



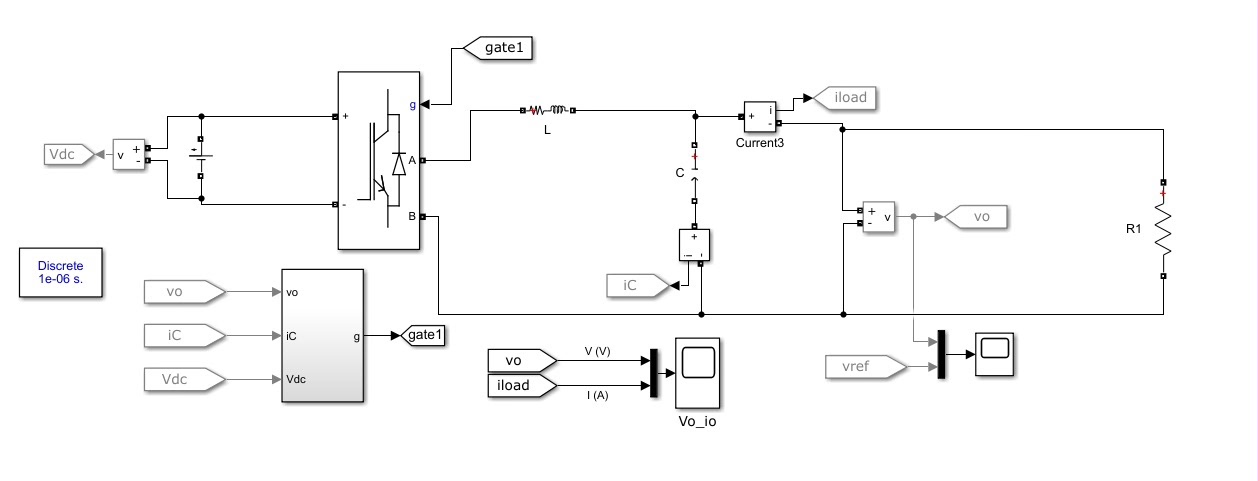
双极性SPWM控制单相全桥逆变电路仿真模型,电压电流双闭环控制。 直流输入电压范围在10-40v左右,输出交流峰值在正负10-40v,频率1-200hz可调。
在电力电子领域,逆变电路是实现直流到交流转换的关键环节。今天咱就唠唠双极性SPWM控制的单相全桥逆变电路,还带电压电流双闭环控制的哦,这组合可让电路性能更稳更优。
一、关键指标设定
- 直流输入:咱们设定直流输入电压范围在10 - 40V左右,这个范围考虑了多种直流电源场景,比如常见的电池供电系统。
- 交流输出:输出交流峰值得在正负10 - 40V,并且频率能在1 - 200Hz之间灵活可调。这意味着该逆变电路可以适配不同的用电设备,从低频的加热设备到高频的通信设备等。
二、双极性SPWM控制原理与代码呈现
双极性SPWM控制方式,简单来说就是在调制波的半个周期内,三角载波在正负极间连续变化,与调制波比较产生的SPWM波也是在正负极间交替变化。
咱们来看段简单的Python代码模拟生成双极性SPWM波:
import numpy as np
import matplotlib.pyplot as plt
# 参数设置
fc = 1000 # 载波频率
fm = 50 # 调制波频率
T = 1 / fm
Tc = 1 / fc
t = np.linspace(0, T, 1000)
m = 0.8 # 调制比
# 生成调制波
modulating_wave = m * np.sin(2 * np.pi * fm * t)
# 生成载波
carrier_wave = np.floor((t / Tc - np.floor(t / Tc)) * 2) - 1
# 生成SPWM波
spwm_wave = np.where(modulating_wave > carrier_wave, 1, -1)
plt.figure(figsize=(10, 6))
plt.plot(t, modulating_wave, label='Modulating Wave')
plt.plot(t, carrier_wave, label='Carrier Wave')
plt.plot(t, spwm_wave, label='SPWM Wave')
plt.xlabel('Time (s)')
plt.ylabel('Amplitude')
plt.legend()
plt.grid(True)
plt.show()这段代码里,首先定义了载波频率 fc 和调制波频率 fm 等关键参数。通过 np.sin 函数生成调制波,利用 np.floor 函数巧妙构建三角载波。最后通过比较调制波和载波,生成SPWM波。从代码中能直观看到双极性SPWM波是如何在调制波与载波交互下产生的,不同的调制比 m 会直接影响SPWM波的输出特性哦。
三、电压电流双闭环控制
电压电流双闭环控制能有效提升逆变电路的性能和稳定性。简单理解,电压环作为外环,先检测输出电压并与给定值比较,其误差经过PI调节器输出作为电流环的给定值。电流环作为内环,再将检测到的输出电流与电压环给定值比较,误差经PI调节器后去控制逆变电路的开关管。
咱假设用MATLAB/Simulink搭建这样的双闭环控制系统,在电压环PI调节器模块里,代码类似这样:
% 电压环PI调节器参数
kp_v = 0.5;
ki_v = 10;
e_v = ref_v - measured_v; % 电压误差
integral_v = integral_v + e_v * Ts; % Ts为采样时间
control_signal_v = kp_v * e_v + ki_v * integral_v;在电流环PI调节器模块里,代码大概如下:
% 电流环PI调节器参数
kp_i = 0.1;
ki_i = 1;
e_i = control_signal_v - measured_i; % 电流误差
integral_i = integral_i + e_i * Ts;
control_signal_i = kp_i * e_i + ki_i * integral_i;这里通过调整PI调节器的比例系数 kp 和积分系数 ki 来优化控制效果。电压环的 kpv 和 kiv 以及电流环的 kpi 和 kii 取值不同,会让电路的响应速度、稳定性和稳态精度产生很大变化呢。
通过双极性SPWM控制与电压电流双闭环控制的协同工作,这个单相全桥逆变电路能在设定的直流输入和交流输出范围内,稳定高效地实现逆变功能,为各种不同需求的用电设备提供适配的交流电。无论是工业应用还是日常电子设备供电,这样的电路设计都有着广阔的应用前景。

















 5万+
5万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









