







 博客探讨了激光数据与地图重合度的观测模型评估,强调了高斯核在处理环境模糊中的作用,使得机器人位姿变化对期望值的影响减小。同时,文章指出了运动畸变在激光帧率低时的问题,并提出 VICP 方法作为优化手段,通过速度估计减少累积误差。此外,还介绍了位姿的线性插值技术,用于匹配激光点和位姿。
博客探讨了激光数据与地图重合度的观测模型评估,强调了高斯核在处理环境模糊中的作用,使得机器人位姿变化对期望值的影响减小。同时,文章指出了运动畸变在激光帧率低时的问题,并提出 VICP 方法作为优化手段,通过速度估计减少累积误差。此外,还介绍了位姿的线性插值技术,用于匹配激光点和位姿。


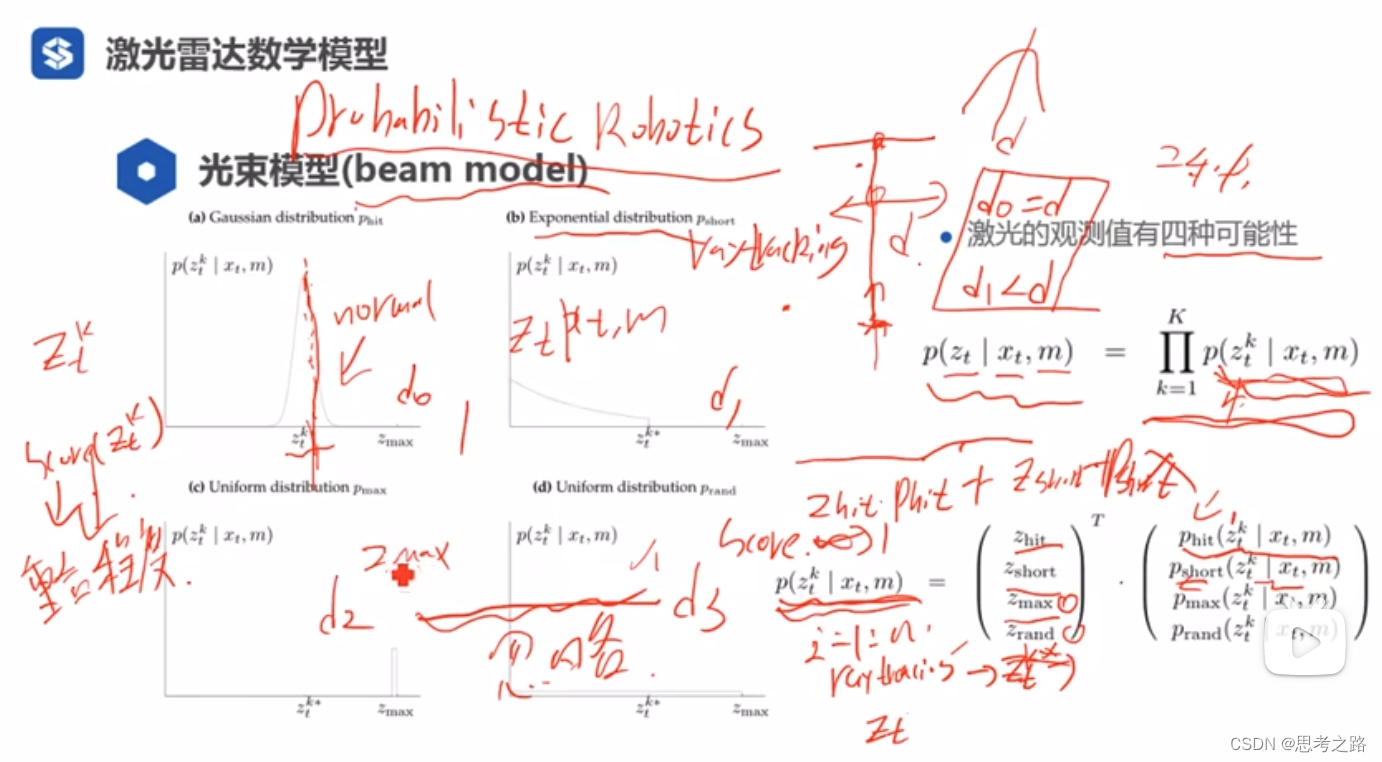
观测模型评估的是激光数据根地图的重合程度是多少。上述四种光束模型的组合结果如下:
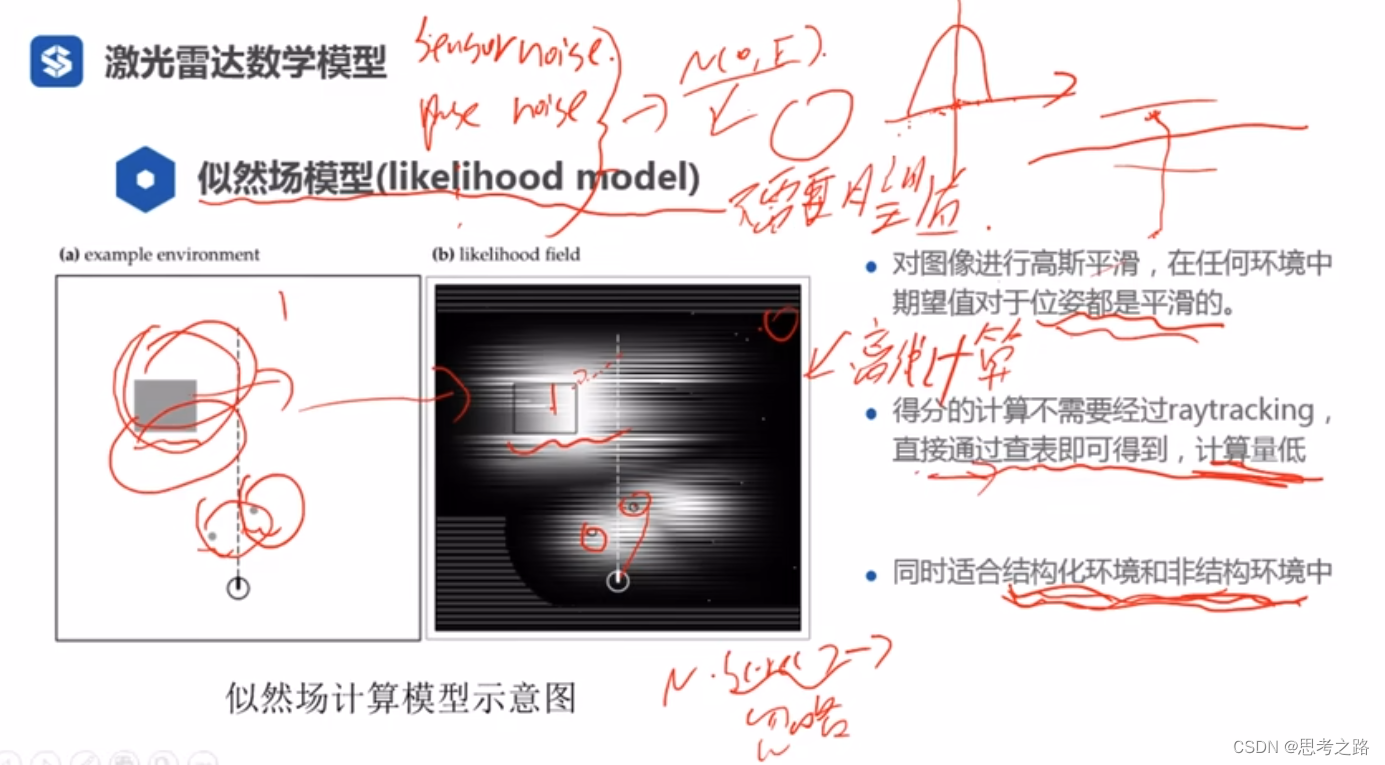
使用高斯核对环境进行高斯模糊后,机器人微小的位姿变化不会造成期望值发生突变,使其能进行优化还能找到次优解。
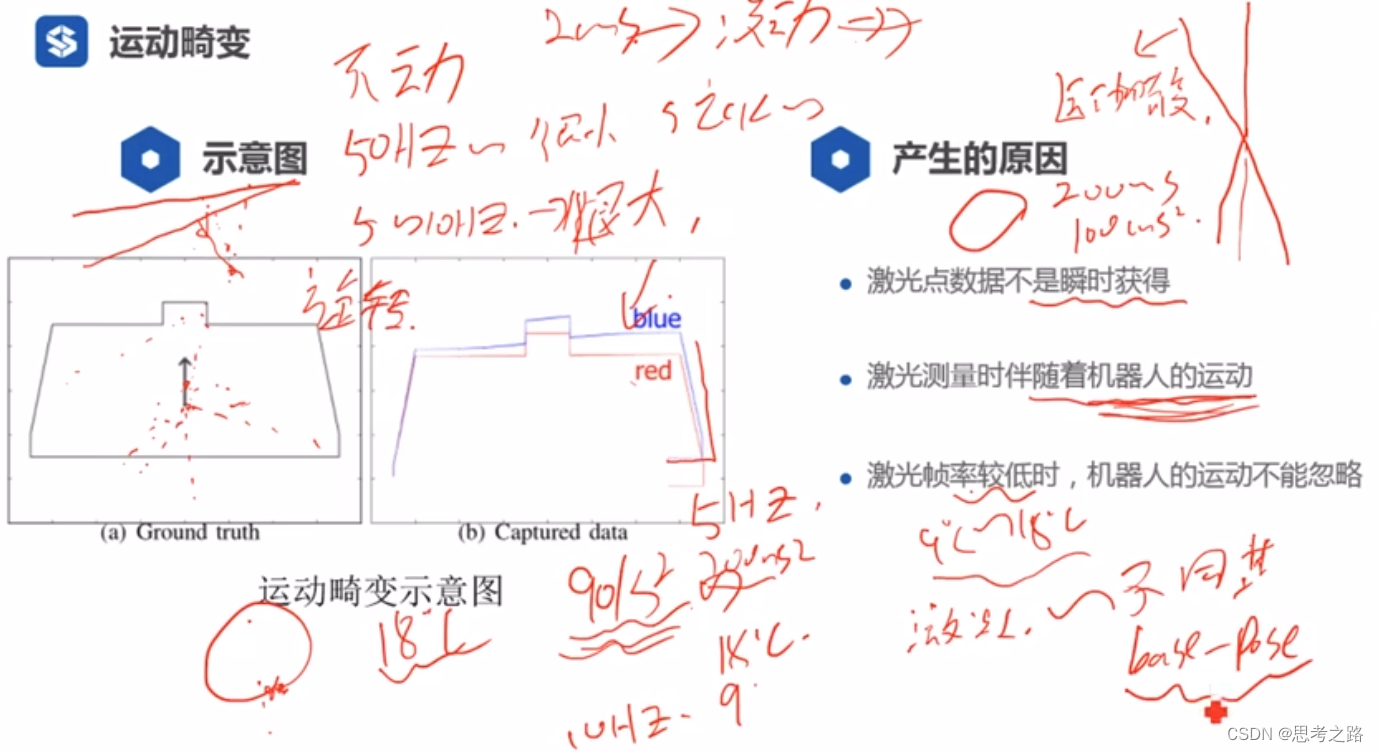
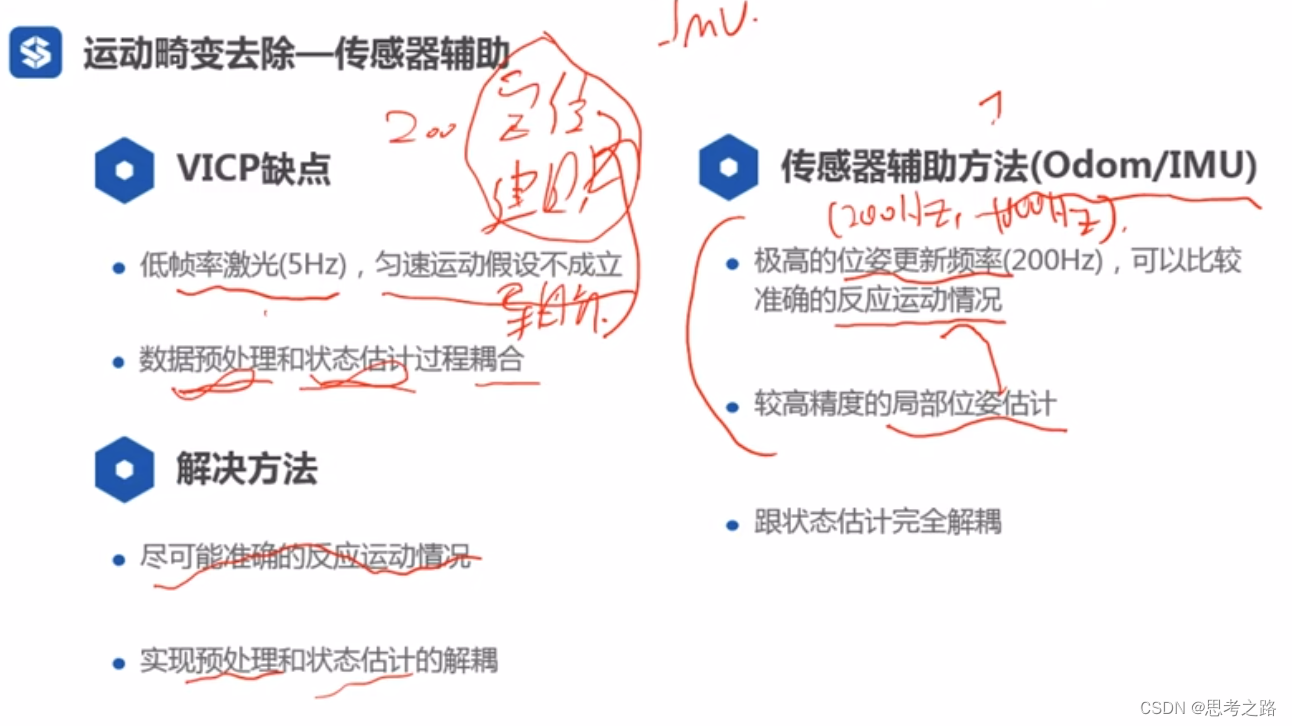
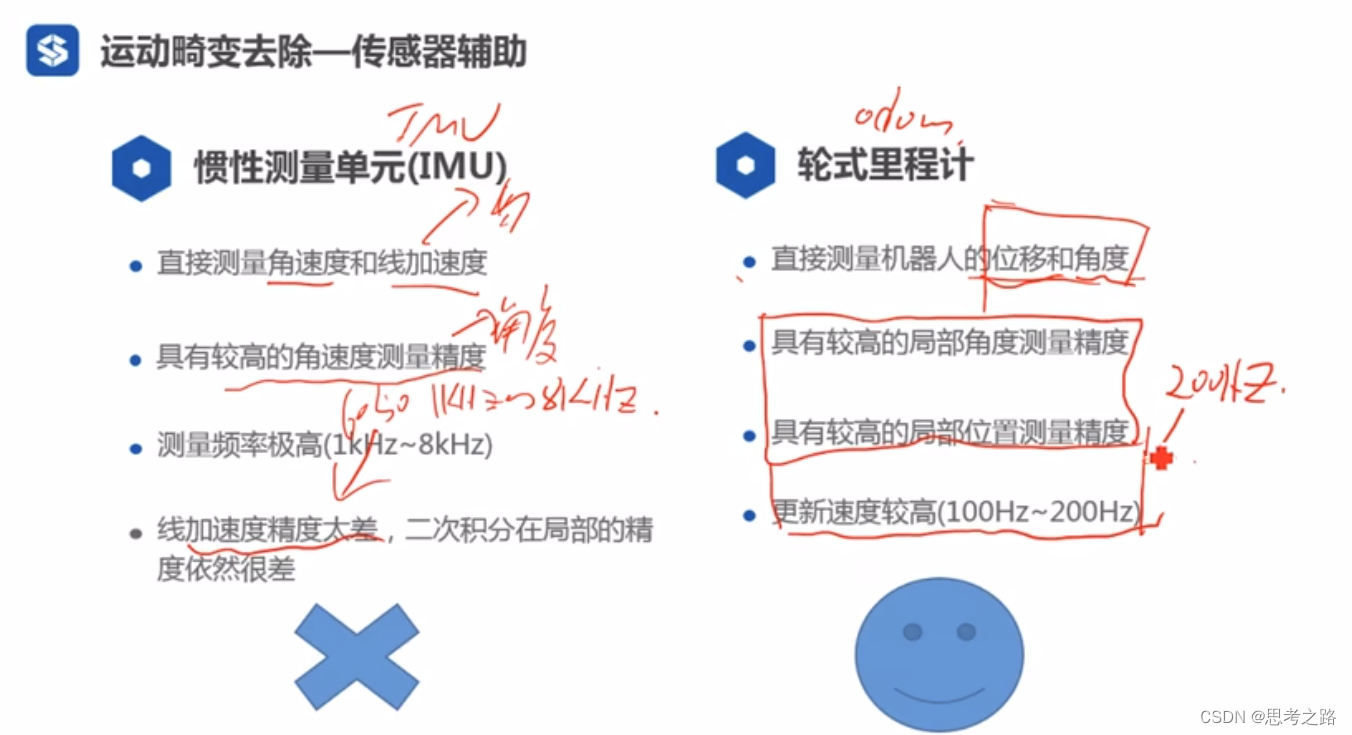
运动畸变的来源:每一个激光点都有不同的基准位姿,但是我们处理的时候认为所有的激光点都是同一基准位姿,帧率很高的时候可以认为是同一位姿,2ms的段时间内机器人运动很小可以忽略,但当激光帧率很低时,就不能这样认为了。针对运动畸变的来源接下来我们将介绍如何对畸变进行去除。
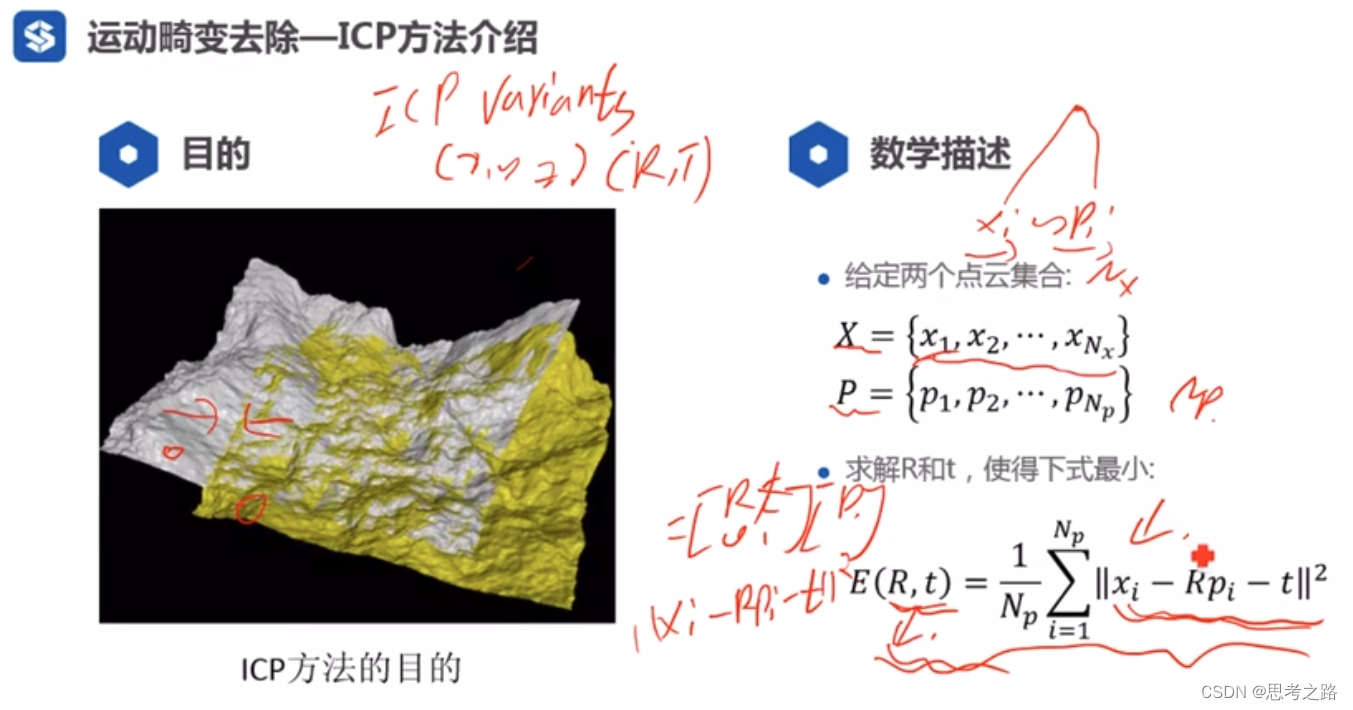
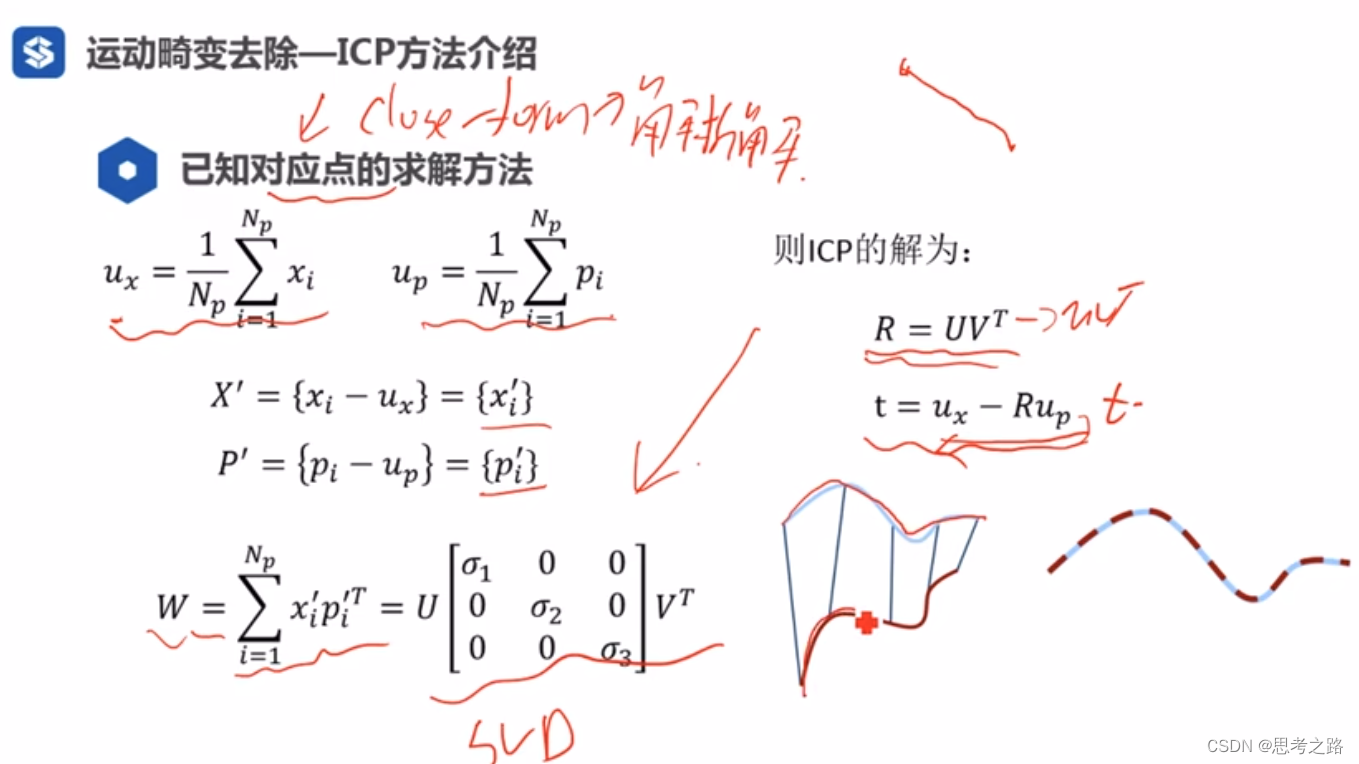
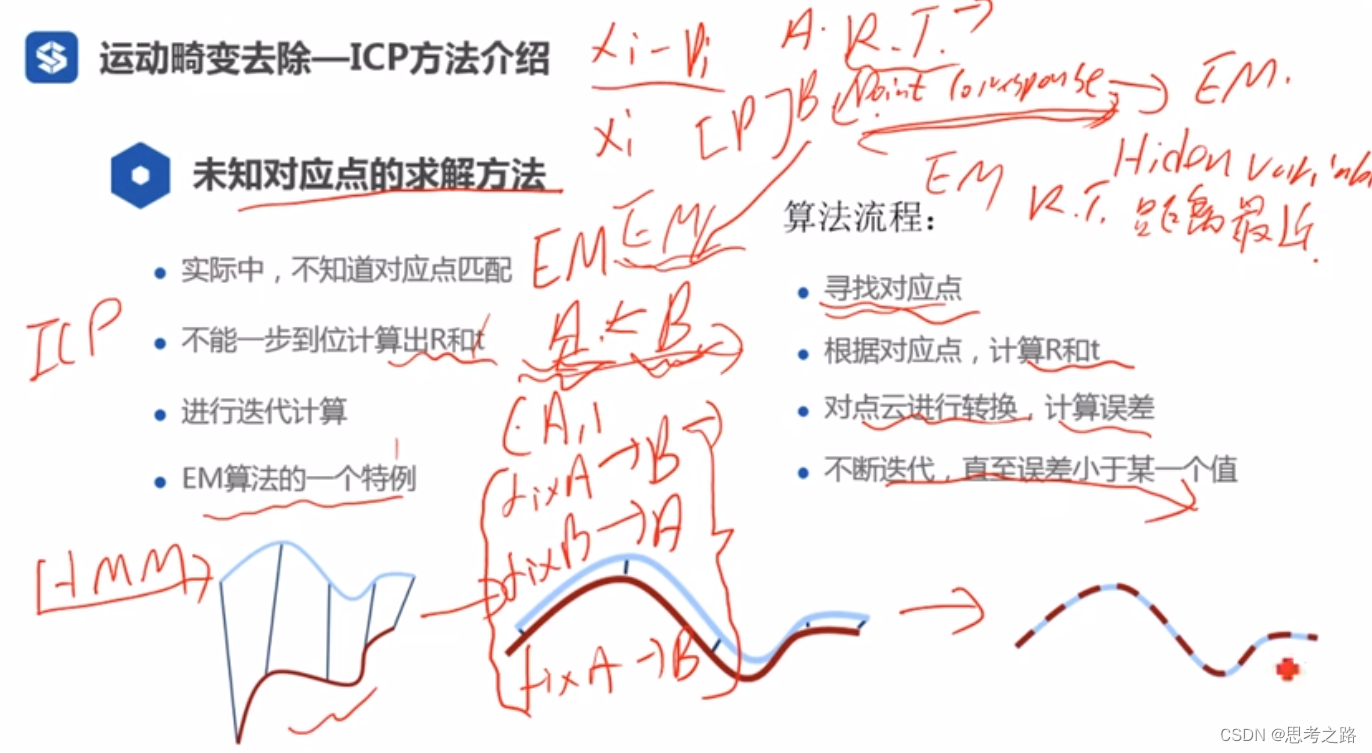
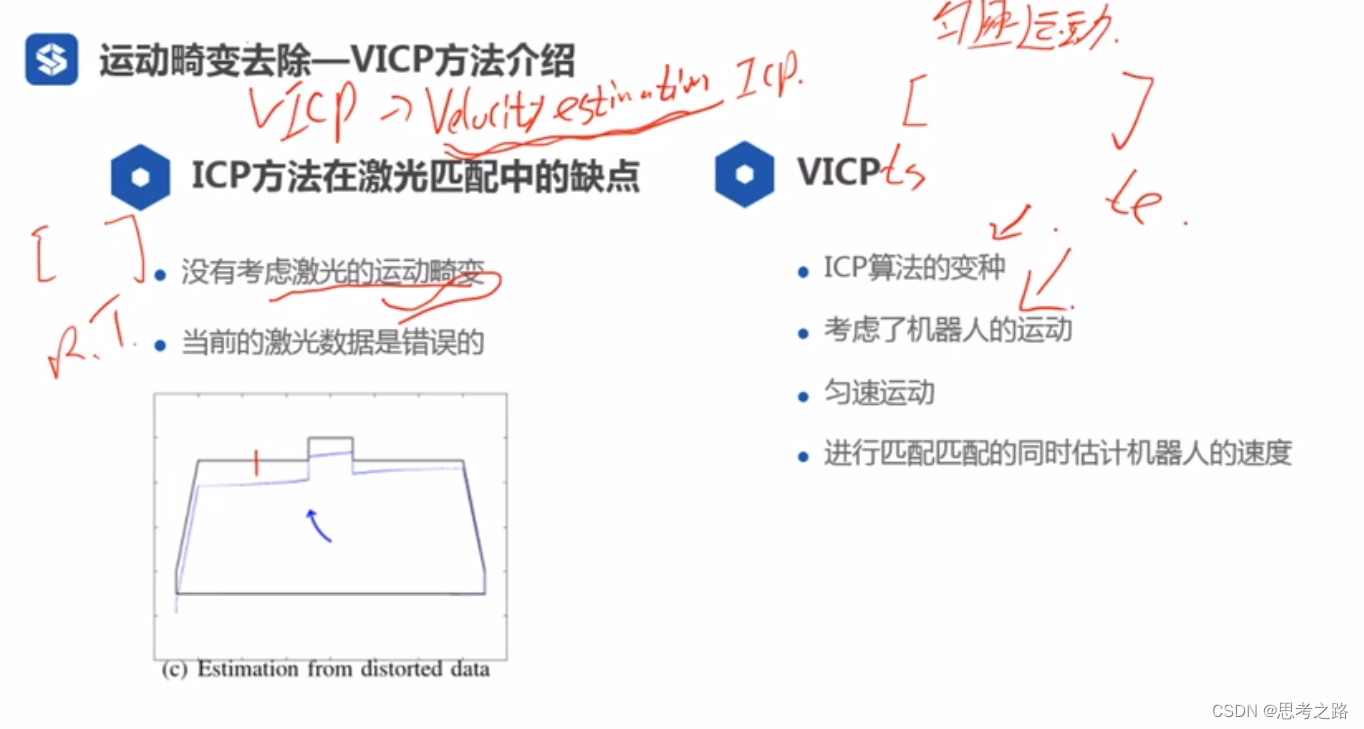
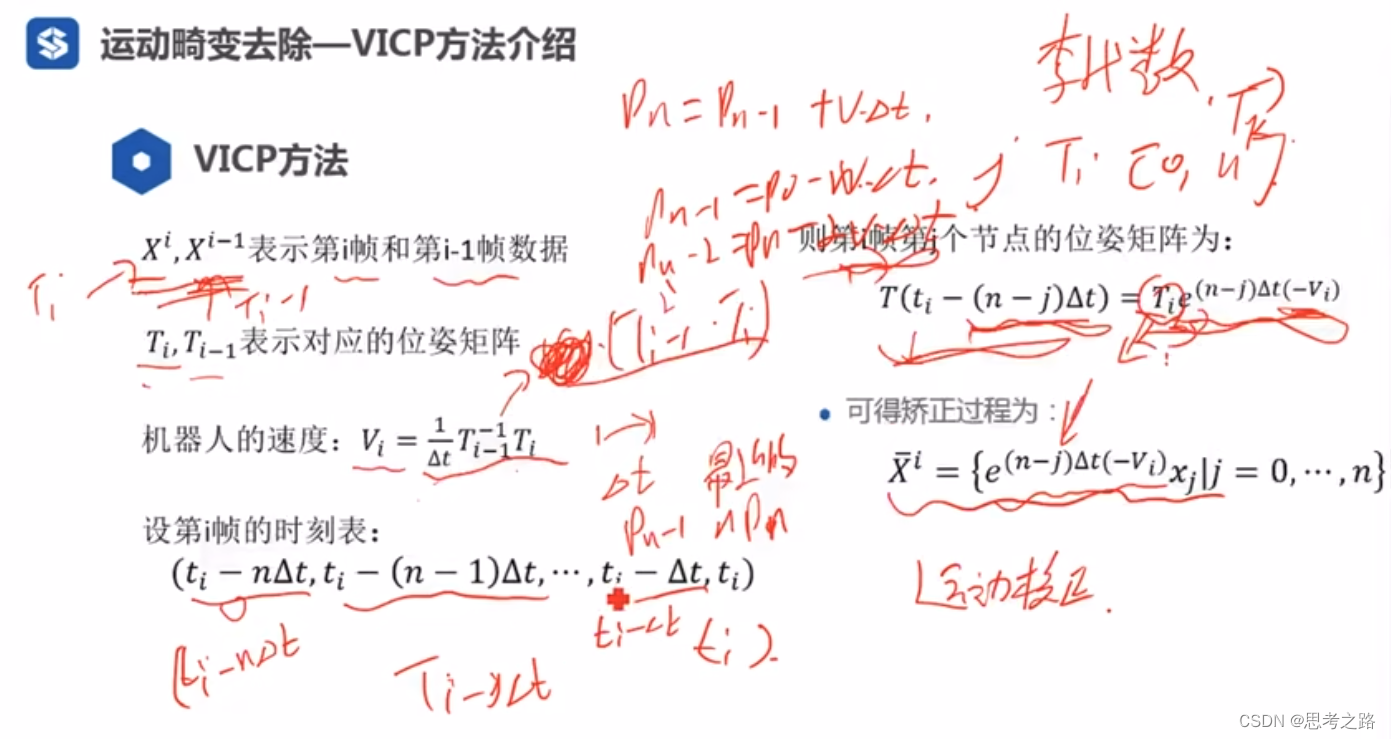
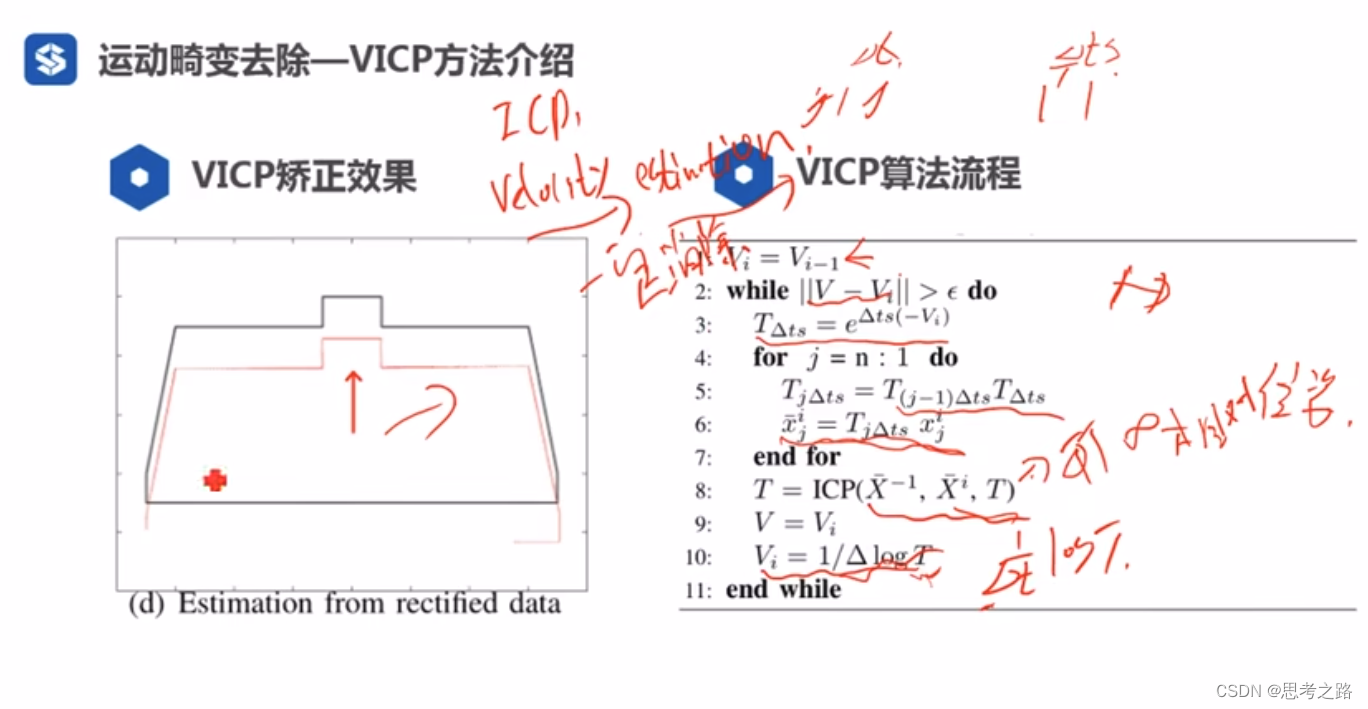
VICP:在ICP的同时进行速度估计,以期望速度估计一定的消除累积误差。
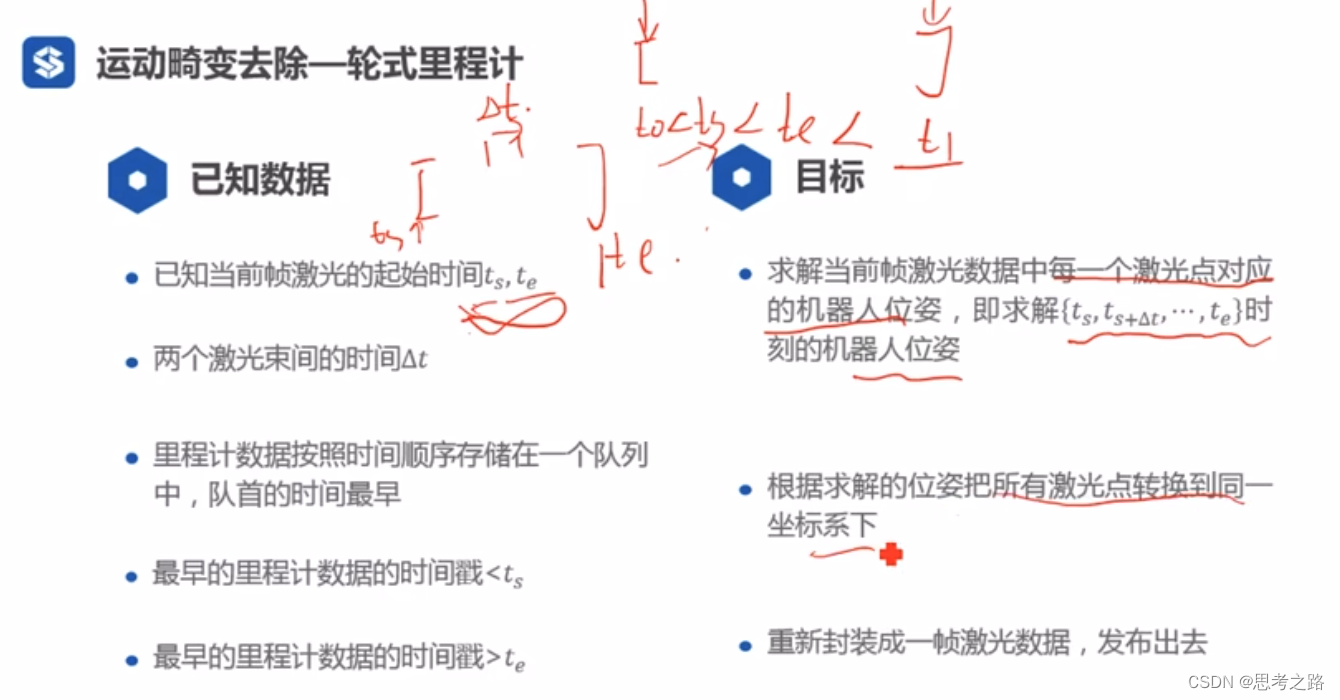
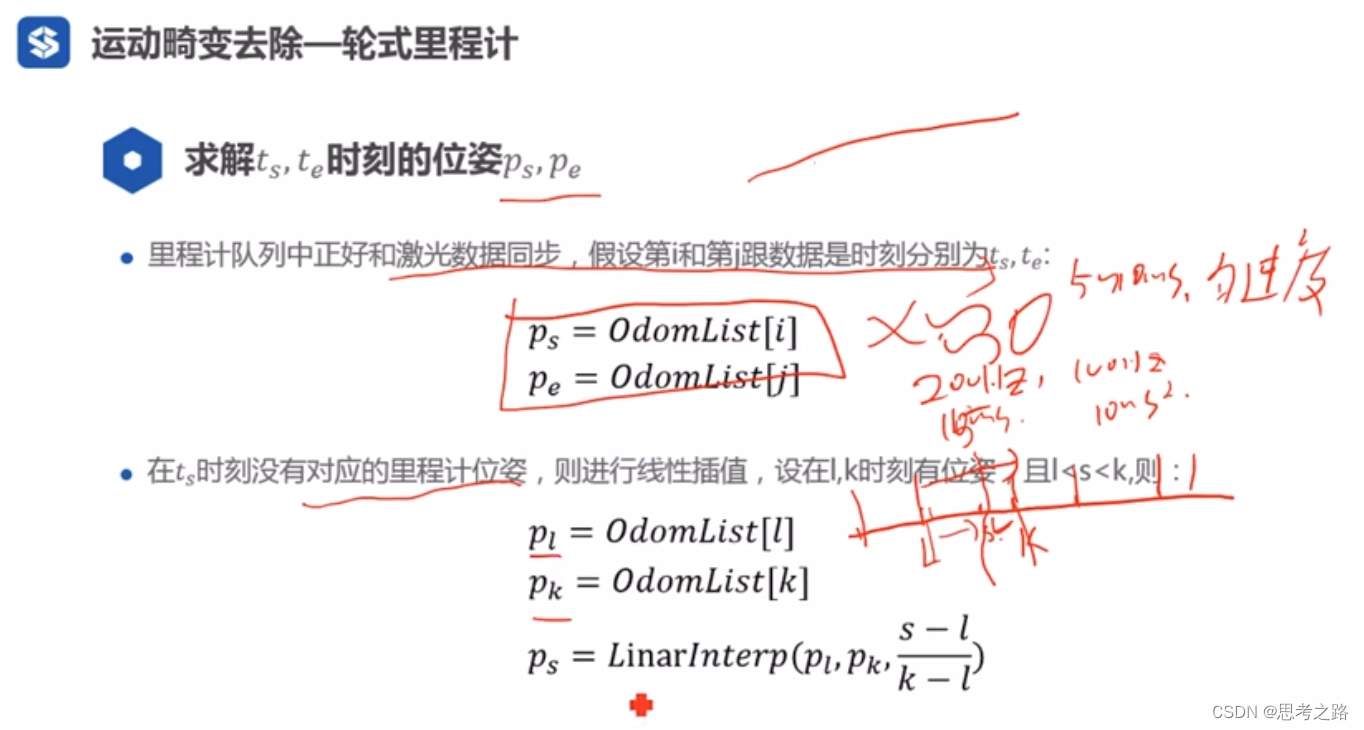
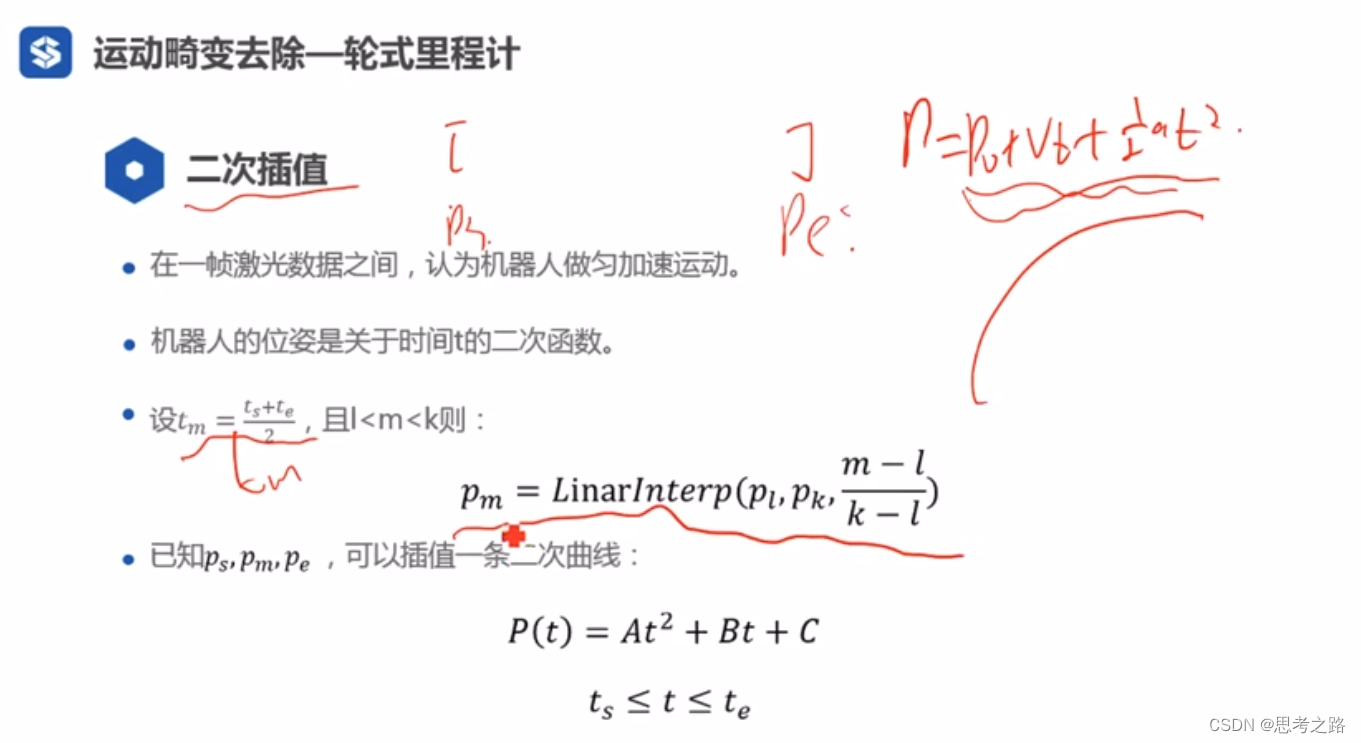
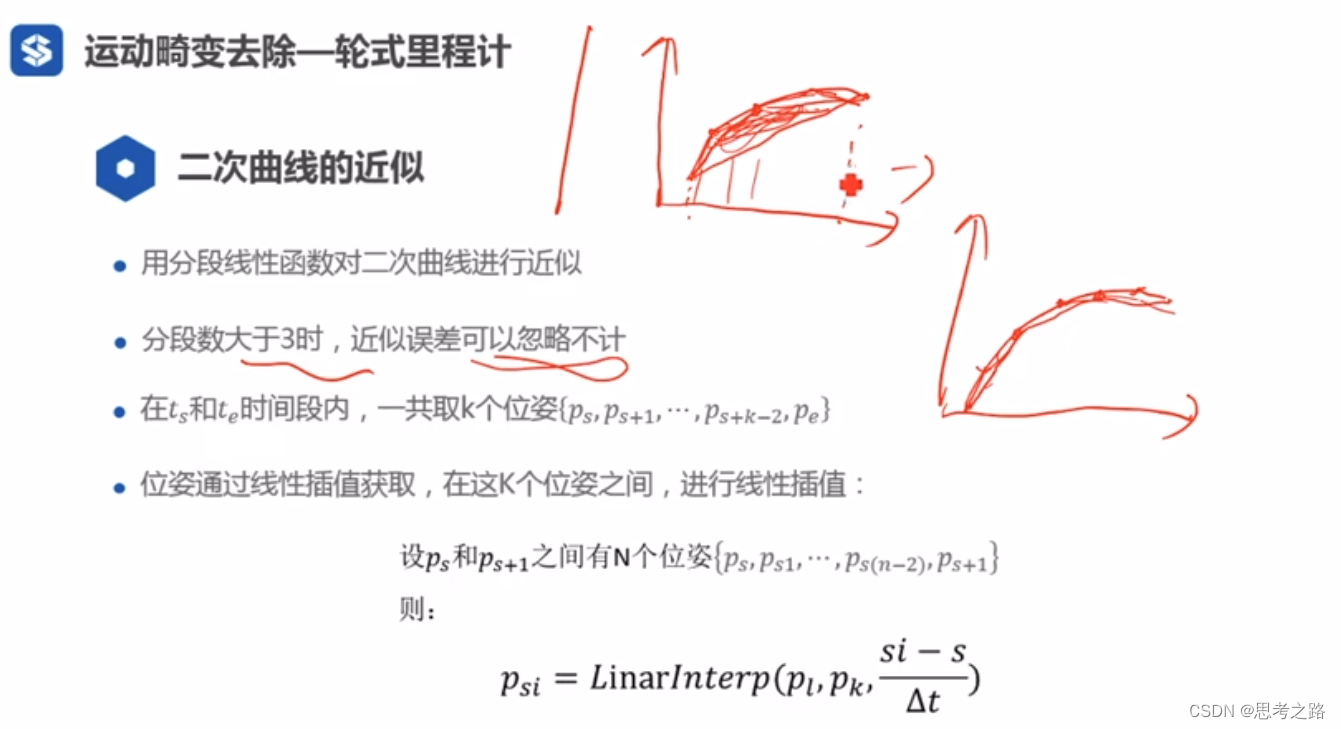
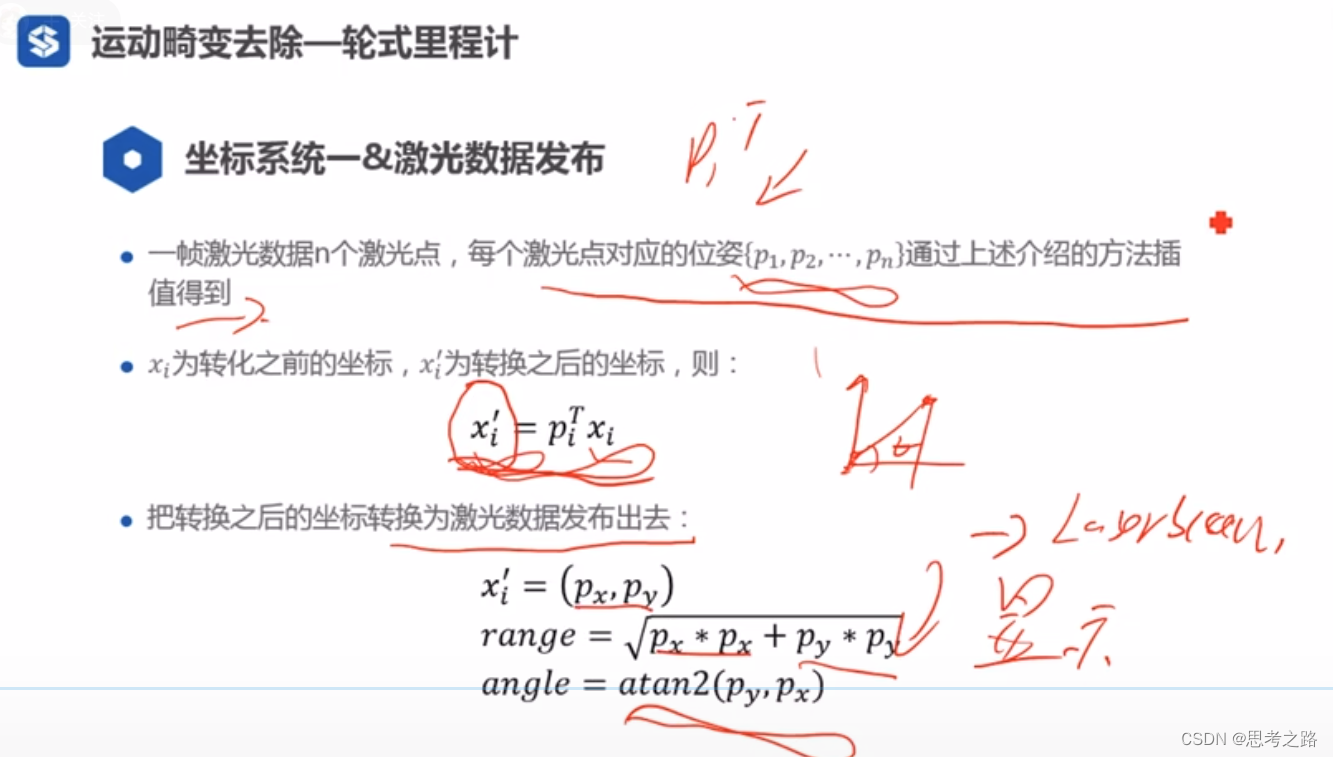
位姿通过线性插值获取,在这K个位姿之间,再进行线性插值,第一个插值表示在里程计队列的数据间进行插值,使得激光点ts有对应的位姿,第二个插值指在得到的两个位姿间进行插值为每一个激光点分配位姿。

















评论

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
查看更多评论
添加红包








