







 本文档详细介绍了如何使用ROS的gmapping节点和turtlebot底盘移动及激光雷达数据进行室内建图。首先,安装了必要的依赖包,然后创建并配置了launch文件,包括rplidar_gmapping.launch.xml和rplidar_gmapping_demo.launch,以实现gmapping和move_base的集成。接着,通过修改rplidar.launch文件添加静态变换,实现了从rosbag记录的数据中重建地图的过程。最后,演示了在gazebo环境中使用gmapping进行建图的方法。文章还提到了如何保存地图和使用rosbag回放功能来验证建图效果。
本文档详细介绍了如何使用ROS的gmapping节点和turtlebot底盘移动及激光雷达数据进行室内建图。首先,安装了必要的依赖包,然后创建并配置了launch文件,包括rplidar_gmapping.launch.xml和rplidar_gmapping_demo.launch,以实现gmapping和move_base的集成。接着,通过修改rplidar.launch文件添加静态变换,实现了从rosbag记录的数据中重建地图的过程。最后,演示了在gazebo环境中使用gmapping进行建图的方法。文章还提到了如何保存地图和使用rosbag回放功能来验证建图效果。
体验内容
使用gmapping方法利用turtlebot底盘移动信息和激光雷达数据进行建图。
1. 安装一些依赖包
sudo apt-get install ros-melodic-move-base*
sudo apt-get install ros-melodic-map-server*
sudo apt-get install ros-melodic-amcl*
sudo apt-get install ros-melodic-navigation*
sudo apt-get install ros-melodic-openslam-gmapping
2. 新建launch文件及其配置文件
(1)rplidar_gmapping.launch.xml
在turtlebot_ws/src/turtlebot_apps/turtlebot_navigation/launch/includes/gmapping/目录下新建文件rplidar_gmapping.launch.xml
<launch>
<arg name="scan_topic" default="scan" />
<arg name="base_frame" default="base_footprint"/>
<arg name="odom_frame" default="odom"/>
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen">
<param name="base_frame" value="$(arg base_frame)"/>
<param name="odom_frame" value="$(arg odom_frame)"/>
<param name="map_update_interval" value="0.01"/>
<param name="maxUrange" value="4.0"/>
<param name="maxRange" value="5.0"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="3"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="minimumScore" value="30"/>
<param name="srr" value="0.01"/>
<param name="srt" value="0.02"/>
<param name="str" value="0.01"/>
<param name="stt" value="0.02"/>
<param name="linearUpdate" value="0.05"/>
<param name="angularUpdate" value="0.0436"/>
<param name="temporalUpdate" value="-1.0"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="8"/>
<!--
<param name="xmin" value="-50.0"/>
<param name="ymin" value="-50.0"/>
<param name="xmax" value="50.0"/>
<param name="ymax" value="50.0"/>
make the starting size small for the benefit of the Android client's memory...
-->
<param name="xmin" value="-1.0"/>
<param name="ymin" value="-1.0"/>
<param name="xmax" value="1.0"/>
<param name="ymax" value="1.0"/>
<param name="delta" value="0.05"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
<remap from="scan" to="$(arg scan_topic)"/>
</node>
</launch>
(2)rplidar_gmapping_demo.launch
在turtlebot_ws/src/turtlebot_apps/turtlebot_navigation/launch/目录下新建文件rplidar_gmapping_demo.launch
<launch>
<!-- 2D_laser -->
<arg name="2D_laser" default="rplidar"/>
<include file="$(find rplidar_ros)/launch/rplidar.launch">
</include>
<!-- Gmapping -->
<arg name="custom_gmapping_launch_file" default="$(find turtlebot_navigation)/launch/includes/gmapping/$(arg 2D_laser)_gmapping.launch.xml"/>
<include file="$(arg custom_gmapping_launch_file)"/>
<!-- Move base -->
<include file="$(find turtlebot_navigation)/launch/includes/move_base.launch.xml"/>
</launch>
(3)修改rplidar.launch
对turtlebot_ws/src/rplidar_ros/launch目录下的文件rplidar.launch进行修改,添加一句
<node pkg="tf" type="static_transform_publisher" name="base_to_laser" args="0.0 0.0 0.18 0.0 0.0 1.0 0.0 base_link laser 100"/>
注意要添加在前一个
</node>后面,并且注意空格。
3. 运行
roscore
roslaunch turtlebot_bringup minimal.launch
roslaunch turtlebot_navigation rplidar_gmapping_demo.launch
rviz
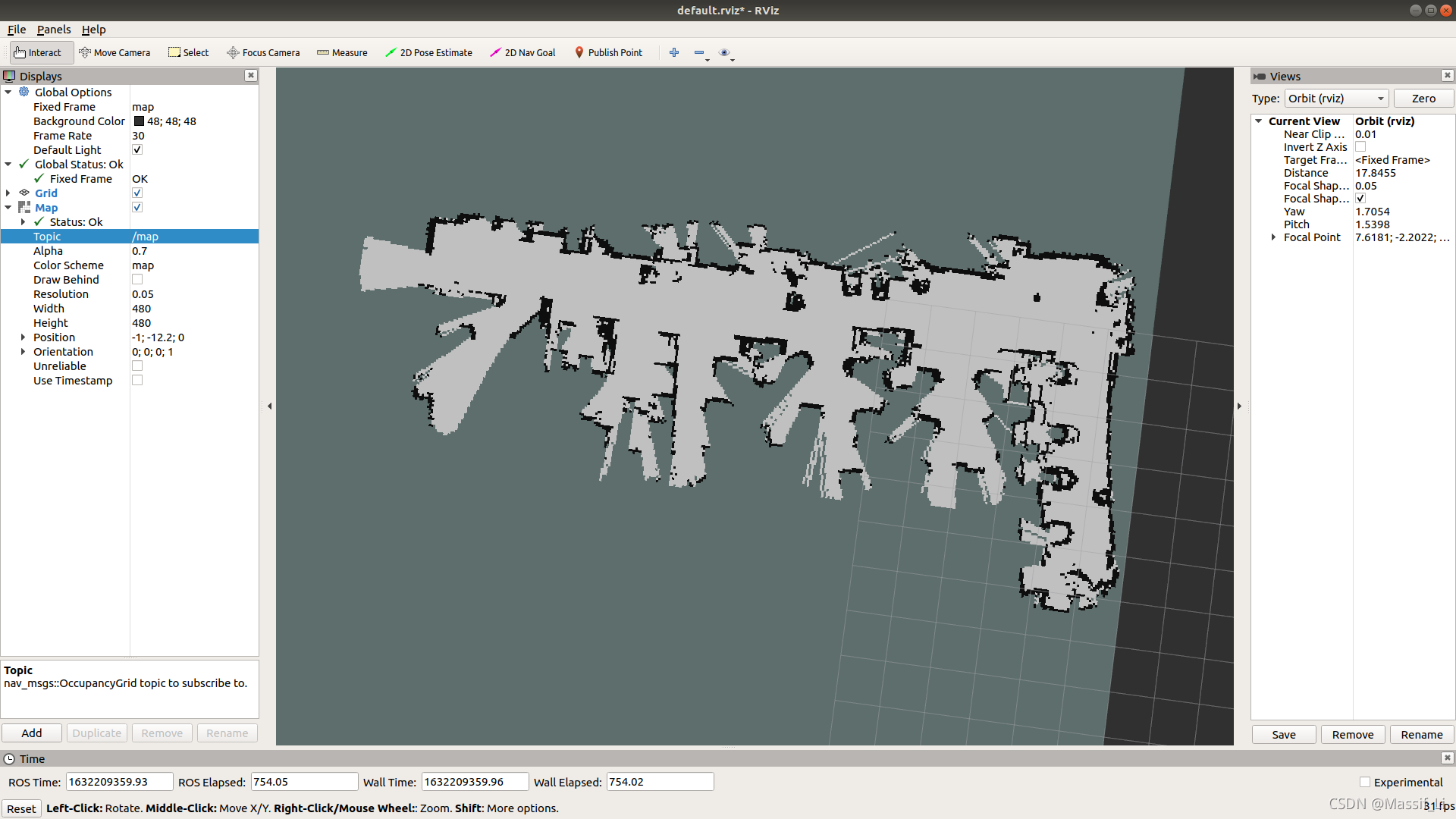
将map数据Add进来,并选择好话题。
启动键盘控制,可以看到rviz程序中显示的地图在发生变化。
roslaunch turtlebot_teleop keyboard_teleop.launch
查看tf树和graph图
rosrun rqt_tf_tree rqt_tf_tree
rqt_graph
得到一张如下图所示的建图结果。
此时分析一下工作中的节点和信息流
保存地图的操作如下,将得到一张图片和一个地图配置文件。
rosrun map_server map_saver -f <path>
作业内容
一、rosbag
自学rosbag,理解时间戳概念,写出rosbag的相关指令,利用rosbag储存的信息和gmapping,完成建图。
在控制turtlebot执行运动和建图之前,首先打开一个终端运行
rosbag record -a
录制完成后,在该终端按Ctrl+C结束录制,生成了数据包。
断开turtlebot、激光雷达与计算机的连接,重新开启终端,执行
roscore
roslaunch turtlebot_navigation rplidar_gmapping_demo.launch
rviz
rosbag play <filename>.bag
二、在gazebo中实现gmapping
使用中国大学慕课网《机器人操作系统入门》课程的仿真环境,其代码的位置为:
Kinetic:https://github.com/DroidAITech/ROS-Academy-for-Beginners/tree/kinetic
Melodic:https://github.com/DroidAITech/ROS-Academy-for-Beginners/tree/melodic
创建工作空间,将上面链接中下载的代码放入src目录中,进行编译即可。
可能会遇到cmake报错,提示qt出现问题,需要安装qt,参考:
- https://blog.youkuaiyun.com/x356982611/article/details/71169940
- https://blog.youkuaiyun.com/weixin_41477306/article/details/95743555
成功编译后,运行
roscore
roslaunch robot_sim_demo robot_spawn.launch
roslaunch slam_sim_demo gmapping_demo.launch
roslaunch slam_sim_demo view_slam.launch
可以使用rviz中2D Nav Goal工具指定目标位姿,使机器人运动起来。

















 827
827

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









