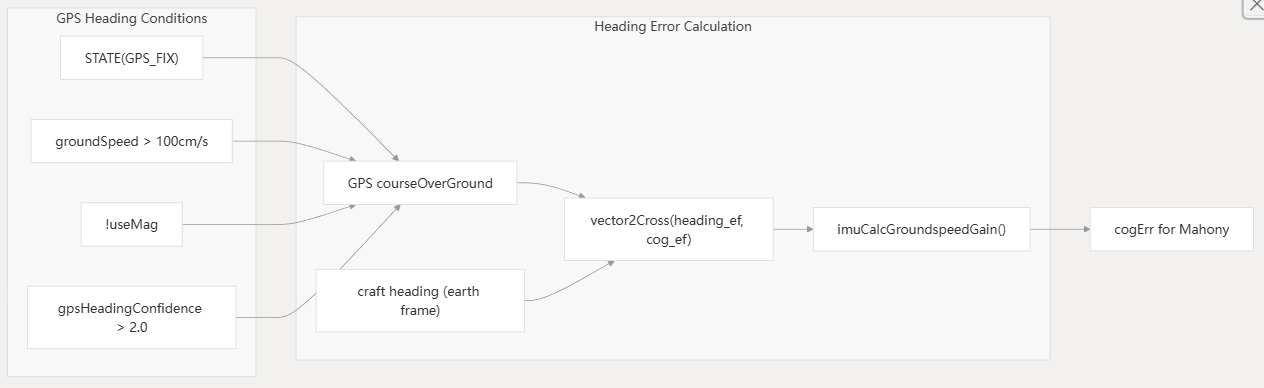
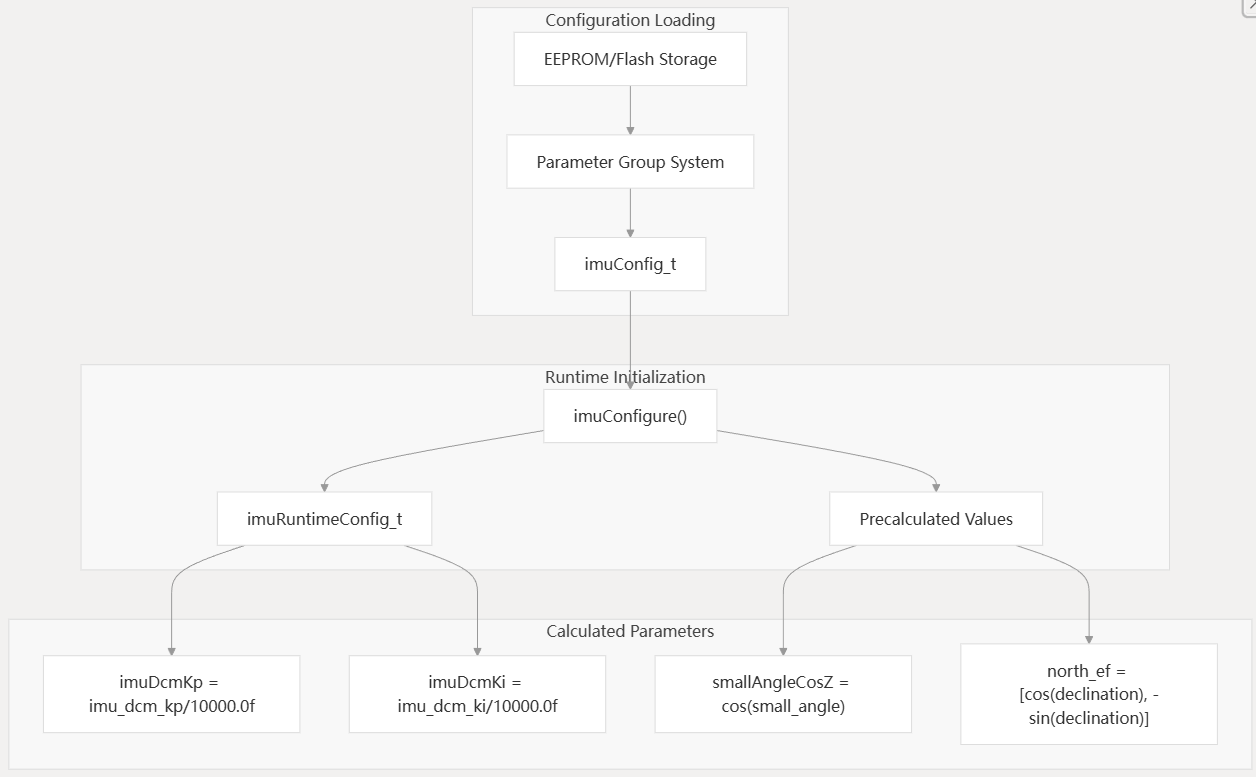
配置和运行时参数
IMU系统通过imuConfig_t参数组和运行时计算进行配置:
| 范围 | 默认 | 目的 | 单位 |
|---|---|---|---|
imu_dcm_kp | 2500 | 比例增益 × 10000 | 无量纲 |
imu_dcm_ki | 0 | 积分增益 × 10000 | 无量纲 |
small_angle | 25 | “水平”检测的角度限制 | 学位 |
mag_declination | 0 | 局部磁偏角 × 10 | 学位 |
与飞行控制集成
IMU系统向多个飞行控制子系统提供姿态数据:
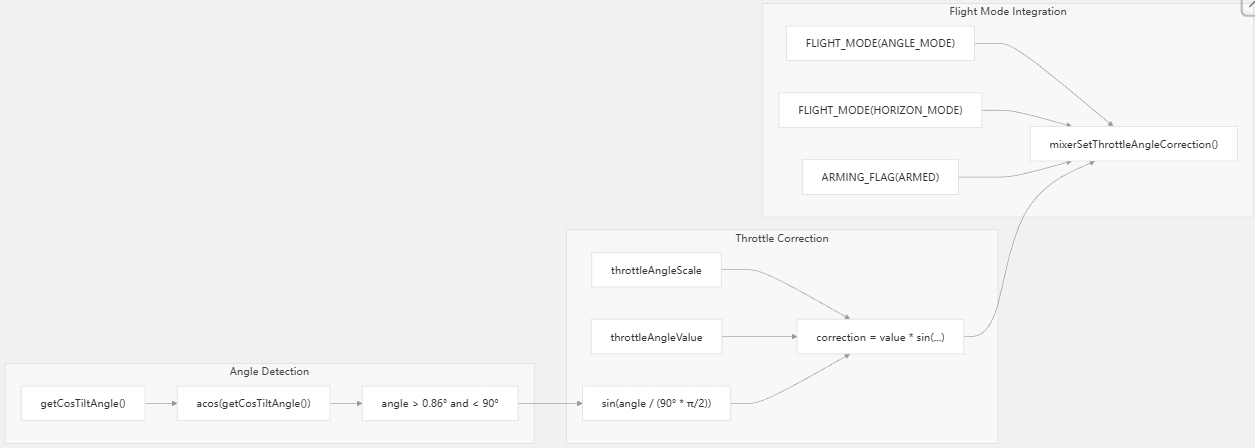
节气门角度修正
在角度模式和水平模式下,IMU 会计算倾斜姿态的油门补偿:
调试输出和监控
该系统提供实时调试信息,用于调优和分析:
DEBUG_SET(DEBUG_ATTITUDE, 0, attitude.values.roll);
DEBUG_SET(DEBUG_ATTITUDE, 1, attitude.values.pitch);
DEBUG_SET(DEBUG_ATTITUDE, 2, lrintf(groundspeedGain * 100.0f));
DEBUG_SET(DEBUG_ATTITUDE, 3, (headingErrCog * 100));
DEBUG_SET(DEBUG_ATTITUDE, 7, lrintf(dcmKpGain * 100.0f));
测试与仿真
IMU系统包含全面的单元测试和模拟器支持:
单元测试覆盖率
该测试套件验证核心数学运算和算法行为:
- 利用四元数计算旋转矩阵
- 从旋转矩阵中提取欧拉角
- Mahony AHRS 更新算法
- 小角度检测逻辑
- 坐标系变换
模拟器集成
对于软件在环(SITL)测试,IMU系统支持外部姿态注入:
#ifdef SIMULATOR_BUILD
void imuSetAttitudeRPY(float roll, float pitch, float yaw);
void imuSetAttitudeQuat(float w, float x, float y, float z);
#if defined(SIMULATOR_IMU_SYNC)
void imuSetHasNewData(uint32_t dt);
#endif
#endif
在多线程模拟器环境中,通过互斥锁来保证线程安全。


















 901
901

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









