1 激光雷达运动畸变
- 1)激光帧产生畸变的根源:
每个激光点都具有不同的基准位姿。 - 2)产生的原因:
激光测量时伴随机器人的运动,激光点的数据不是瞬时获得的,当激光帧率较低时,机器人运动带来的激光帧运动畸变不能忽略。(如5Hz的激光雷达,一帧激光的首尾时间差为200ms,如果机器人转速为1.57rad/s,那么首尾激光点基准坐标系位姿误差将达到18度)
2 去除畸变原理
- 去除激光帧畸变原理:把一帧激光的每个激光点坐标变换到不同时刻的机器人里程计上
- 里程计辅助方法:imu、轮式里程计
- 1)IMU
直接测量获得角速度和线速度,但对于机器人位移和角度需要积分
更新速度高1khz-8khz
具有较高的角速度测量精度,但线加速度精度差 - 2)轮式里程计
更新速度高100-200Hz
(一般机器人轮式里程计200hz,即可认为满足一定的要求,200hz一帧5ms,1.57rad/s下,误差仅为0.45度,可认为机器人没有运动。)
3 程序流程
1) main-构造函数
订阅scan话题
调用scancallback处理
2) scancallback
scan话题数据提取到vector数组(包括angles,ranges)
vector数组保存到pcl::PointCloud<plc::PointXYZRGB>类型的点云中
调用Lidar_Calibration进行畸变矫正
3) Lidar_Calibration
程序对激光雷达数据进行分段线性插值*****
调用Lidar_MotionCalibration激光雷达运动畸变去除分段函数*****
调用getLaserPose得到激光雷达在odom中的位姿
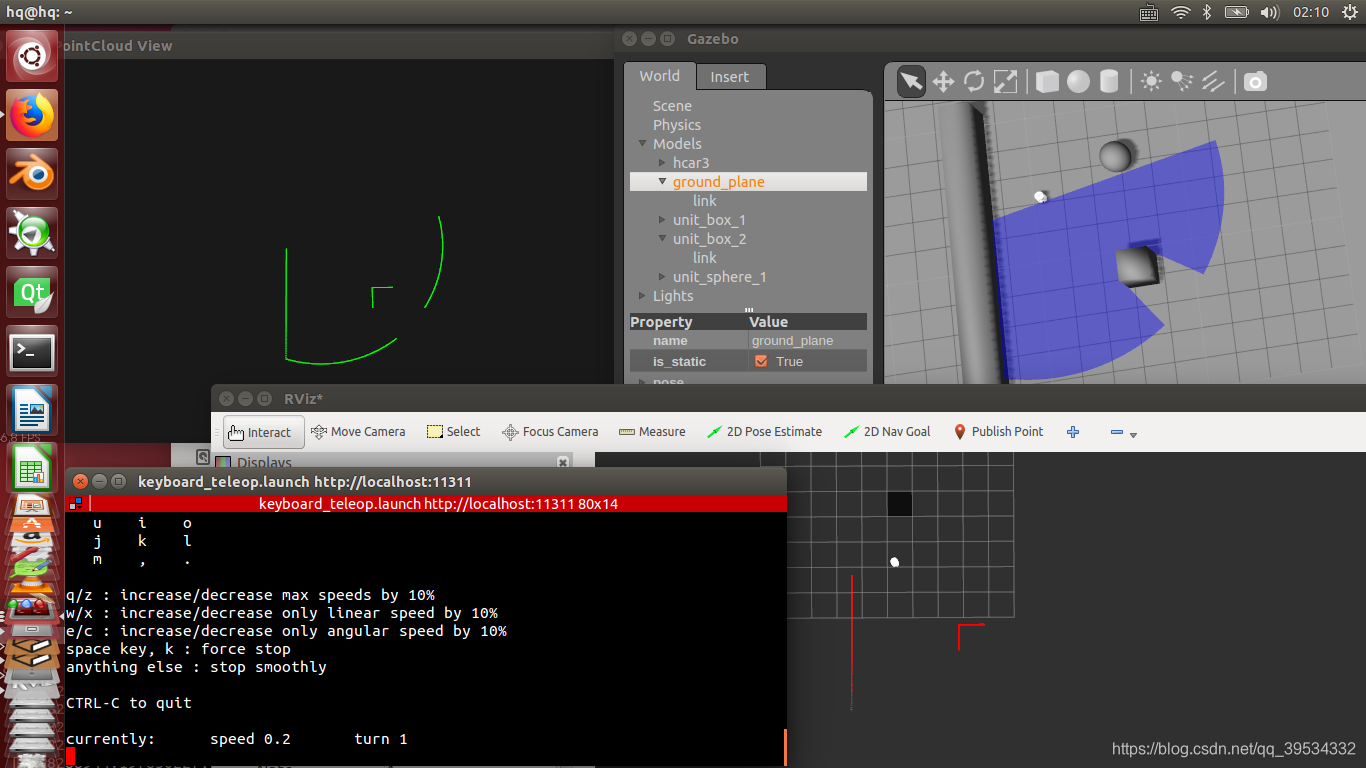
4 程序实现显示
- scan使用ros话题显示
- 校正后的使用pcl_viewer显示
(后续可以把pcl改为话题发布,这样数据一块显示可以作比较)





 博客介绍了激光雷达运动畸变相关内容。激光帧产生畸变是因每个激光点基准位姿不同,且激光测量时机器人运动、帧率低会带来畸变。去除畸变原理是将激光点坐标变换到不同时刻的机器人里程计上,可借助IMU和轮式里程计,还提及程序流程及显示方式。
博客介绍了激光雷达运动畸变相关内容。激光帧产生畸变是因每个激光点基准位姿不同,且激光测量时机器人运动、帧率低会带来畸变。去除畸变原理是将激光点坐标变换到不同时刻的机器人里程计上,可借助IMU和轮式里程计,还提及程序流程及显示方式。

















 38
38

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









