




目的和范围
执行器输出系统负责将车辆控制指令转换为驱动电机、伺服机构和其他输出设备的物理执行器信号。该系统提供 PX4 控制算法与硬件执行器之间的最终接口,支持多种输出协议,包括传统的 PWM、现代 DShot 电调通信以及 PX4IO 板接口。
有关生成本系统处理指令的控制算法的信息,请参阅“车辆控制”部分。有关输出系统中使用的混合器框架的详细信息,请参阅下文所述的混合输出组件。
架构概述
执行器输出系统由三个主要驱动程序实现组成,它们共享一个通用接口:
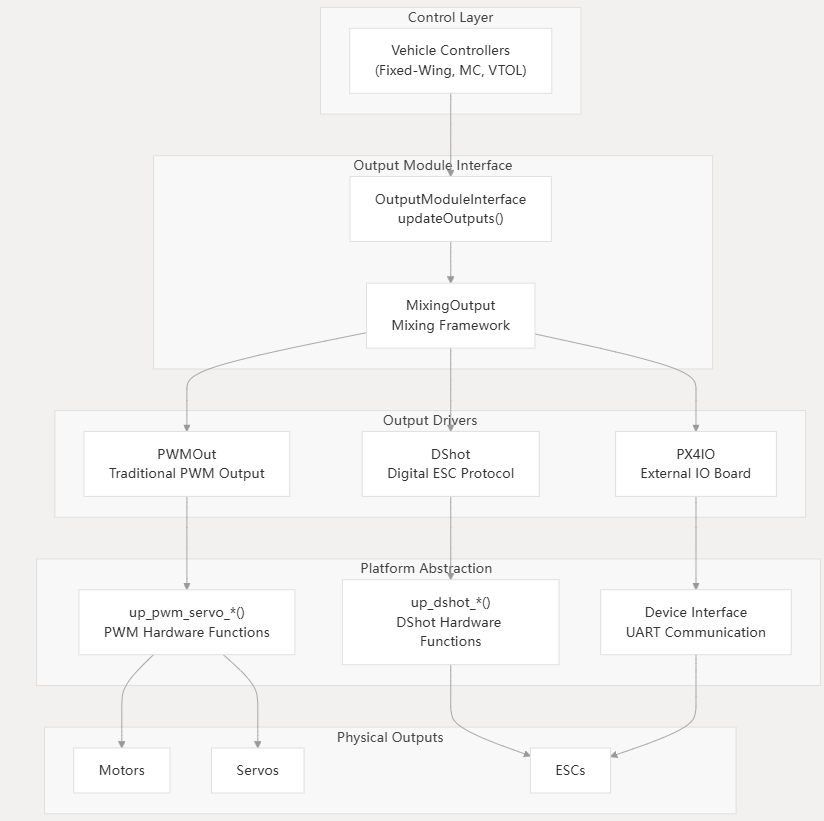
输出模块接口
所有执行器输出驱动程序都实现了该接口OutputModuleInterface,该接口为接收控制命令和管理执行器输出提供了标准化的接口。
核心接口方法
接口中的关键方法是updateOutputs()接收一个输出值数组并将其应用于物理执行器:
| 方法 | 目的 | 执行 |
|---|---|---|
updateOutputs() |
将控制值应用于执行器 | 混合输出框架调用 |
updateSubscriptions() |
更新 uORB 订阅 | 管理控制主题订阅 |
mixerChanged() |
处理混音器配置更改 |
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 598
598

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









