




一、问题描述
进入文件夹,编译包
roscore
cd my_c++/VINS_test/BUAA_robot/src/Sensors
catkin_make -DCATKIN_WHITELIST_PACKAGES=""
source devel/setup.bash
roslaunch hardware_trigger_cam camera.launch
报错:
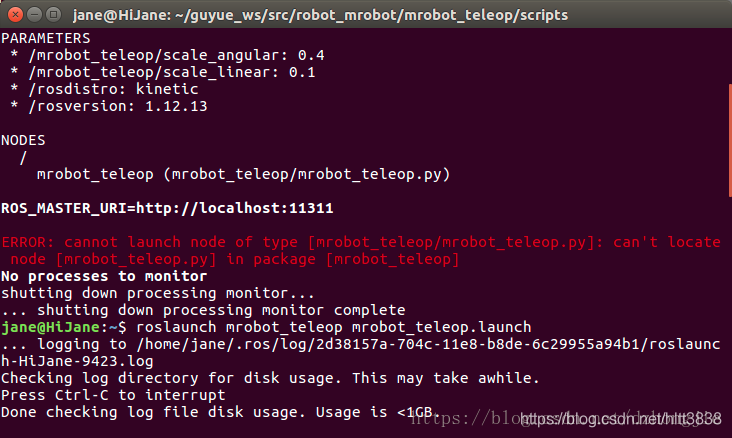
 博客内容描述了在ROS环境中遇到的权限错误以及如何解决。作者首先尝试通过修改文件夹权限来解决问题,但未成功。随后,他们发现编译后的可执行文件位于上一级目录的build中,并将其移动到相应包内,执行`source devel/setup.bash`及`roslaunch`命令后,成功启动了程序。这个解决方案对于遇到类似问题的ROS用户可能有所帮助。
博客内容描述了在ROS环境中遇到的权限错误以及如何解决。作者首先尝试通过修改文件夹权限来解决问题,但未成功。随后,他们发现编译后的可执行文件位于上一级目录的build中,并将其移动到相应包内,执行`source devel/setup.bash`及`roslaunch`命令后,成功启动了程序。这个解决方案对于遇到类似问题的ROS用户可能有所帮助。
 711
1万+
711
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


























