







BSP树(Binary Space Partitioning Trees)
BSP树(二叉空间分割树)是一种重要的空间数据结构,广泛应用于计算机图形学,尤其是在可见性判定和场景渲染中。它通过递归地将空间划分为多个凸面体,帮助实现高效的渲染和可见性管理。
1. BSP树的基本结构
BSP树是一棵二叉树,每个节点代表一个超平面(hyperplane),该超平面将空间划分为两个部分:前向(front)和背向(back)。具体结构如下:
- 节点:每个节点包含一个超平面,该超平面将空间分为两个子空间。
- 左子树:表示与超平面同侧的空间(前向空间)。
- 右子树:表示与超平面相对侧的空间(背向空间)。
这种结构使得BSP树能够有效地管理和组织场景中的几何体。
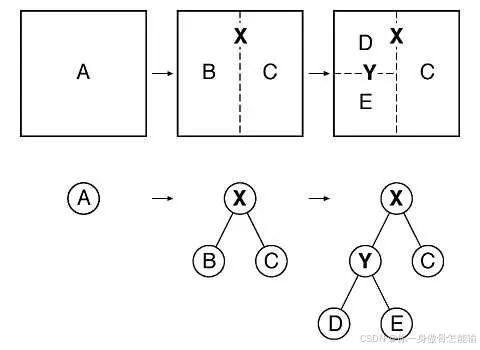
图4 一个BSP树的构造
2. BSP树的构建
构建BSP树的过程通常包括以下步骤:
- 选择超平面:从场景中的几何体中选择一个超平面,通常选择一个多边形的平面。
- 划分几何体:根据选定的超平面,将场景中的几何体划分为前向和背向两部分。
- 递归构建:对前向和背向的几何体分别递归构建BSP树,直到满足停止条件(如没有更多的几何体可划分)。
- 存储信息:在每个节点中存储超平面和与该超平面相交的几何体的信息。
3. BSP树的优点
- 可见性管理:BSP树能够有效地管理场景中的可见性,特别是在复杂场景中,可以快速判断哪些物体是可见的。
- 后向渲染:BSP树支持从后向前渲染物体,适合处理透明物体的渲染。
- 灵活性:BSP树可以处理任意形状的几何体,适用于多种场景。
4. BSP树的应用
- 游戏开发:BSP树在早期的3D游戏(如《Doom》)中被广泛使用,用于管理场景的可见性和渲染顺序。
- CAD系统:在计算机辅助设计(CAD)中,BSP树用于处理复杂的几何体和可视化。
- 虚拟现实:在虚拟现实应用中,BSP树可以帮助管理场景的可见性,提高渲染效率。
5. BSP树的挑战与局限性
尽管BSP树在许多应用中表现出色,但也存在一些挑战和局限性:
- 构建复杂性:构建BSP树的过程可能会非常复杂,尤其是在处理大量几何体时,可能导致性能瓶颈。
- 动态场景更新:在动态场景中,BSP树的更新可能会非常耗时,尤其是当场景中的几何体频繁变化时。
- 内存消耗:BSP树可能会占用较多的内存,尤其是在处理复杂场景时。
6. 未来发展方向
尽管BSP树在现代图形学中的使用有所减少,但其基本思想仍然对许多新技术有启发。未来的研究可能集中在以下几个方向:
- 结合其他数据结构:将BSP树与其他空间数据结构(如BVH)结合,以提高性能和灵活性。
- 动态更新算法:开发高效的动态更新算法,以适应不断变化的场景。
- 机器学习优化:利用机器学习技术优化BSP树的构建和查询过程,提高效率。
结论
BSP树作为一种经典的空间数据结构,在可见性管理和场景渲染中发挥了重要作用。尽管在现代图形学中面临一些挑战,但其基本原理和方法仍然具有重要的参考价值。随着技术的不断进步,BSP树的应用和优化仍将是一个活跃的研究领域。
BSP树的构造过程
构造BSP树的过程可以分为几个关键步骤,主要是通过递归地将空间划分为前向和背向两个部分,并将几何体(面片)插入到相应的子树中。以下是构造BSP树的详细步骤:
1. 初始化
- 开始时,创建一个空的BSP树。
2. 插入面片
- 选择面片:从待插入的面片集合中选择一个面片作为当前节点。
- 遍历树:从树的根节点开始遍历,进行以下操作:
3. 遍历与插入逻辑
-
当前节点为空:
- 如果当前节点为空,直接将新面片插入为该节点。
-
新面片与当前节点面片相交:
- 如果新面片与当前节点的面片相交,则需要将新面片分割成两个部分:
- 前向面片:与当前节点面片同侧的部分。
- 背向面片:与当前节点面片相对侧的部分。
- 将前向面片插入当前节点的左子树,将背向面片插入当前节点的右子树。
- 如果新面片与当前节点的面片相交,则需要将新面片分割成两个部分:
-
新面片在当前节点的前向空间:
- 如果新面片完全位于当前节点的前向空间(即与当前节点面片同侧),则将新面片插入当前节点的左子树。
-
新面片在当前节点的背向空间:
- 如果新面片完全位于当前节点的背向空间(即与当前节点面片相对侧),则将新面片插入当前节点的右子树。
4. 递归插入
- 对于每个新插入的面片,重复上述遍历与插入逻辑,直到所有面片都被插入到BSP树中。
5. 完成构建
- 当所有面片都被插入后,BSP树的构建过程完成。
示例
假设我们有一组面片需要构建BSP树,以下是一个简单的示例:
- 选择第一个面片作为根节点。
- 插入第二个面片:
- 检查与根节点的相交情况。
- 如果相交,则分割成前向和背向面片,并分别插入左子树和右子树。
- 继续插入其他面片,重复上述步骤,直到所有面片都被处理。
总结
构造BSP树的核心在于通过递归地将空间划分为前向和背向两个部分,并将面片分类到相应的子树中。通过这种方式,BSP树能够有效地管理场景中的几何体,为后续的可见性判定和渲染提供支持。尽管构建过程可能会比较复杂,但一旦构建完成,BSP树在处理可见性和渲染顺序方面具有显著的优势。
BSP树的遍历
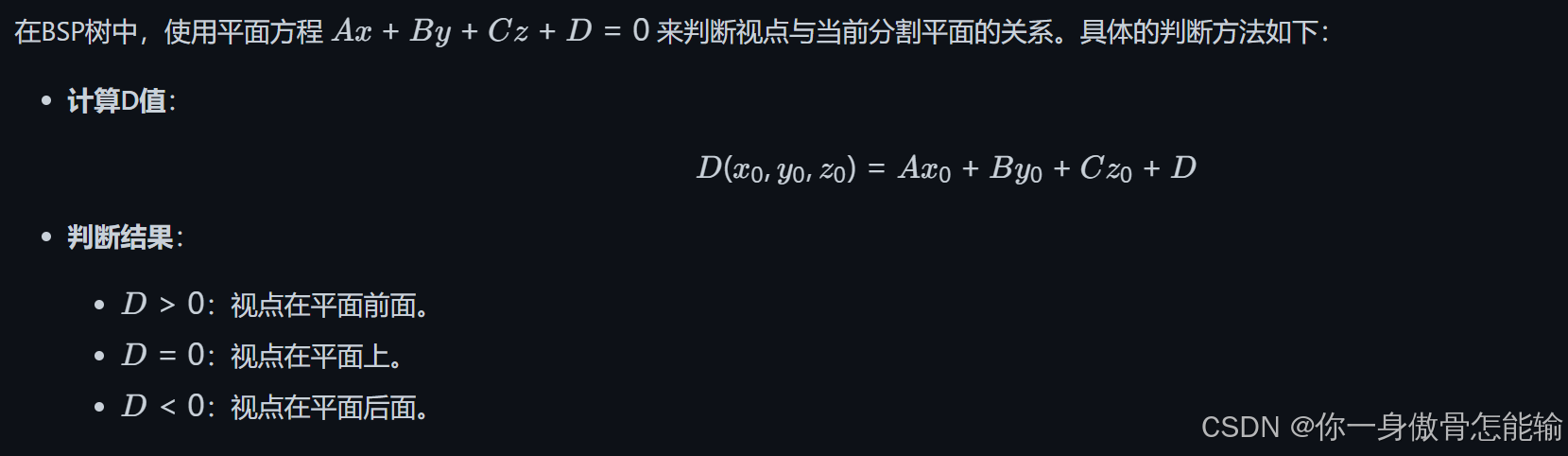
BSP树的遍历主要用于确定从特定视点(如摄像机位置)渲染场景中可见的面片。通过判断视点与当前分割平面的前后关系,可以有效地决定遍历的顺序,从而实现从后向前的渲染。
1. 前后关系判断
2. 遍历逻辑
遍历BSP树的基本逻辑如下:
-
从根节点开始,判断视点与当前节点的分割平面的前后关系。
-
根据判断结果决定遍历顺序:
- 如果视点在平面前面,先遍历背向子树,再渲染当前节点的面片,最后遍历前向子树。
- 如果视点在平面后面,先遍历前向子树,再渲染当前节点的面片,最后遍历背向子树。
- 如果视点在平面上,先遍历前向子树,再遍历背向子树。
-
递归到叶子节点,终止遍历。
3. 示例代码
以下是从后向前遍历BSP树的示例代码:
void traverse_tree(bsp_tree* tree, point eye) {
if (tree->empty()) {
return; // 如果当前节点为空,直接返回
}
// 判断视点与当前分割平面的关系
int location = tree->find_location(eye);
if (location > 0) { // 视点在平面前面
traverse_tree(tree->back, eye); // 先遍历背向子树
display(tree->polygon_list); // 渲染当前节点的面片
traverse_tree(tree->front, eye); // 再遍历前向子树
}
else if (location < 0) { // 视点在平面后面
traverse_tree(tree->front, eye); // 先遍历前向子树
display(tree->polygon_list); // 渲染当前节点的面片
traverse_tree(tree->back, eye); // 再遍历背向子树
}
else { // 视点在平面上
traverse_tree(tree->front, eye); // 先遍历前向子树
traverse_tree(tree->back, eye); // 再遍历背向子树
}
}
4. 总结
BSP树的遍历方法通过判断视点与分割平面的前后关系,能够有效地控制渲染顺序,实现从后向前的渲染。这种方法在处理透明物体和复杂场景时尤为重要,能够确保正确的可见性和渲染效果。通过递归遍历BSP树,可以高效地管理和渲染场景中的几何体。
BSP树的种类
在计算机图形学中,BSP树有两大类别,分别是为轴对齐(Axis-Aligned)BSP树和多边形对齐(Polygon-Aligned)BSP树。下面分别进行介绍。
轴对齐BSP树 (Axis-Aligned BSP Tree)
轴对齐BSP树是一种特殊类型的BSP树,主要用于高效地管理和渲染三维场景中的几何体。它通过将场景包围在一个轴对齐包围盒(AABB)中,并递归地将这个包围盒细分为更小的盒子,从而实现空间的组织和管理。
1. 创建轴对齐BSP树的步骤
步骤概述:
- 初始化AABB:首先,将整个场景包围在一个AABB中。
- 递归分割:以递归的方式将这个包围盒分为若干个更小的盒子。
- 选择分割轴:在每一层递归中,选择一个轴(x、y或z)来进行分割。
- 生成分割平面:生成一个与所选轴垂直的平面,将当前盒子一分为二。
- 处理相交物体:对于与分割平面相交的物体,决定它们的归属:
- 将物体分割为两个部分,分别存储在两个子集。
- 或者将物体存储在当前层次上,成为两个子集的一部分。
- 递归细分:对每个子盒子重复上述过程,直到满足终止条件。
2. 终止条件
分割过程会在以下条件之一满足时终止:
- 达到用户定义的最大树深度。
- 当前盒子内的几何图元数量低于用户定义的阈值。
3. 分割策略
分割平面的选择对提高效率至关重要。常见的分割策略包括:
-
循环分割:在根节点沿x轴分割,接着在子盒子中沿y轴分割,再在孙盒子中沿z轴分割,形成一个循环。这种方法的优点是简单且易于实现,常用于构建k-d树(k-dimensional tree)。
-
最长边分割:在每次分割时,选择当前盒子的最长边作为分割轴。这种方法可以更好地适应物体的分布,通常能提高空间的利用率和查询效率。
4. 示例
以下是一个简单的伪代码示例,展示如何构建轴对齐BSP树:
function build_axis_aligned_bsp_tree(AABB box, List<Geometry> geometries, int depth) {
if (depth >= MAX_DEPTH or geometries.size() <= MAX_GEOMETRIES) {
return create_leaf_node(box, geometries);
}
// 选择分割轴(循环或最长边)
axis = choose_split_axis(box);
split_position = calculate_split_position(box, geometries, axis);
// 创建分割平面
Plane split_plane = create_plane(axis, split_position);
// 分割几何体
List<Geometry> front_geometries = [];
List<Geometry> back_geometries = [];
for (geometry in geometries) {
if (geometry intersects split_plane) {
// 处理相交的几何体
split_geometry(geometry, split_plane, front_geometries, back_geometries);
} else if (geometry is in front of split_plane) {
front_geometries.add(geometry);
} else {
back_geometries.add(geometry);
}
}
// 递归构建子树
Node node = new Node();
node.front = build_axis_aligned_bsp_tree(create_front_box(box, split_plane), front_geometries, depth + 1);
node.back = build_axis_aligned_bsp_tree(create_back_box(box, split_plane), back_geometries, depth + 1);
return node;
}
5. 总结
轴对齐BSP树通过将场景分割为多个AABB,能够有效地管理和渲染三维场景中的几何体。通过选择合适的分割策略和终止条件,可以优化树的结构,提高空间查询和渲染的效率。这种方法在计算机图形学、游戏开发和空间数据管理等领域具有广泛的应用。
下图展示了一种轴对齐BSP树的分割过程。
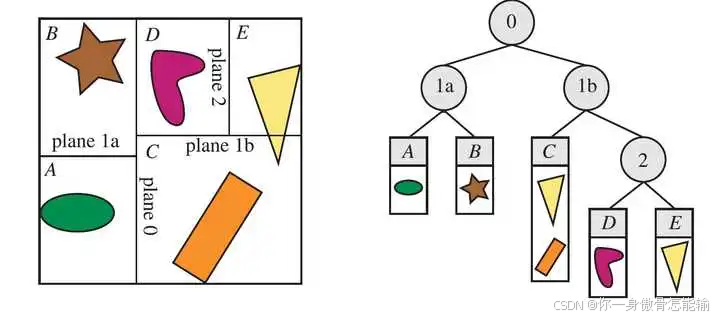
图5 轴对齐 BSP树。在这个示例中,允许空间分割位于轴上的任意位置,不一定必须在中点位置,形成的空间体分别用A~E来标志。右图所示的树是当前的BSP树数据结构,每个叶子节点表示一个区域,区域内容显示在下方。注意,黄色三角形在物体列表中含有C和E两个区域,因为它同时覆盖了这两个区域。
值得一提的是,从前到后的粗排序(Rough Front-to-Back Sorting)是轴对齐BSP树的一种应用示例,这种方法对于遮挡剔除算法非常有用。而在视点的另一侧进行遍历,可以得到从后向前的粗排序(Rough Fack-to-Gront Sorting),这对于透明排序非常有用。且还可以用来测试射线和场景几何体相交的问题,只需将视点位置换为射线原点即可,另外还可以用于视锥裁剪。
多边形对齐BSP树 (Polygon-aligned BSP Tree)
多边形对齐BSP树是一种特殊的BSP树,其中使用多边形作为分隔物来划分空间。这种方法允许更精确地管理和渲染复杂的三维场景,尤其是在处理多边形时。以下是多边形对齐BSP树的详细介绍。
1. 创建多边形对齐BSP树的步骤
步骤概述:
- 选择分割多边形:在根节点处,选择一个多边形作为分隔物。这个多边形的平面将场景中的其他多边形分为两组。
- 分割多边形:对于与分割平面相交的多边形,沿着交线将其分为两部分。
- 递归分割:在每个半空间中,选择另一个多边形作为新的分隔物,继续对该半空间中的多边形进行分割。
- 终止条件:重复上述过程,直到所有多边形都被包含在BSP树中。
2. 终止条件
创建多边形对齐BSP树的终止条件通常包括:
- 达到用户定义的最大树深度。
- 当前半空间中的多边形数量低于某个阈值。
3. 平衡树的构建
为了提高效率,避免形成完全不平衡的树结构,构建多边形对齐BSP树时应尽量保持平衡。理想情况下,每个叶子节点的深度应相同或相差一个层次。这可以通过选择合适的分割多边形和优化分割策略来实现。
4. 遍历与渲染
多边形对齐BSP树的一个显著特点是能够对给定的视点进行严格的前后顺序遍历。这种遍历方式可以实现从后向前或从前向后的渲染顺序,适合与画家算法结合使用,从而在不使用Z缓冲的情况下绘制整个场景。
5. 应用场景
多边形对齐BSP树的应用包括但不限于:
- 渲染:通过严格的前后顺序遍历,结合画家算法进行高效渲染。
- 相交测试:用于检测多边形之间的相交关系。
- 碰撞检测:在游戏和模拟中,检测物体之间的碰撞。
6. 示例
以下是一个简单的伪代码示例,展示如何构建多边形对齐BSP树:
function build_polygon_aligned_bsp_tree(List<Polygon> polygons) {
if (polygons.isEmpty()) {
return null; // 如果没有多边形,返回空
}
// 选择一个多边形作为分隔物
Polygon split_polygon = choose_split_polygon(polygons);
Plane split_plane = create_plane(split_polygon);
// 分割多边形
List<Polygon> front_polygons = [];
List<Polygon> back_polygons = [];
List<Polygon> intersecting_polygons = [];
for (polygon in polygons) {
if (polygon intersects split_plane) {
intersecting_polygons.add(polygon);
// 沿交线分割多边形
split_polygon(polygon, split_plane, front_polygons, back_polygons);
} else if (polygon is in front of split_plane) {
front_polygons.add(polygon);
} else {
back_polygons.add(polygon);
}
}
// 递归构建子树
Node node = new Node();
node.split_polygon = split_polygon;
node.front = build_polygon_aligned_bsp_tree(front_polygons);
node.back = build_polygon_aligned_bsp_tree(back_polygons);
node.intersecting = intersecting_polygons; // 存储相交的多边形
return node;
}
7. 总结
多边形对齐BSP树通过使用多边形作为分隔物,能够更精确地管理和渲染复杂的三维场景。它的严格前后顺序遍历特性使其在渲染和碰撞检测等领域具有广泛的应用。尽管构建过程可能较为耗时,但一旦构建完成,可以高效地用于多种计算机图形学任务。
下图是一个多边形对齐BSP树的图示。
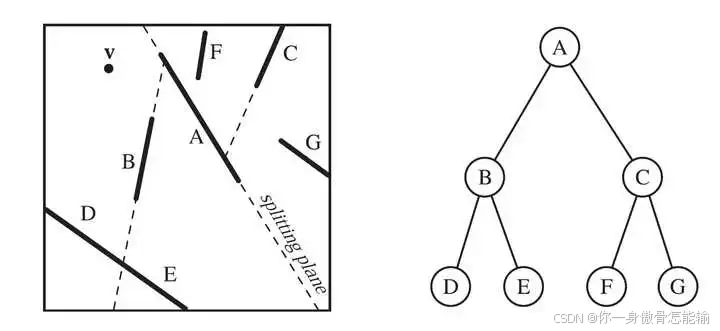
图6 多边形对齐BSP树。左图中,多边形分别用A~G表示。首先,用多边形A对空间进行分割,生成的两个半空间分别由多边形B和C分割,由B形成的分割平面与左下角的多边形相交,将其分割为多边形D和E。最后形成的BSP书如右图所示。



















 6708
6708

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











