




本文档介绍了PX4的Gazebo仿真框架,重点阐述了其与Gazebo Garden(Gazebo的最新版本)的集成。该系统提供软件在环(SITL)仿真功能,用于测试和开发PX4自动驾驶仪的功能。
架构概述
PX4的Gazebo仿真系统以该模块为核心构建GZBridge,该模块充当PX4自动驾驶仪和Gazebo Garden模拟器之间的通信桥梁。该系统支持多种车辆类型和传感器配置。
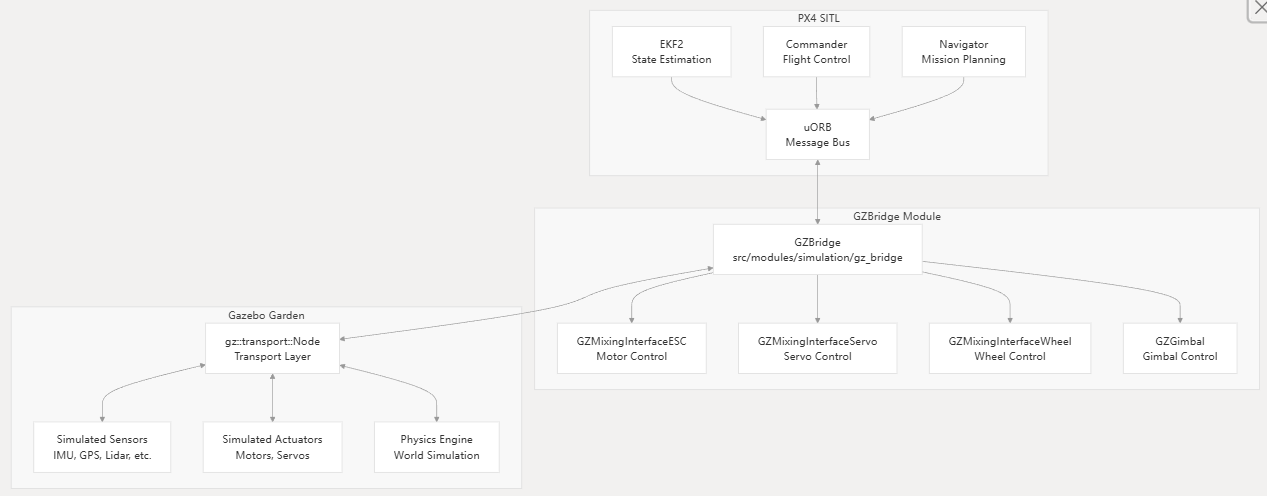
Gazebo仿真架构概述
GZBridge组件
该类GZBridge作为 PX4 和 Gazebo Garden 之间的主要接口。它实现了一个以 100Hz 频率运行的计划工作项,用于处理双向通信。
核心功能
这座桥梁具有以下几个关键功能:
| 功能 | 描述 | 执行 |
|---|---|---|
| 传感器数据采集 | 订阅 Gazebo 传感器主题并发布到 uORB | GZBridge.cpp192-329 |
| 执行器命令输出 | 接收来自 uORB 的执行器命令并发送到 Gazebo | GZBridge.cpp136-157 |
| 时钟同步 |
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1096
1096

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









