








 超级会员免费看
超级会员免费看

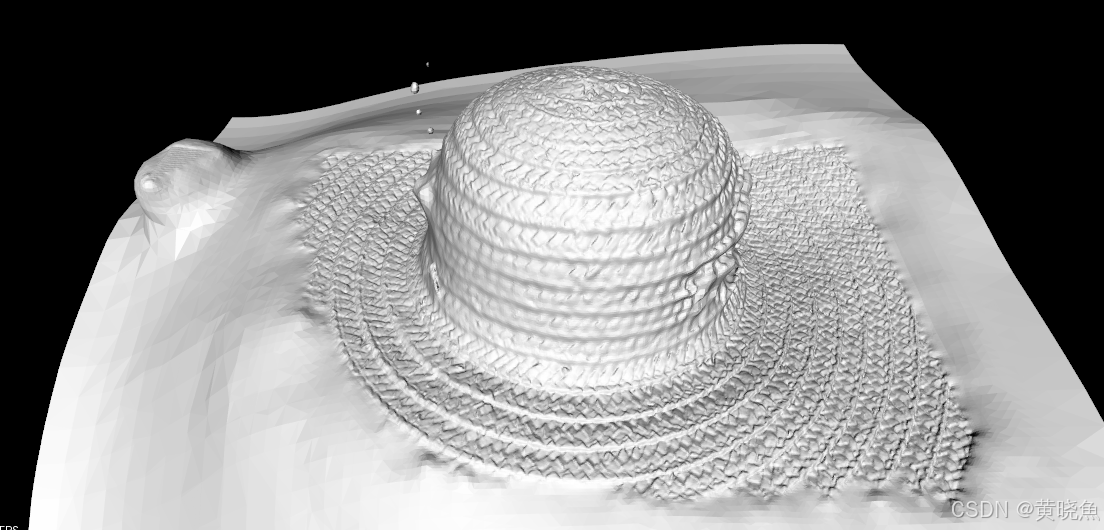
测试效果
算法简介
PCL(Point Cloud Library,点云库)中的泊松曲面重建算法是一种用于从离散点云数据中生成连续、平滑三维曲面模型的方法。该算法因其高精度的重建效果在计算机视觉、计算机图形学、医学成像、机器人等领域得到了广泛应用。
泊松曲面重建算法基于离散泊松方程的解析求解方法。其核心思想是将点云数据作为边界条件,在边界上定义一个逼近函数,并在整个点云区域内求解泊松方程,使得逼近函数在边界上与点云数据一致,并且在区域内部达到最小梯度。通过这种方式,算法能够生成一个光滑且连续的三维曲面模型。
测试代码
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/io/ply_io.h>
#include <pcl/kdtree/kdtree_flann.h>
#include <pcl/features/normal_3d.h>
#include <pcl/surface/poisson.h>
#include <boost/thread/thread.hpp>
#include <pcl/visualiza
 订阅专栏 解锁全文
订阅专栏 解锁全文



















 3533
3533

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











