






 本文介绍了如何将算法仿真的车辆轨迹序列以美观的方式可视化,关注点包括车辆位置、航向角、控制量、避障算法表示以及代码实现,通过实例展示了如何配置车辆参数并用Matlab函数展示动态视觉效果。
本文介绍了如何将算法仿真的车辆轨迹序列以美观的方式可视化,关注点包括车辆位置、航向角、控制量、避障算法表示以及代码实现,通过实例展示了如何配置车辆参数并用Matlab函数展示动态视觉效果。
0. Motivation
发过论文或者准备发论文的小伙伴或都遇见个这样的问题,如何将算法仿真的车辆轨迹序列可视化得好看,这对于论文是否accepted有一定的影响,常见于轨迹规划,轨迹跟踪控制等算法仿真场景中。
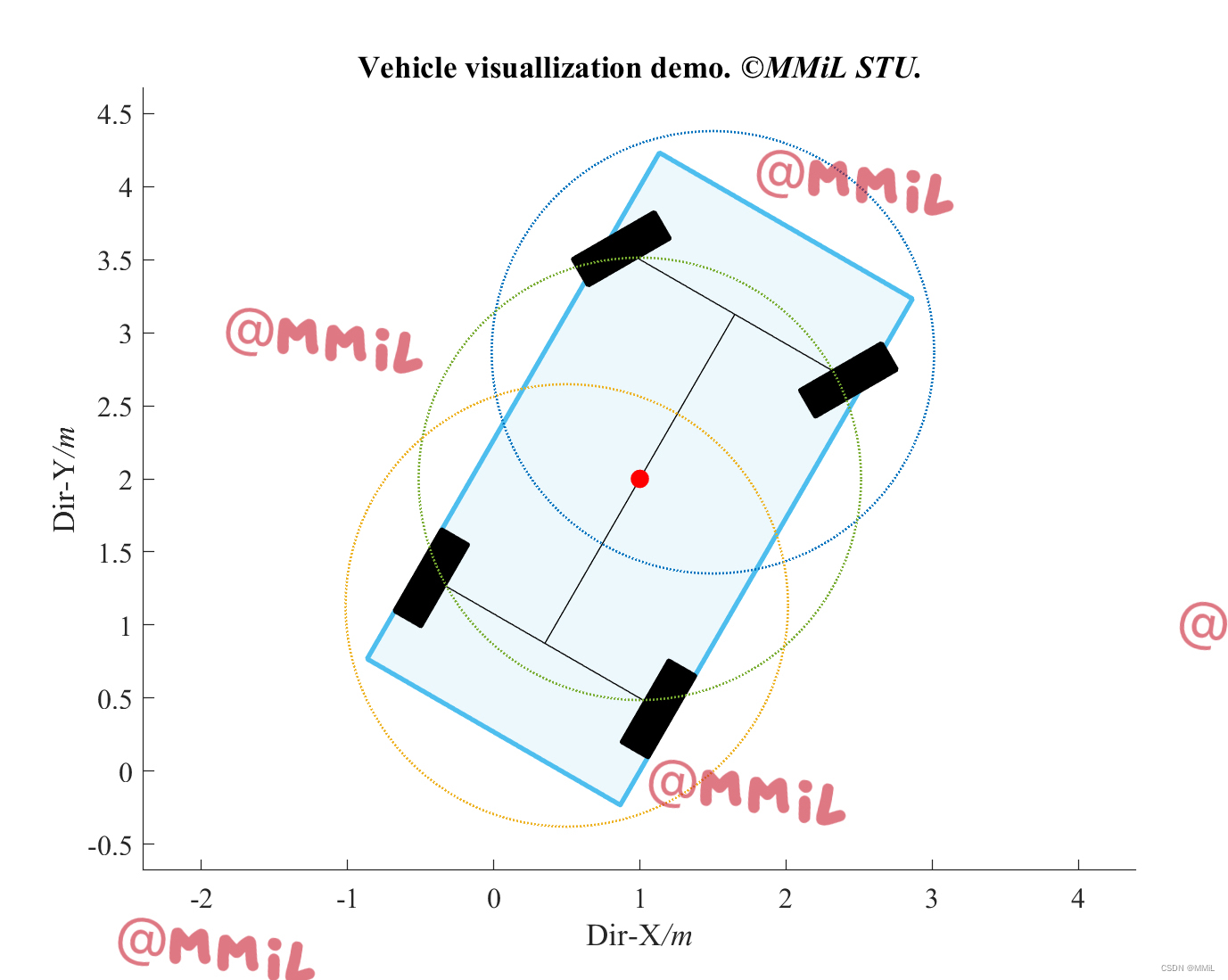
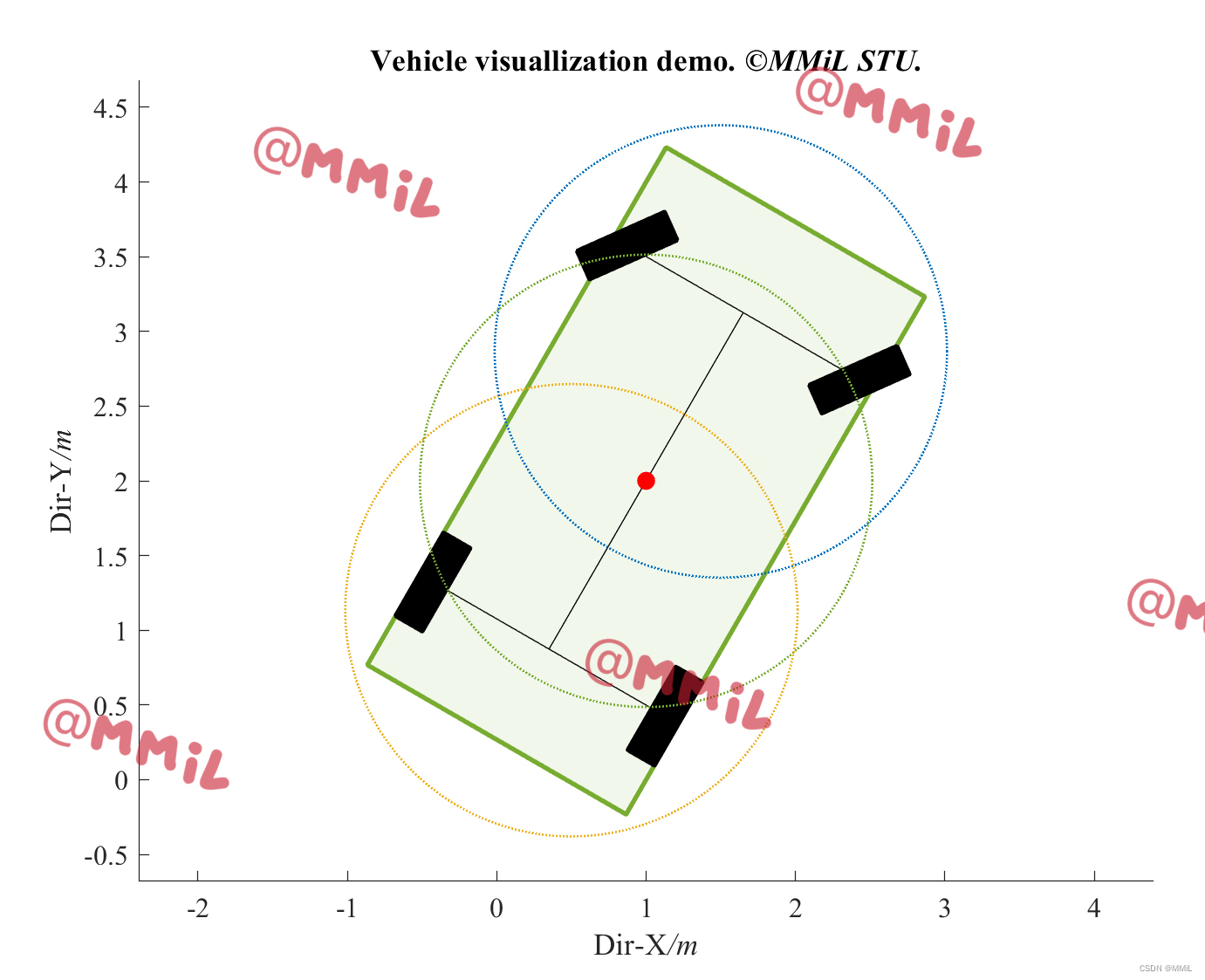
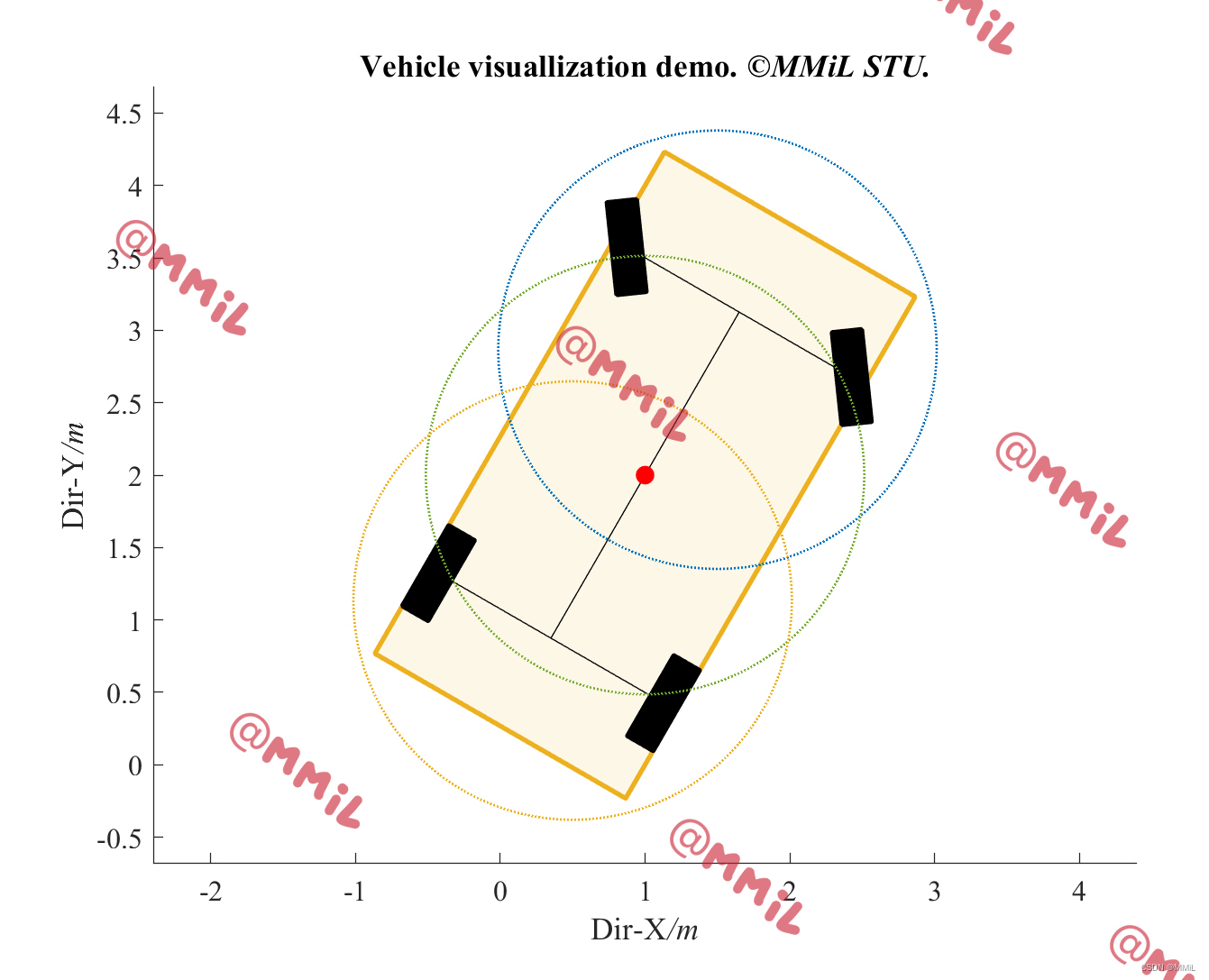
在可视化时,抛去车辆的外形,需要将车辆的重要状态信息表示出来: 车辆的位置坐标,航向角,方向盘转角(轨迹跟踪控制中常见的控制量),速度信息。此外,如果车辆采用了避障算法,如三圆检测,轮廓膨胀等,需要实时将车辆的碰撞检测轮廓表示出来,效果会更加的直观。
1. Codes & Visuallization
codes overview
veh paras. setting
function Veh_CofigSetting(obj)
% set the veh_paras
obj.veh_cfg.Veh_L=4;
obj.veh_cfg.Veh_w=2;
obj.veh_cfg.rear_bumper_to_rear_axle = .7;
obj.veh_cfg.front_bumper_to_front_axle = .7;
obj.veh_cfg.wheel_base = 2.6;
obj.veh_cfg.half_width = 1;
% 轮胎参数(205/55R 16)
obj.veh_cfg.Tire_L=0.64; % 轮胎直径(静止)
obj.veh_cfg.Tire_W=0.205; % 轮胎宽度
% lf and lr are the front and rear
obj.veh_cfg.lf=1.4;
obj.veh_cfg.lr=1.2;
endveh vis.
function show_vehicle_rt(obj,todo_veh_sts,Fig_Num)
% Old style case
obj.plot_handle_list=[];
% veh pos shift
obj.vis_vehicle_sts=todo_veh_sts;
% veh_sts need to be row-vector
Veh_CofigSetting(obj); set_color_matrix(obj)
Veh_Shape_Prototype(obj);
Veh_Shape_Shift(obj);
% preallo.
figure(Fig_Num)
for h=length(obj.shift_polyshape_list):-1:1
if h==1
% plot the vehicle body
cor_id=obj.veh_face_color_id; face_alpha=.0; edge_alpha=1.0; LineW=1.0;
elseif h==9
% veh part face
cor_id=obj.veh_face_color_id; face_alpha=.3; edge_alpha=0.0; LineW=1.0;
elseif h>=2 && h<=5
cor_id=8; face_alpha=1.0; edge_alpha=1.0; LineW=2;
elseif h>=6 && h<=8
cor_id=8; face_alpha=0.0; edge_alpha=1.0; LineW=.4;
end
if obj.Vis_case_switch=="old_style" && h>=2; break; end
cuur_veh_ele_handle=plot(obj.shift_polyshape_list(h,1), 'FaceColor', obj.color_List(cor_id,:),'FaceAlpha', face_alpha,'EdgeColor',obj.color_List(cor_id,:),'EdgeAlpha',edge_alpha,'LineWidth',LineW);
% save the poly. handle
obj.plot_handle_list=[obj.plot_handle_list;cuur_veh_ele_handle];
hold on;
end
if obj.Show_Colli_circle=="ON"; circle_handle_list=Plot_circle(obj,Fig_Num); obj.plot_handle_list=[obj.plot_handle_list;circle_handle_list];end
if obj.Basic_fig_infor_switch =="ON"
axis equal;
xlabel('Dir-X\it{/m}');ylabel('Dir-Y\it{/m}'); title("Vehicle visuallization demo. \it{\copyrightMMiL STU.}",'FontWeight','bold');set(gca,'FontName','times new roman','FontSize',12);
end
if obj.Veh_CoG_switch=="ON"; scatter_handle=scatter(todo_veh_sts(1,1),todo_veh_sts(1,2),60,'Marker','o','MarkerFaceColor',[1 0 0],'MarkerEdgeColor','none','MarkerFaceAlpha',1.0);hold on;
obj.plot_handle_list=[obj.plot_handle_list;scatter_handle];
end
end这里构建了几个常见的可视化配色,见下:
欢迎大家分享和讨论,一起进步。



















 327
327

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











