






 本文介绍了如何使用rosbaginfo检查bag文件中imu数据的完整性和rostopicecho工具转换特定topic的消息至txt文件。作者还提到未能在转换中看到磁力计信息。最后,展示了rosbagplay用于查看实时话题信息的过程。
本文介绍了如何使用rosbaginfo检查bag文件中imu数据的完整性和rostopicecho工具转换特定topic的消息至txt文件。作者还提到未能在转换中看到磁力计信息。最后,展示了rosbagplay用于查看实时话题信息的过程。
1.rosbag info 查看bag消息
rosbag info --.bag
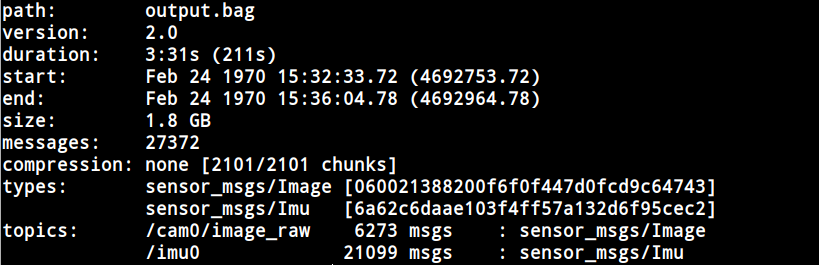
topics是其中的话题内容,/imu中只写了包含imu的数据,但是imu是9轴的,到底磁力计信息是否包含在其中呢?
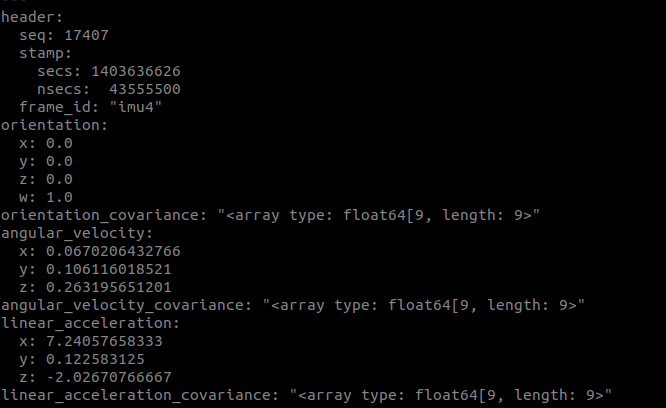
2.将bag中的某个话题转为txt
将file_name.bag文件中topic_name话题的消息转换到Txt_name.txt文件中:
rostopic echo -b file_name.bag -p /topic_name > Txt_name.txt
可以看出其中并没有磁力计信息
3.rostopic echo /topic
查看换题话题的信息
先rosbag play一个包,将话题投到roscore中,然后用echo查看


















 1357
1357

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









