




该仿真测试系统为PX4提供软件在环(SITL)仿真功能,无需物理硬件即可开发、测试和验证飞行控制算法。该系统支持多种仿真后端,包括Gazebo、Gazebo Classic、jMAVSim、FlightGear以及内置的硬件仿真(SIH)模拟器。
有关编译模拟目标的构建系统的信息,请参阅“构建系统”部分。
仿真架构概述
该仿真系统包括仿真器后端选择、传感器数据桥接、执行器输出处理和真实数据生成:
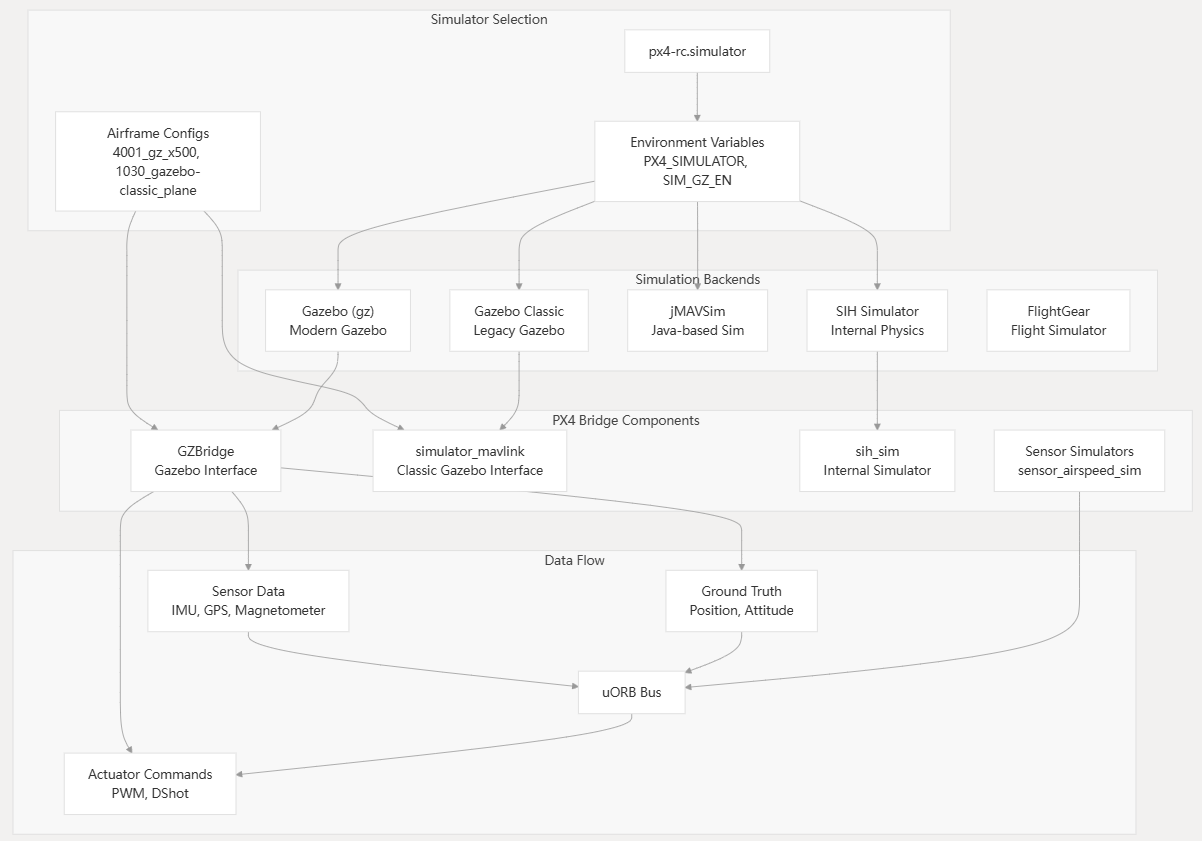
模拟器选择和启动
该仿真系统使用分层启动脚本,根据环境变量和参数选择合适的仿真器后端:
| 环境变量 | 范围 | 模拟器后端 | 桥接模块 |
|---|---|---|---|
PX4_SIMULATOR=gz |
SIM_GZ_EN=1 |
现代凉亭 | gz_bridge |
PX4_SIMULATOR=sihsim |
SYS_AUTOSTART=0 |
SIH内部 | sih_sim |
PX4_SIM_MODEL=jmavsim_iris |
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 721
721

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









