



问题:运行以下语句后,在rviz界面选择2D Nav Goal后,小车一直在撞墙,不往目标去
roslaunch mbot_navigation nav_cloister_demo.launch
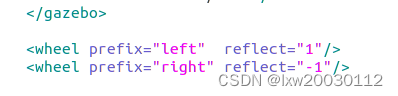
解决方法:打开/home/star/catkin_ws/src/mbot_description/urdf/xacro/gazebo下的mbot_base_gazebo.xacro,修改reflect参数即可,下图是改完的
 文章讨论了在使用特定ROSlaunch文件时,小车在rviz中无法正确导航到2DNavGoal的问题。解决办法是定位到mbot_description的urdf/xacro/gazebo文件夹,修改`mbot_base_gazebo.xacro`中的reflect参数。
文章讨论了在使用特定ROSlaunch文件时,小车在rviz中无法正确导航到2DNavGoal的问题。解决办法是定位到mbot_description的urdf/xacro/gazebo文件夹,修改`mbot_base_gazebo.xacro`中的reflect参数。
问题:运行以下语句后,在rviz界面选择2D Nav Goal后,小车一直在撞墙,不往目标去
roslaunch mbot_navigation nav_cloister_demo.launch
解决方法:打开/home/star/catkin_ws/src/mbot_description/urdf/xacro/gazebo下的mbot_base_gazebo.xacro,修改reflect参数即可,下图是改完的
 4030
4532
4030
4532

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























