




经过上面两章的学习后,我们有了对规划的更新一步的认识了,现在我们要看commander命令脚本的部分,这里我们通过moveit_commander的python包来完成对应运动规划,笛卡尔路径的计算以及拾取和放置。
体验
启动demo环境,启动对应的命令的脚本:
roslaunch panda_moveit_config demo.launch
rosrun moveit_commander moveit_commander_cmdline.py
总体来说,它是一个命令行界面来实现控制的。
use panda_arm
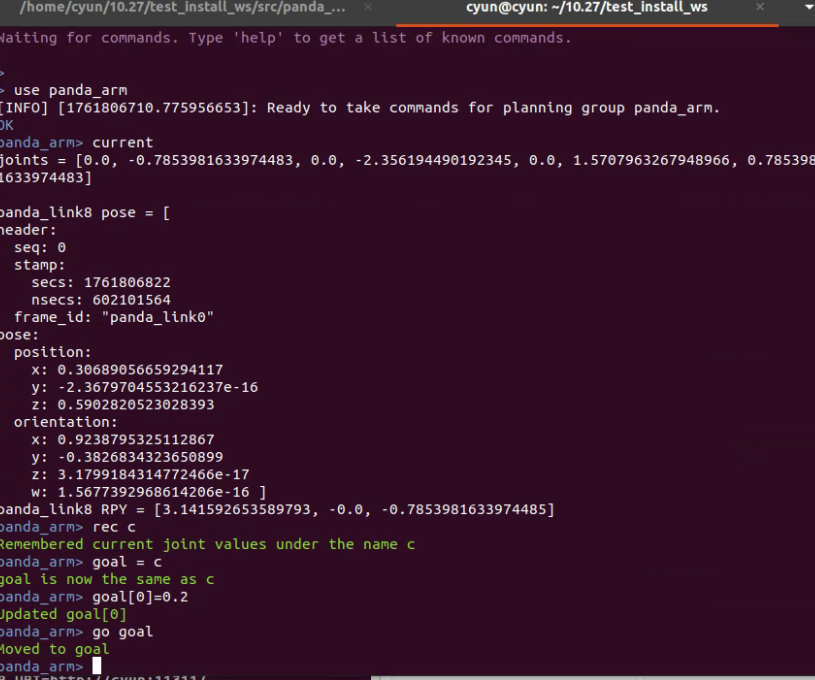
此命令 current 将显示组的当前状态:
current
要以特定名称记录该状态,您只需键入:
rec c
这将记住名为 c 的机器人组的当前关节值。类似 Matlab 的语法可用于修改关节值。上面的代码将 c 的联合值复制到一个名为 goal 的新变量中。然后,我们将目标的第一个关节修改为 0.2。您可能需要使用不同的值而不是 0.2(它需要在允许的范围内并且不会导致冲突)。go 命令计划一个动作并执行它。
要让机器人移动,您可以输入,例如:
goal = c
goal[0] = 0.2
go goal
除了调用 go,您还可以键入:
goal[0] = 0.2
goal[1] = 0.2
plan goal
execute
这效率稍低,但优点是 plan 命令允许您在实际发出 execute 命令之前在 RViz 中可视化计算的运动计划。
有关受支持命令的列表,您可以键入 help。要退出 moveit_commander 界面,您可以键入 quit。



















 1112
1112

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











