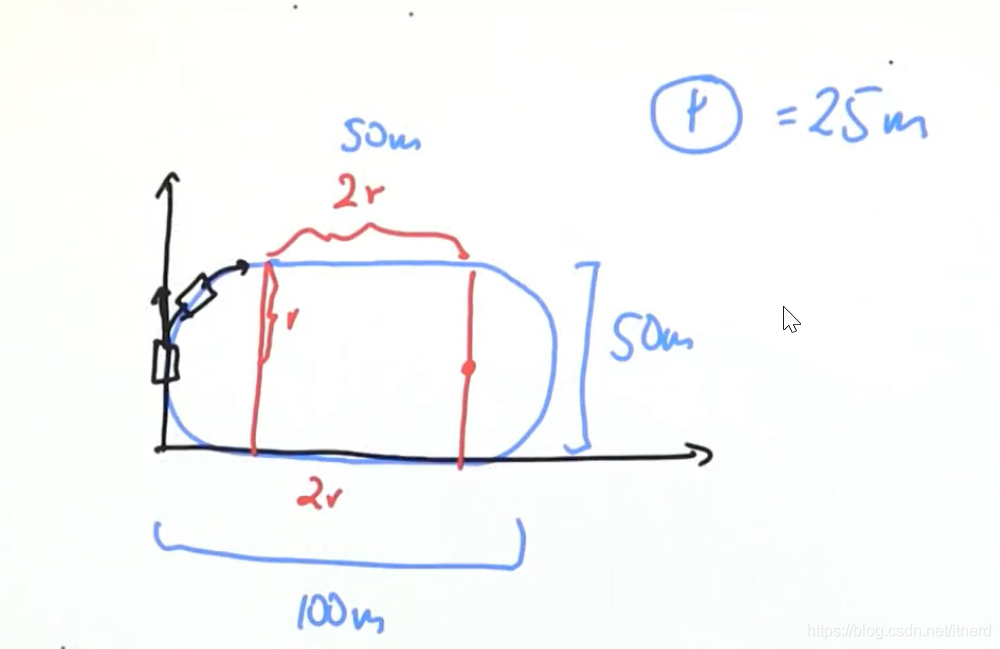
# --------------# User Instructions## Define a function cte in the robot class that will# compute the crosstrack error for a robot on a# racetrack with a shape as described in the video.## You will need to base your error calculation on# the robot's location on the track. Remember that# the robot will be traveling to the right on the# upper straight segment and to the left on the lower# straight segment.## --------------# Grading Notes## We will be testing your cte function directly by# calling it with different robot locations and making# sure that it returns the correct crosstrack error.from math import*import random
# ------------------------------------------------## this is the robot class#classrobot:# --------# init:# creates robot and initializes location/orientation to 0, 0, 0#def__init__(self, length=20.0):
self.x =0.0
self.y =0.0
self.orientation =0.0
self.length = length
self.steering_noise =0.0
self.distance_noise =0.0
self.steering_drift =0.0# --------# set:# sets a robot coordinate#defset(self, new_x, new_y, new_orientation):
self.x =float(new_x)
self.y =float(new_y)
self.orientation =float(new_orientation)%(2.0* pi)# --------# set_noise:# sets the noise parameters#defset_noise(self, new_s_noise, new_d_noise):# makes it possible to change the noise parameters# this is often useful in particle filters
self.steering_noise =float(new_s_noise)
self.distance_noise =float(new_d_noise)# --------# set_steering_drift:# sets the systematical steering drift parameter#defset_steering_drift(self, drift):
self.steering_drift = drift
# --------# move:# steering = front wheel steering angle, limited by max_steering_angle# distance = total distance driven, most be non-negativedefmove(self, steering, distance,
tolerance=0.001, max_steering_angle=pi /4.0):if steering > max_steering_angle:
steering = max_steering_angle
if steering <-max_steering_angle:
steering =-max_steering_angle
if distance <0.0:
distance =0.0# make a new copy
res = robot()
res.length = self.length
res.steering_noise = self.steering_noise
res.distance_noise = self.distance_noise
res.steering_drift = self.steering_drift
# apply noise
steering2 = random.gauss(steering, self.steering_noise)
distance2 = random.gauss(distance, self.distance_noise)# apply steering drift
steering2 += self.steering_drift
# Execute motion
turn = tan(steering2)* distance2 / res.length
ifabs(turn)< tolerance:# approximate by straight line motion
res.x = self.x +(distance2 * cos(self.orientation))
res.y = self.y +(distance2 * sin(self.orientation))
res.orientation =(self.orientation + turn)%(2.0* pi)else:# approximate bicycle model for motion
radius = distance2 / turn
cx = self.x -(sin(self.orientation)* radius)
cy = self.y +(cos(self.orientation)* radius)
res.orientation =(self.orientation + turn)%(2.0* pi)
res.x = cx +(sin(res.orientation)* radius)
res.y = cy -(cos(res.orientation)* radius)return res
def__repr__(self):return'[x=%.5f y=%.5f orient=%.5f]'%(self.x, self.y, self.orientation)############## ONLY ADD / MODIFY CODE BELOW THIS LINE ####################defdist2(self, x, y):return sqrt((self.x - x)**2+(self.y - y)**2)defcte(self, radius):if self.x < radius:
cte = self.dist2(radius, radius)- radius
elif self.x >3*radius:
cte = self.dist2(3* radius, radius)- radius
elif self.y > radius:
cte = self.y -2*radius
else:
cte =-self.y
return cte
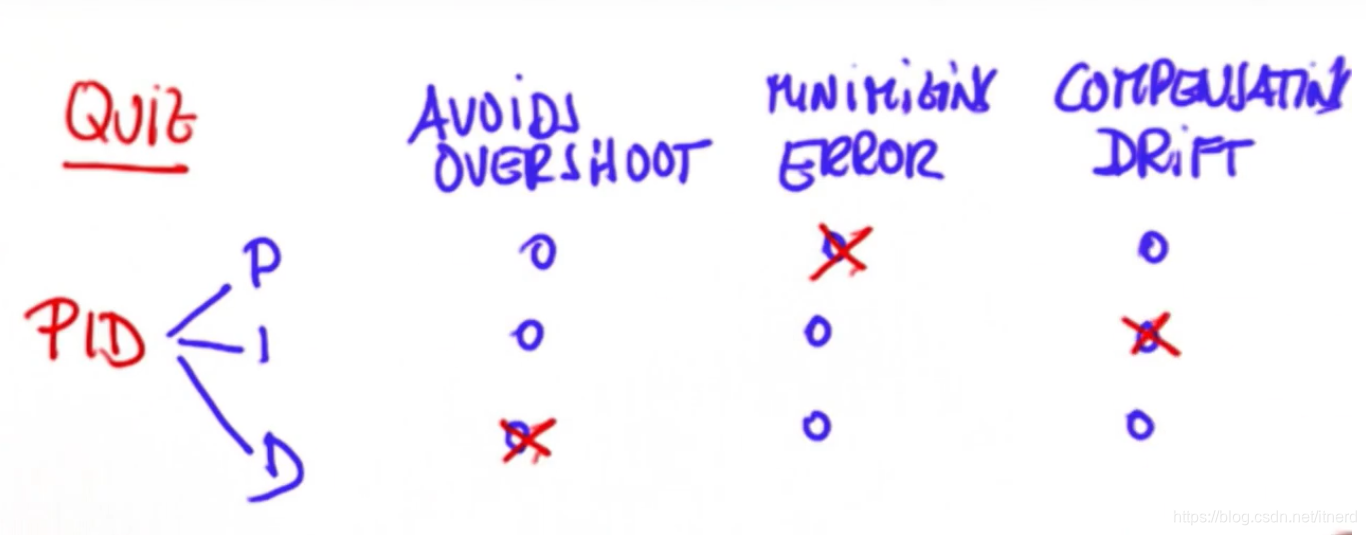
PID
# ------------------------------------------------------------------------## run - does a single control run.defrun(params, radius, printflag=False):
myrobot = robot()
myrobot.set(0.0, radius, pi /2.0)
speed =1.0# motion distance is equal to speed (we assume time = 1)
err =0.0
int_crosstrack_error =0.0
N =200
path =[]
crosstrack_error = myrobot.cte(radius)# You need to define the cte function!for i inrange(N *2):
path.append([myrobot.x, myrobot.y])
diff_crosstrack_error =- crosstrack_error
crosstrack_error = myrobot.cte(radius)
diff_crosstrack_error += crosstrack_error
int_crosstrack_error += crosstrack_error
steer =- params[0]* crosstrack_error \
- params[1]* diff_crosstrack_error \
- params[2]* int_crosstrack_error
myrobot = myrobot.move(steer, speed)if i >= N:
err += crosstrack_error **2if printflag:print(myrobot)
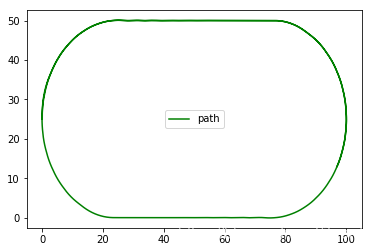
draw_path(path)return err /float(N)
radius =25.0
params =[10.0,15.0,0]# pid
err = run(params, radius,True)print('\nFinal parameters: ', params,'\n ->', err)
参数调优
deftwiddle(init_params):# k 次平均误差defk_run_err(K, params):
err =0for k inrange(K):
err += run(params, radius)
err =float(err)/float(K)return err
n_params =len(init_params)
dparams =[1.0for row inrange(n_params)]# 参数浮动范围
params =[0.0for row inrange(n_params)]
K =10for i inrange(n_params):
params[i]= init_params[i]
best_error = k_run_err(K, params)print(best_error)
n =0whilesum(dparams)>0.0000001:for i inrange(len(params)):
params[i]+= dparams[i]
err = k_run_err(K, params)print(err)if err < best_error:
best_error = err
dparams[i]*=1.1else:
params[i]-=2.0* dparams[i]
err = k_run_err(K, params)print(err)if err < best_error:
best_error = err
dparams[i]*=1.1else:
params[i]+= dparams[i]
dparams[i]*=0.5
n +=1print('Twiddle #', n, params,' -> ', best_error)print(' ')return params







 本文介绍了一种基于PID控制的机器人路径跟踪方法,通过定义交叉轨道误差(CTE)函数,实现对赛车场形状路径的精准跟踪。利用单车模型进行运动模拟,通过调整PID参数优化机器人行驶轨迹。
本文介绍了一种基于PID控制的机器人路径跟踪方法,通过定义交叉轨道误差(CTE)函数,实现对赛车场形状路径的精准跟踪。利用单车模型进行运动模拟,通过调整PID参数优化机器人行驶轨迹。


















 2140
2140




 到【灌水乐园】发言
到【灌水乐园】发言









