



VALERI ‐ 一种用于航空航天生产的协作式移动操作器
豪赫·萨恩斯、费利克斯·彭茨林、克里斯蒂安·福格尔和马库斯·弗里茨舍德国马 格德堡桑德托尔大街22号,39106,弗劳恩霍夫工厂运行和自动化研究所IFF
VALERI 是一种移动机械臂,专为在航空航天生产设施中与操作人员协作而设计, 可在无需隔离防护栏的情况下执行多种任务。本文将介绍该项目中开发的三个用例 应用之一,并基于这些特定应用,探讨如何应对移动机械臂的风险分析,因为移动 平台和工业机器人存在不同且部分相互矛盾的标准。弗劳恩霍夫IFF研究所根据风 险分析的结果,专门开发了两种用于移动式机械臂安全与交互的传感器技术,相关 开发工作也将在文中进行描述。当移动操作能够无缝集成到现有生产流程中且所需 改动最少时,其效果最佳。对于此类柔性机器人可能涉及的广泛应用而言,确保安 全性仍将是未来工作的挑战。我们希望 VALERI 项目的工作能够为确立最佳实践 提供基础,并推动针对移动操作具体需求和风险的标准化未来工作。
1. 引言
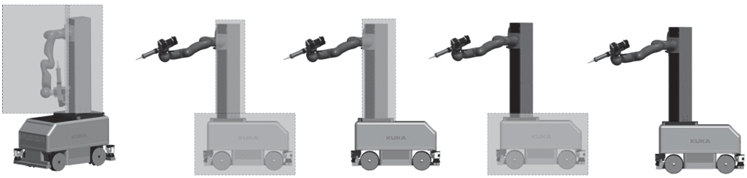
VALERI代表“工业应用先进协作机器人验证”,是该项目的名称,由位 于德国马格德堡的弗劳恩霍夫工厂运行和自动化研究所(IFF)发起并协 调。在2012‐2015年间,该联合体由工业终端用户空中客车DS和FACC、 工业机器人制造商库卡机器人有限公司、系统集成商IDPSA以及研究合作 伙伴PROFACTOR有限公司和PRODINTEC组成,致力于将移动操作技 术引入航空航天生产的工厂车间。在项目初期,工业终端用户确定了大量 应用场景和用例,其中移动式机械臂可用于执行非人体工学的、单调的任 务,或在整个生产过程中重复出现的任务——从而使得单个移动机器人能 够在大量独立的工作站上执行任务。目标是让机器人能够协同工作
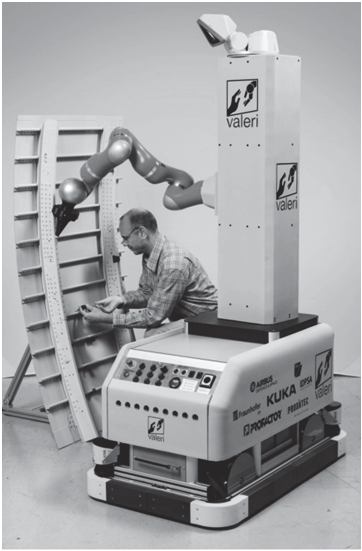
在人类旁边(图1),无需围栏或隔离屏障,使人类和机器人能够在彼此 独立完成工作的同时,仍在近距离或同一部件上协同作业。
除了项目协调外,弗劳恩霍夫IFF研究所还负责机器人系统的安全性。
这包括在项目初期进行风险分析,识别缓解措施(例如在特定情况下为机 器人增加附加传感器),以及对安全措施的验证,特别是针对采用功率和 力限制作为保护方式的安全措施。
在项目初期,针对移动机械臂安全分析存在多项不同的、部分相互冲 突的标准。一方面,移动平台本身可被视为自主导引车(AGV),其使用 主要由欧洲标准EN 1525——“工业车辆安全——无人驾驶车辆及其系统” 所涵盖。另一方面,工业机器人的相关安全标准包括ISO 10218《机器人 及机器人设备——工业机器人安全要求》第1和第2部分,以及最近发布的 ISO/TS 15066《机器人及机器人设备——协作机器人》。
2. VALERI机器人系统的概述及用例应用
在接下来的部分中,将介绍VALERI机器人系统以及密封剂应用的使用案例。
2.1. 移动机械臂
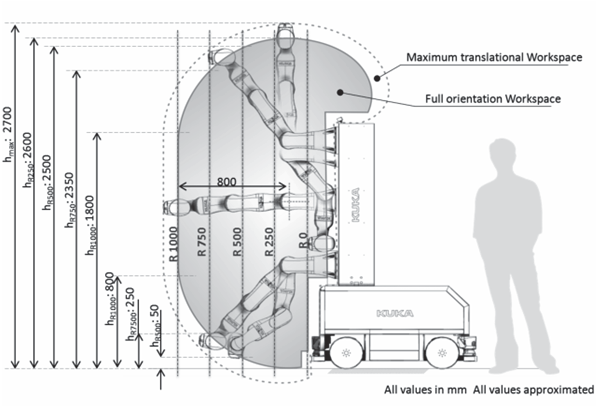
VALERI机器人基于KUKA omniRob平台。该平台由联盟合作伙伴 KUKA Labs进行改造,增加了一个可旋转的直线轴,并将轻型机器人 (LBR)安装于其上。这种工作空间扩展是为了使VALERI系统能够触及 最初考虑作业的所有部件。总体而言,VALERI拥有12个自由度,可协调 运作,形成一个完整的系统。
在项目初期,omniRob平台的对角位置已配备两台SICK S300 CMS专业激光扫描仪。每台扫描仪设有四个可切换的区域,用于警示和紧 急停止区域。扫描平面距地面高度约为140毫米。
2.2. 使用VALERI机器人进行密封剂应用
在项目初期,工业终端用户从其生产过程中确定了多种可能的应用,这些 应用适合使用VALERI移动机械臂进行测试。这些应用包括物流任务(拾 取与放置)、配货、零件检测(使用摄像头或其他类型的传感器——包括 接触式和非接触式)、钻孔、微铣削、铆接以及涂敷密封胶。在项目进行 过程中,开发了三个不同的用例,分别是密封剂应用、已涂敷密封剂的检 测,以及使用Profactor传感器对编织碳纤维增强塑料零件的进一步检测。
这三种工艺的运行速度和具体风险非常相似。因此,本文将重点讨论密封 剂应用这一用例。
2.2.1. 将密封剂应用作为用例的动机
在航空航天生产中,密封剂用于减少腐蚀、防止湿气进入敏感区域,并形 成密闭的飞机结构,这是维持高空飞行时舱内压力所必需的。密封剂几乎 应用于所有的配合面和连接面,是航空航天生产中一项非常重要的工艺。
该应用场景被特别选定,因其在整个生产过程中具有高度重复性,目标是 使VALERI能够以灵活的方式对不同部件进行密封剂涂敷,从而即使每天 生产的部件数量较少,VALERI系统仍可通过灵活处理多个部件而具备经 济性。
2.2.2. 测试部件和环境条件
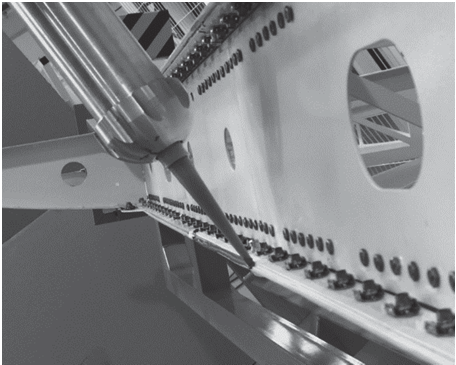
在该项目中,我们的重点是在猎鹰飞机的水平尾翼(HTP)扭力盒上涂敷 密封胶。VALERI系统使用的密封剂是一种双组分低密度密封胶,通过筒 仓混合后,再由注胶枪进行涂敷。
该环境是一个常规的工业车间,具有平整光滑的混凝土地面、高天花 板(超过4米)和标准工业照明。HTP周围约有2米的开放空间,以便机器 人为其提供充足的操作空间。此外,该区域还设有足够的固定参照物,可 在HTP周围实现精确(约+/‐1毫米)的基于激光雷达的导航。
西班牙的联盟合作伙伴IDPSA负责开发了一款可供VALERI使用的密 封剂施加工具。为使工艺尽可能简单,采用了预混合Semkit筒。根据所 需的密封剂厚度、喷嘴几何形状(开口为Ø 4‐8 mm)以及密封剂的粘度, 在直线上施加密封的运行速度约为10‐35 mm/s。速度过快会导致密封剂 外观质量下降、出现缝隙或气泡。该运行速度在风险分析中具有重要意义, 因为它基本代表了工艺所要求的机器人相对于静止部件的最大速度。
2.2.3. 操作员角色定义和完整工艺链规范
完整任务通过事件驱动流程链进行分析,并被分解为更小的独立步骤。该 方法不仅实现了对工艺序列中各个步骤的全面映射,例如从机器人原点站 移动到HTP起始位置,执行换刀以使用密封剂施加工具,等,还涵盖了操 作员在每个运行阶段的角色以及各阶段的预期用途。此类事件驱动
流程链取决于其后续用途。我们发现,为了进行风险分析,流程链中的每 个独立环节在操作员的预期用途以及运动中的机器人组件方面都需要保持 一致。
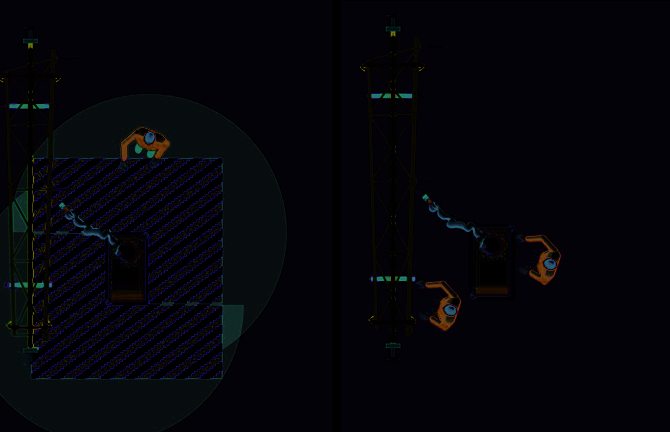
表1根据不同的运行阶段给出了操作员预期用途的一些示例定义。
| 运行阶段 | 操作员的预期用途 |
|---|---|
| 调试 | 通过触觉交互与全部12个自由度进行任务定义;使用游戏手柄 用于地图创建以及任务定义过程中的平台移动。 |
| 自主的 平台移动 | 不打算与机器人发生接触。该平台完全 自主的。 |
| 密封剂应用 | 不打算与机器人发生物理接触。该平台和 机械臂完全自主运行。操作员有机会 必要时,可通过用户暂停/中断机器人操作 界面或通过直接的触觉交互。 |
3. 移动机械臂的风险分析
风险分析的基础是DIN EN ISO 14121以及欧盟机械指令。借助这些指南 和标准,我们能够采用系统化方法[1]来确保协作应用中的安全。作为起 点,机器人的原始设计遵循了协作机器人的一般设计原则(例如无尖锐边 缘),各个工艺步骤已建模(在本案例中使用事件驱动流程链),并通过 预期用途的定义推导出人机协作(HRC)的整体要求。接下来的步骤包括 危险识别、风险分析,以及消除危险和/或降低风险的措施,最终对防护 措施的有效性进行验证。
3.1. 危险识别
根据事件驱动流程链中的各个独立模块识别了危险源。在考虑移动平台和 机器人机械臂时,最常见的危险是人体被挤压或压伤,这种伤害可能发生 在机器人自身的运动学结构内部,或机器人与环境及待加工部件之间。特 别是我们注意到,在密封胶工具运行期间需要对其进行安全防护,以防止 人体手指或手部被夹在密封胶工具的喷嘴与部件之间。
此外,工业终端用户希望允许操作员靠近机器人,以便在同一个部件上继续 执行他们自己的任务,并且
允许操作人员或手推车在零件之间的相对狭窄通道中通过。如前所述, HTP部件周围大约有2米的净空距离。考虑到平台的长度和宽度约为1 200毫米 x 720毫米,因此留给操作人员或手推车通过的空间仅有 800‐1280毫米。在此工艺链步骤中使用激光扫描仪进行安全防护被认为在 工业上不可接受,因为根据EN ISO 13855“机械安全—防护装置相对于人 体各部位接近速度的定位”规定,安全区域将导致通道实际上被关闭。如 果操作员靠近机器人并在狭窄空间内通过,机器人将必须停止所有动作。
使用激光扫描仪或触觉传感器时,操作人员与VALERI机器人之间所需的 安全距离差异如图4所示。
3.2. 移动机械臂的分解
为解决自主导引车与工业机器人不同标准之间的一致性问题,我们进一步 分解了机器人组件,即移动平台、LBR和直线轴(图5)。随后利用这些 信息更新了事件驱动流程链。然后我们认为仅由移动平台执行特定任务的 情况应遵循EN 1525标准——“工业车辆安全——无人驾驶车辆及其系统”。
所有其他情况下,当机器人机械臂单独或与其他自由度组合运行时
在操作中被认为符合ISO 10218和ISO/TS 15066的要求。
这导致在机械臂运行期间,即使与人体接触的是平台,发生碰撞和夹 紧情况时的限值也更为严格(150 N 对比 400 N)。
3.3. 风险降低措施
基于风险分析和工业要求,开发并应用于VALERI系统的两种新型传感器 系统。一种是覆盖机器人较大表面的触觉传感器系统,另一种是位于直线 轴上方的光学工作空间监控系统,该系统配备云台装置,可在密封剂应用 过程中跟踪工具并确保其安全。
这些组件已在其他文章中描述过,此处仅作简要说明。
3.3.1. 触觉传感器
触觉传感器[2][3]具有空间分辨率,并由缓冲层保护,已安装在VALERI的以下 表面:
- 在omniRob平台周围,
- 以平台底部的保险杠环形式,
- 在直线轴(工作空间扩展)的三个侧面,
- 在轻型机器人 (LBR)底座周围。
在密封剂应用过程中,触觉传感器均根据功率和力限制来保障平台移 动的安全。在交互模式下,直线轴上的触觉传感器充当使能开关,而其他 触觉传感器则提供运动的矢量和速度。
使用模拟人腿物理特性的生物保真碰撞测试装置对触觉传感器进行了 验证,并确定了最大平台速度为100毫米/秒。由于密封剂只能以10‐35 mm/s的速度进行涂覆,因此在功率和力限制期间允许的最大平台速度不 会不必要地限制工艺过程。
3.3.2. 光学工作空间监控系统
光学工作空间监控系统[4]采用速度与距离监控的防护模式,以在施加密 封剂时保护工具运动。该传感器系统由立体相机系统与飞行时间(ToF) 相机组合而成。使用这两种传感器技术具有优势,因为一种传感器可以弥 补另一种传感器的缺点。
3.4. 分解对防护措施的影响
通过对机器人进行组件分解,我们定义了多个在完整任务过程中的特定时 间段内生效的安全传感器。因此,移动机械臂在同时采用不同防护方法的 多种安全传感器下运行。这种新颖的方法使我们能够更好地实现工业目标, 例如减少工艺中断,同时为车间中的操作人员提供更多空间,使其能够在 机器人附近自由移动。
4. 结论
本文简要介绍了VALERI机器人及其三种用例应用之一,以说明我们对移 动机械臂的防护方法。移动机械臂在机器人技术中属于特殊案例,因其结 合了工业机器人技术与自主导引车,带来了新的安全问题,并增加了复杂 性。目前,针对这两个组件(工业机器人和移动平台)的标准部分存在冲 突,且尚无专门适用于机器人技术这一新兴领域的标准。然而,该领域显 然需要更明确的指导,至少应以最佳实践的形式提供,甚至可能扩展到进 一步的标准化活动[5]。
尽管我们采用独立的专用传感器来保护系统的各个组件,在执行应用 时达到了所需的性能,但从技术和经济角度来看,该方案可能并非最优。
将触觉传感器双重用途化,既作为安全传感器,又作为用户交互手段,便 是此类灵活性的一个范例,这种灵活性在工作空间监控系统中同样具有实 用价值。
工作空间监控系统中各个摄像头的当前规范仅针对安全目的而设计,因此 无法实现有效的零件识别或与工艺的集成。然而,工作空间监控系统的未 来发展将对摄像头进行改进,以提供超越安全的增强的感知功能,从而能 够识别零件,并在线执行某些检测和过程监督。

















 26
26

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









