




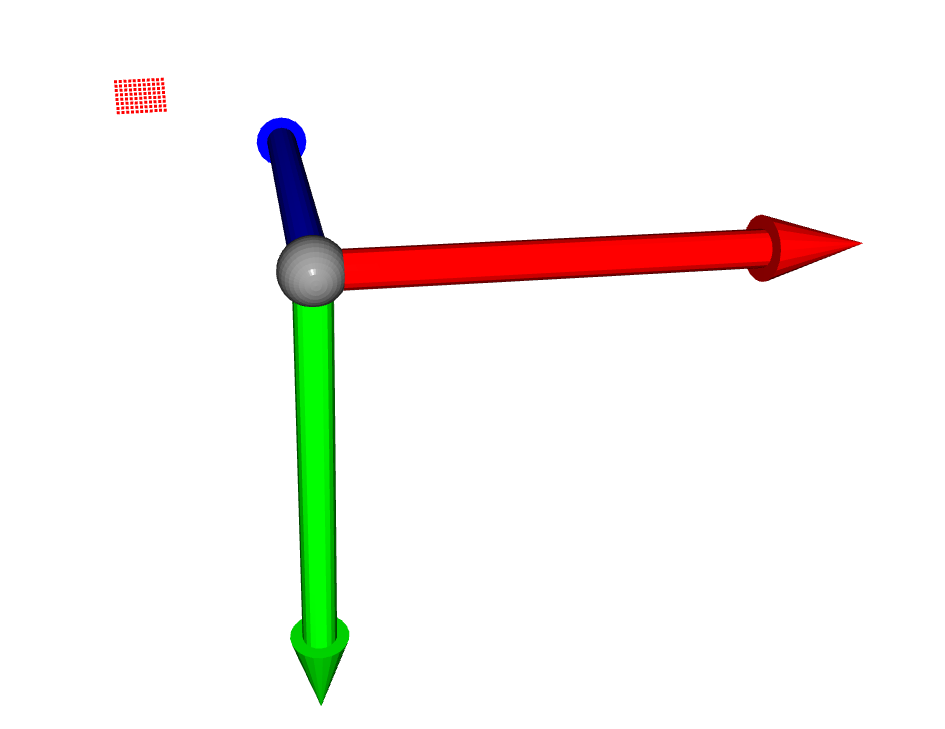
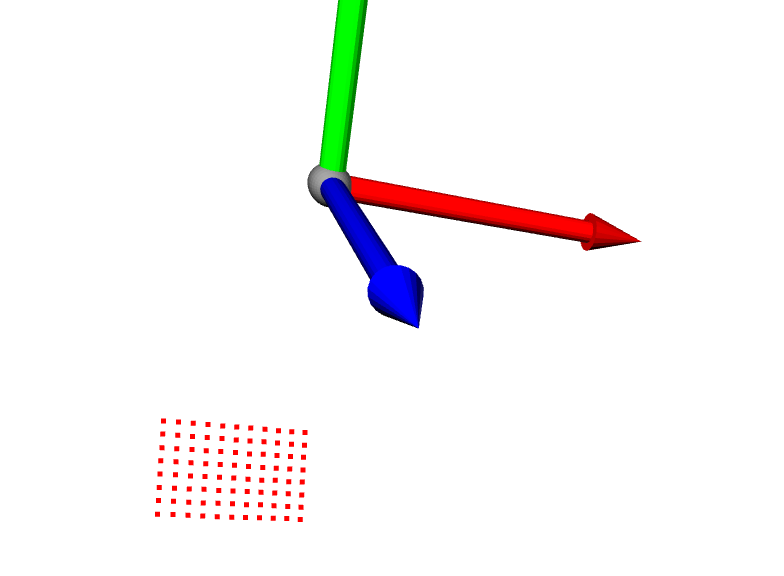
测试效果
下图是基于标定板上的角点重建出来的空间三维点数据
立体矫正+三维重建
上次说到我们已经搞定立体矫正了,那么就可以基于矫正之后的两张图片来计算对应点的视差了,那么直接跟着代码走:
首先还是将左右相机两张图片读取进来

紧接着应用立体矫正,这个矩阵是基于p1 r1计算出来的,上一篇博客有说

然后把矫正之后的图片保存下来,方便我们后续人为去确定一下立体矫正有没有按照我们预想的去运行。

将畸变矫正之后的两张图片由三通道转为单通道

分别在两张图像上找棋盘格的角点

找到角点之后稍微对数据处理一下,然后传入
triangulatePoints
这个算子里面去
得到的数据是4X1的数据

手动再次转换一下得到三位点坐标数据
open3d显示
加载open3d库,用于显示点云

将上述得到的三维点用于初始化一个open3d的点云对象
并设置好颜色信息,上面的这个是按照rgb来的,也就是说把点云设置为红色
![]()
这一句是创建一个坐标轴对象,尺寸是200mm

然后把刚才的pcd点云对象和坐标轴对象一起显示出来,方便观察。
显示完成之后就将点云保存在D盘的根目录下面。




















 2840
2840


 到【灌水乐园】发言
到【灌水乐园】发言










