



基于MPC模型预测控制的路径跟踪控制,通过设置路径函数或者以点的形式设置路径,五次多项式路径,双移线路径,sin曲线路径都有,可在S函数内随意切换,同时加入了前轮侧偏角约束,可以完美运行! 包括:模型,参考文档,仿真调试视频,只要安装好软件16carsim和16bmatlab,就可以按照视频调试
在自动驾驶领域,路径跟踪控制是实现车辆按照预定轨迹行驶的关键技术。今天咱就来唠唠基于MPC(模型预测控制)的路径跟踪控制,这玩意儿可有意思了。
一、丰富多样的路径设定
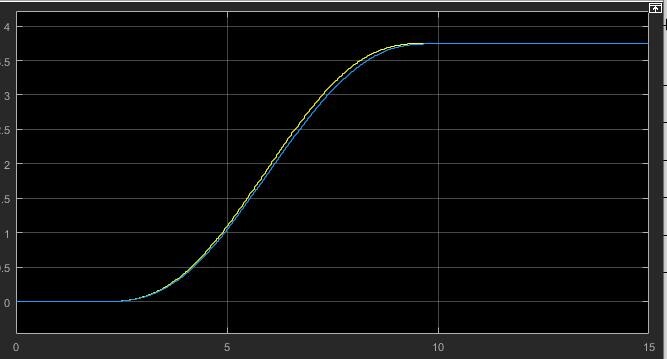
咱们可以通过设置路径函数或者以点的形式来设定路径。就拿五次多项式路径来说吧,它能灵活地对车辆行驶轨迹进行规划。假设我们要用五次多项式来描述一个路径,在代码里可能就长这样(以Python为例):
import numpy as np
import matplotlib.pyplot as plt
# 定义五次多项式路径参数
a0 = 0
a1 = 0
a2 = 0
a3 = 1
a4 = -2
a5 = 1
t = np.linspace(0, 1, 100)
x = a0 + a1 * t + a2 * t ** 2 + a3 * t ** 3 + a4 * t ** 4 + a5 * t ** 5
plt.plot(x, np.zeros_like(x))
plt.xlabel('X - Position')
plt.title('五次多项式路径示例')
plt.show()这里我们通过定义系数a0到a5来确定多项式的形状,t是一个在0到1之间均匀分布的数组,用来生成路径上的点。通过改变这些系数,就能得到各种不同形状的五次多项式路径。
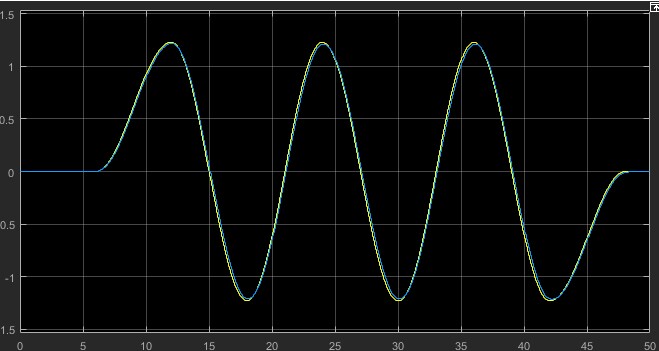
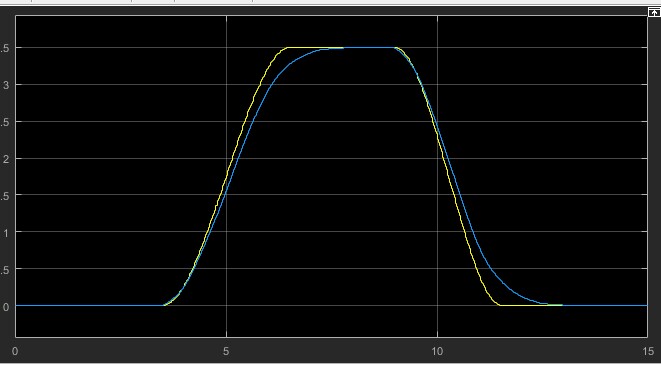
除了五次多项式路径,还有双移线路径和sin曲线路径。双移线路径可以模拟车辆在一些复杂道路上的蛇形行驶轨迹,sin曲线路径则能体现出更加平滑的曲线行驶情况。而且在S函数内,我们可以随意切换这些路径,就像给车辆换不同的“轨道”一样方便。
二、前轮侧偏角约束的加入
前轮侧偏角对车辆的行驶稳定性和路径跟踪精度有着重要影响。为了让车辆更好地按照我们设定的路径行驶,加入前轮侧偏角约束是个关键操作。在代码实现中,可能会有类似这样的片段(假设使用MATLAB):
% 设定前轮侧偏角约束
max_slip_angle = 0.3; % 最大侧偏角限制
min_slip_angle = -0.3; % 最小侧偏角限制
% 在MPC控制算法中加入约束
MPCobj = mpc(model, Ts);
MPCobj.MV(1).Min = min_slip_angle;
MPCobj.MV(1).Max = max_slip_angle;这里我们先设定了前轮侧偏角的最大和最小值,然后在MPC对象的设定中,将这些限制应用到前轮侧偏角这个操纵变量上。这样在控制过程中,前轮侧偏角就会被限制在我们设定的范围内,保证车辆行驶的安全性和稳定性。
三、模型与参考文档
关于MPC模型预测控制的路径跟踪控制,背后肯定有一套完整的理论模型支持。这个模型主要考虑车辆的动力学特性、运动学关系以及控制输入与输出之间的联系。具体的模型细节这里就不展开赘述了,大家可以查阅相关的专业书籍和论文。比如说《车辆动力学与控制》这本书,里面对车辆相关的动力学模型讲解得非常详细,是很好的参考文档。另外,一些知名学术数据库上关于MPC在路径跟踪控制方面的论文,也能为我们深入理解这个技术提供帮助。
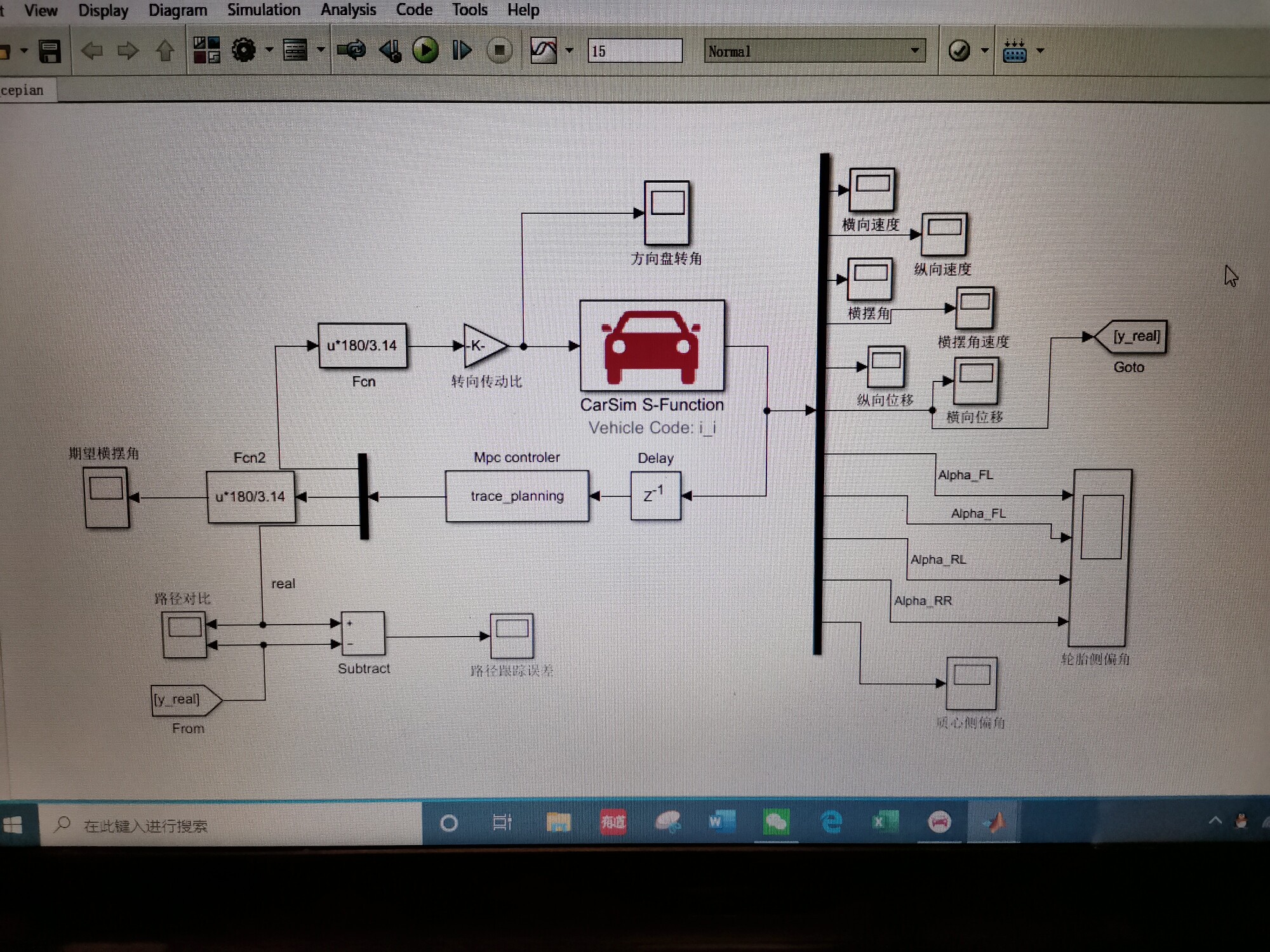
四、仿真调试与运行
要想让这个基于MPC的路径跟踪控制跑起来,仿真调试是必不可少的环节。这里我们需要安装好软件16carsim和16bmatlab。只要安装好这俩软件,就可以按照仿真调试视频来进行调试。在视频里,会一步一步教你如何搭建仿真模型,设置各种参数,观察车辆在不同路径下的行驶情况,以及如何根据调试结果调整参数,让路径跟踪效果达到最佳。而且最终这个系统可以完美运行,车辆能准确地沿着我们设定的五次多项式路径、双移线路径或者sin曲线路径行驶,是不是很酷炫!
总之,基于MPC模型预测控制的路径跟踪控制为自动驾驶的路径规划与控制提供了一种强大而有效的解决方案,通过丰富的路径设定、合理的约束加入以及完善的仿真调试,让车辆行驶更加智能和安全。感兴趣的小伙伴不妨自己动手试试!

















 1293
1293

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









