







 本文介绍了如何使用rosbaginfo命令查看.bag文件中的话题信息,并通过rosrunpcl_rosbag_to_pcd工具将点云数据转换为.pcd文件。具体步骤包括确定点云话题名称,然后运行转换命令生成每一帧的点云数据文件。
本文介绍了如何使用rosbaginfo命令查看.bag文件中的话题信息,并通过rosrunpcl_rosbag_to_pcd工具将点云数据转换为.pcd文件。具体步骤包括确定点云话题名称,然后运行转换命令生成每一帧的点云数据文件。
1、.bag数据信息的查看
rosbag info *.bag //*为你自己的数据包的名称
详细解释查看这篇博文
2、 解析.bag文件得到带时间戳的.pcd点云数据文件
rosrun pcl_ros bag_to_pcd test.bag /points_raw ./pcd
这个语句需要点云的话题名字
首先使用bag信息查看bag文件的话题名
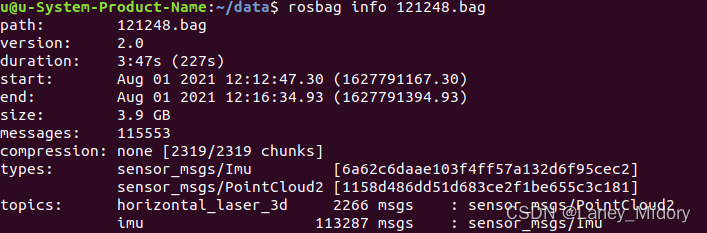 在这里点云的话题名字为horizontal_laser_3d
在这里点云的话题名字为horizontal_laser_3d
因此我这里的输出语句为
rosrun pcl_ros bag_to_pcd 121248.bag horizontal_laser_3d ./pcd
可以输出每一帧的pcd文件进行查看



















 2163
2163





 到【灌水乐园】发言
到【灌水乐园】发言









