



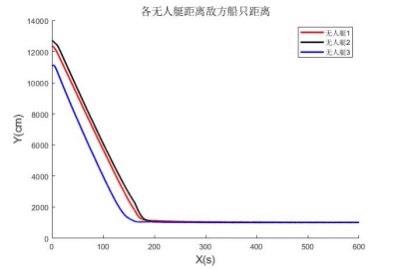
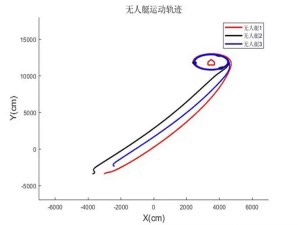
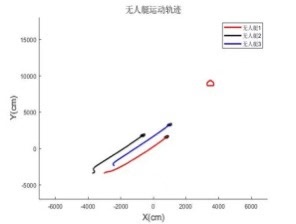
MATLAB程序:多个无人船 协同围捕控制算法 3船围捕控制,围捕运动船只 可以仿真多个船之间的距离以及距离目标船的距离,特别适合学习、参考
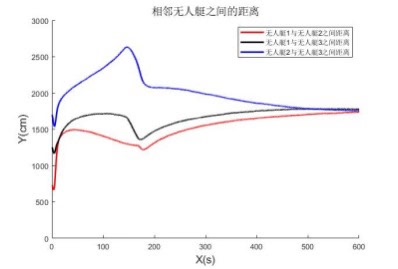
在智能船舶领域,多个无人船协同围捕控制算法是个超有趣的研究方向。今天就来唠唠基于MATLAB实现的3船围捕运动船只的控制算法,它还能仿真各船之间以及与目标船的距离,简直是学习和参考的宝藏。
1. 整体思路
实现这个围捕算法,首先要明确每艘无人船的运动模型。通常我们会把无人船简化成质点,然后通过控制质点的位置和速度来模拟船的运动。每艘船要做的就是不断调整自己的位置,逐渐靠近目标船,同时还要和其他两艘协作船保持合适的距离。
2. 核心代码与分析
% 初始化参数
num_boats = 3; % 无人船数量
target_x = 10; % 目标船初始x坐标
target_y = 10; % 目标船初始y坐标
boat_x = zeros(1, num_boats); % 无人船初始x坐标
boat_y = zeros(1, num_boats);
boat_vx = zeros(1, num_boats); % 无人船初始x方向速度
boat_vy = zeros(1, num_boats);
dt = 0.1; % 时间步长这段代码很基础,主要是初始化一些关键参数。我们设定了无人船的数量,目标船的初始位置,还有无人船的初始位置和速度,dt是时间步长,它决定了每次更新位置和速度的时间间隔,就像游戏里每一帧的时间,时间步长越小,模拟越精细,但计算量也越大。
for t = 1:100 % 模拟100个时间步
for i = 1:num_boats
% 计算到目标船的距离
dist_to_target = sqrt((boat_x(i) - target_x)^2 + (boat_y(i) - target_y)^2);
% 计算到其他无人船的距离
dist_to_others = zeros(1, num_boats - 1);
other_boat_count = 1;
for j = 1:num_boats
if j ~= i
dist_to_others(other_boat_count) = sqrt((boat_x(i) - boat_x(j))^2 + (boat_y(i) - boat_y(j))^2);
other_boat_count = other_boat_count + 1;
end
end
% 根据距离调整速度
if dist_to_target > 1
boat_vx(i) = boat_vx(i) + (target_x - boat_x(i)) / dist_to_target * 0.1;
boat_vy(i) = boat_vy(i) + (target_y - boat_y(i)) / dist_to_target * 0.1;
end
% 保持与其他无人船的合适距离
for k = 1:num_boats - 1
if dist_to_others(k) < 2
boat_vx(i) = boat_vx(i) - (boat_x(i) - boat_x(find([1:num_boats] ~= i, 1, 'first'))) / dist_to_others(k) * 0.05;
boat_vy(i) = boat_vy(i) - (boat_y(i) - boat_y(find([1:num_boats] ~= i, 1, 'first'))) / dist_to_others(k) * 0.05;
end
end
% 更新位置
boat_x(i) = boat_x(i) + boat_vx(i) * dt;
boat_y(i) = boat_y(i) + boat_vy(i) * dt;
end
% 这里可以添加绘图代码,实时显示船只位置
end这段循环代码是核心部分。外层循环控制时间步,在每个时间步内,内层循环对每艘无人船进行操作。首先计算每艘无人船到目标船的距离,然后计算到其他无人船的距离。如果到目标船的距离大于1,就朝着目标船的方向调整速度,这里的0.1可以理解为一个速度调整系数,控制着无人船靠近目标船的速度快慢。对于和其他无人船的距离,如果小于2,就调整速度来保持合适间距,0.05同样是速度调整系数。最后根据速度更新无人船的位置。要是想实时看到船的运动轨迹,就在这里添加绘图代码就行。
3. 优势与应用
这个算法特别适合学习,它把复杂的多船协同问题简化,清晰地展示了如何在考虑目标和协作关系下控制船只运动。在实际应用中,比如海上救援时围堵失控船只,或者海洋监测时对特定区域的包围监测,都能借鉴这种多船协同围捕的思路。
希望大家通过这个分享,对MATLAB实现多无人船协同围捕控制算法有更深入的理解,一起在智能船舶的技术海洋里遨游!

















 1350
1350

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









