







 本文是《视觉SLAM十四讲》第2讲的读书笔记和实践记录,涵盖了Ubuntu操作系统安装、使用g++和cmake编译程序的基础操作,以及在Kdevelop中进行IDE集成和断点调试的初步体验。通过详细步骤,帮助初学者在实践中理解SLAM的基础知识。
本文是《视觉SLAM十四讲》第2讲的读书笔记和实践记录,涵盖了Ubuntu操作系统安装、使用g++和cmake编译程序的基础操作,以及在Kdevelop中进行IDE集成和断点调试的初步体验。通过详细步骤,帮助初学者在实践中理解SLAM的基础知识。
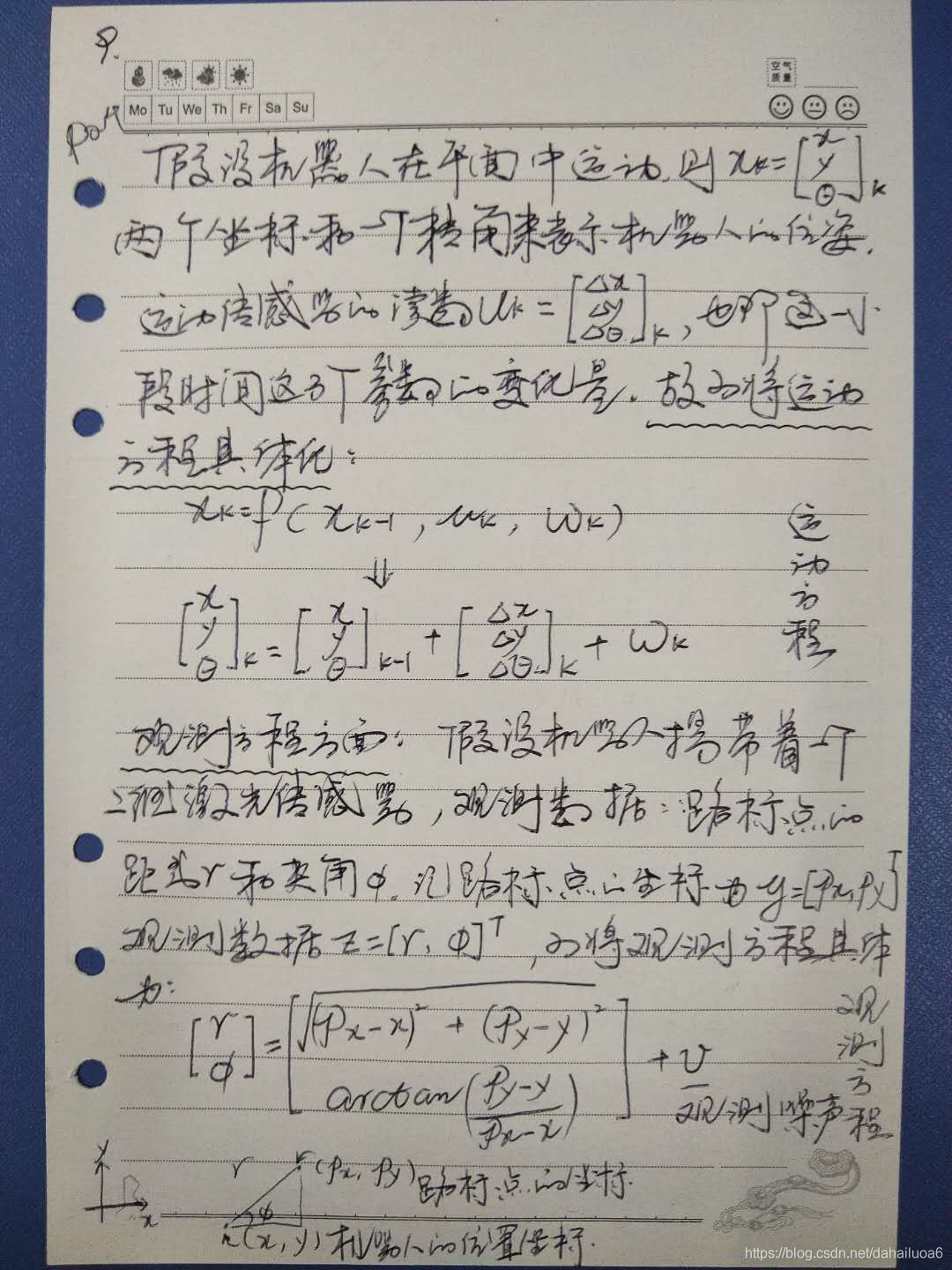
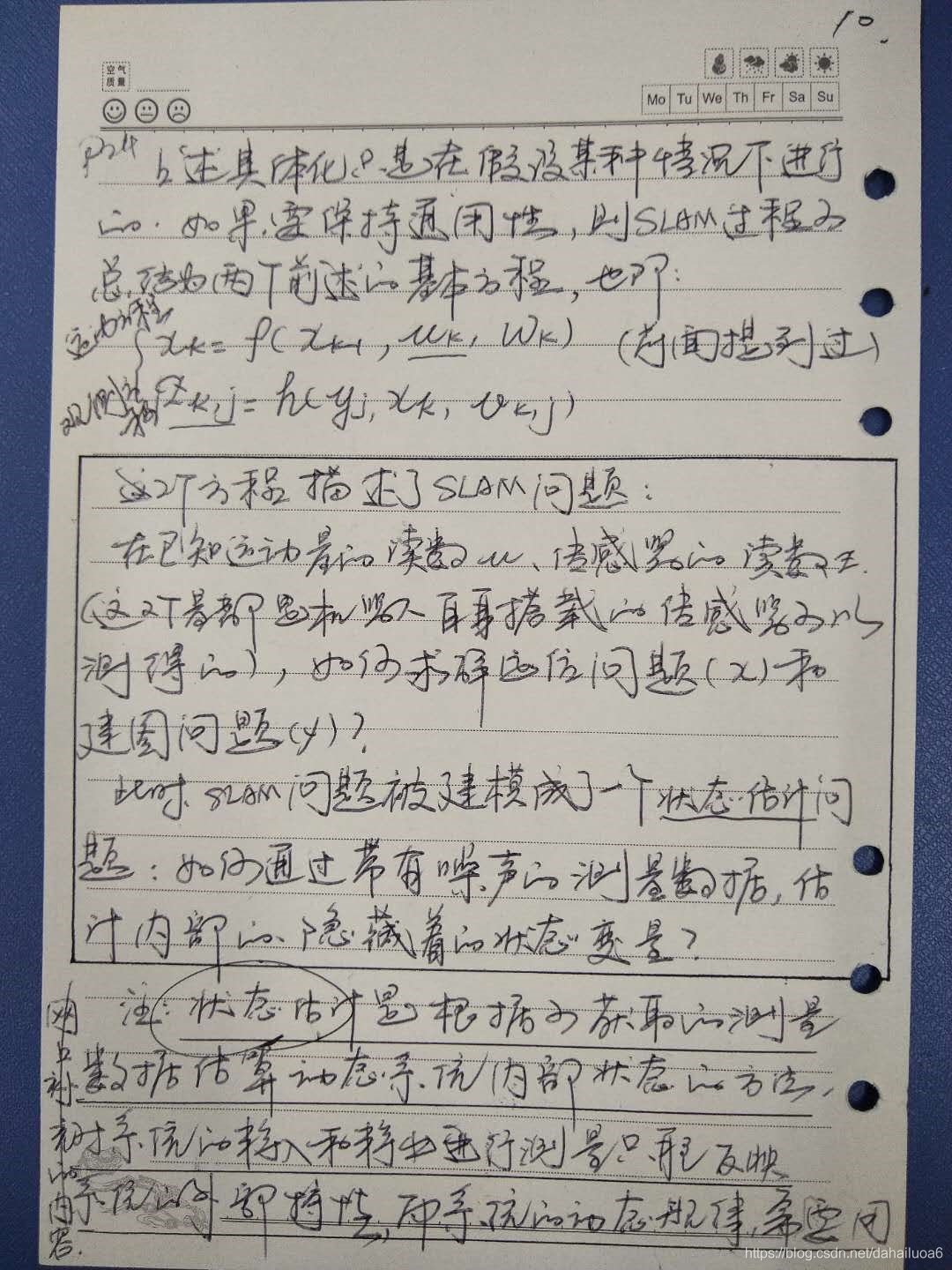
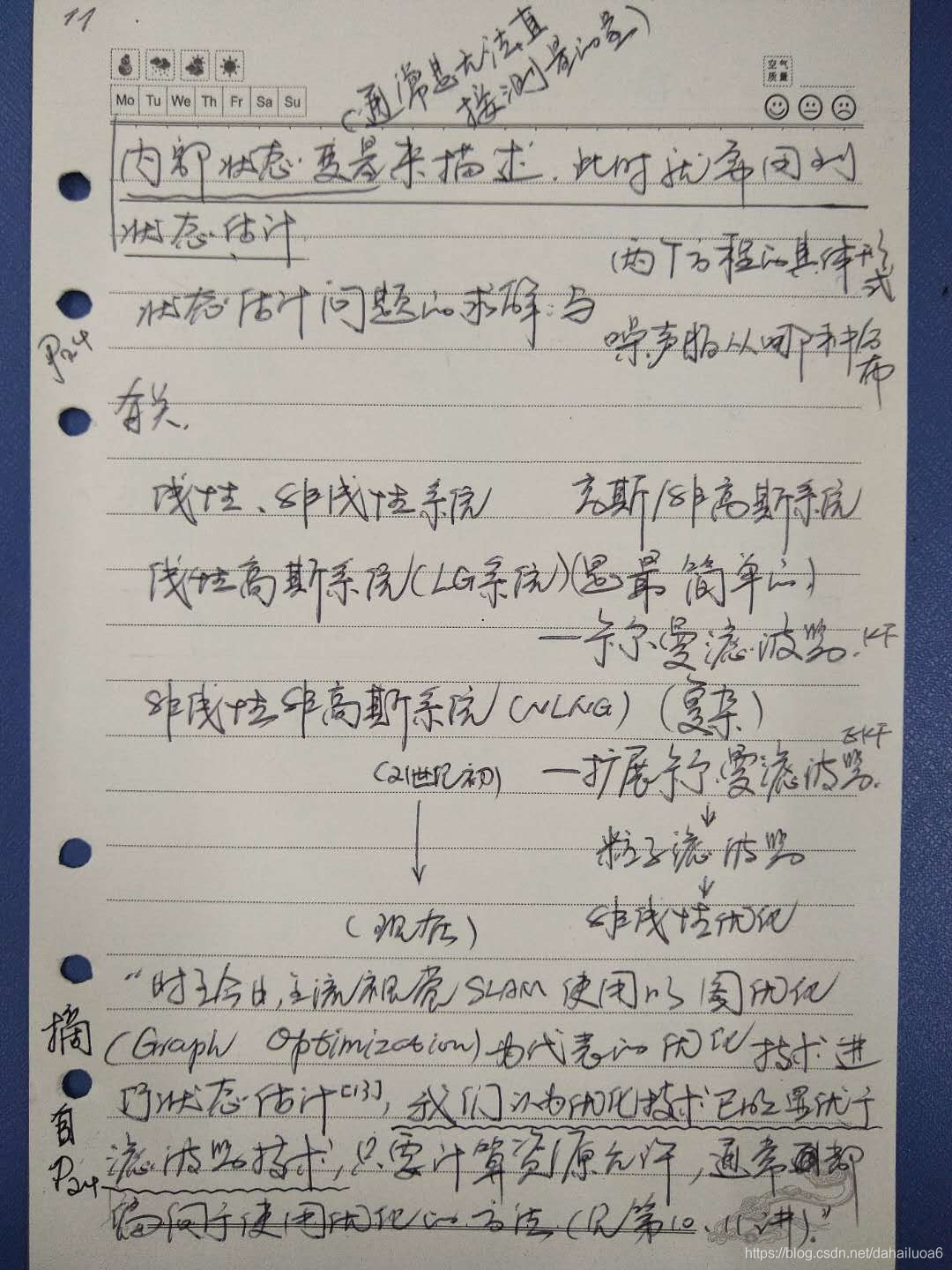
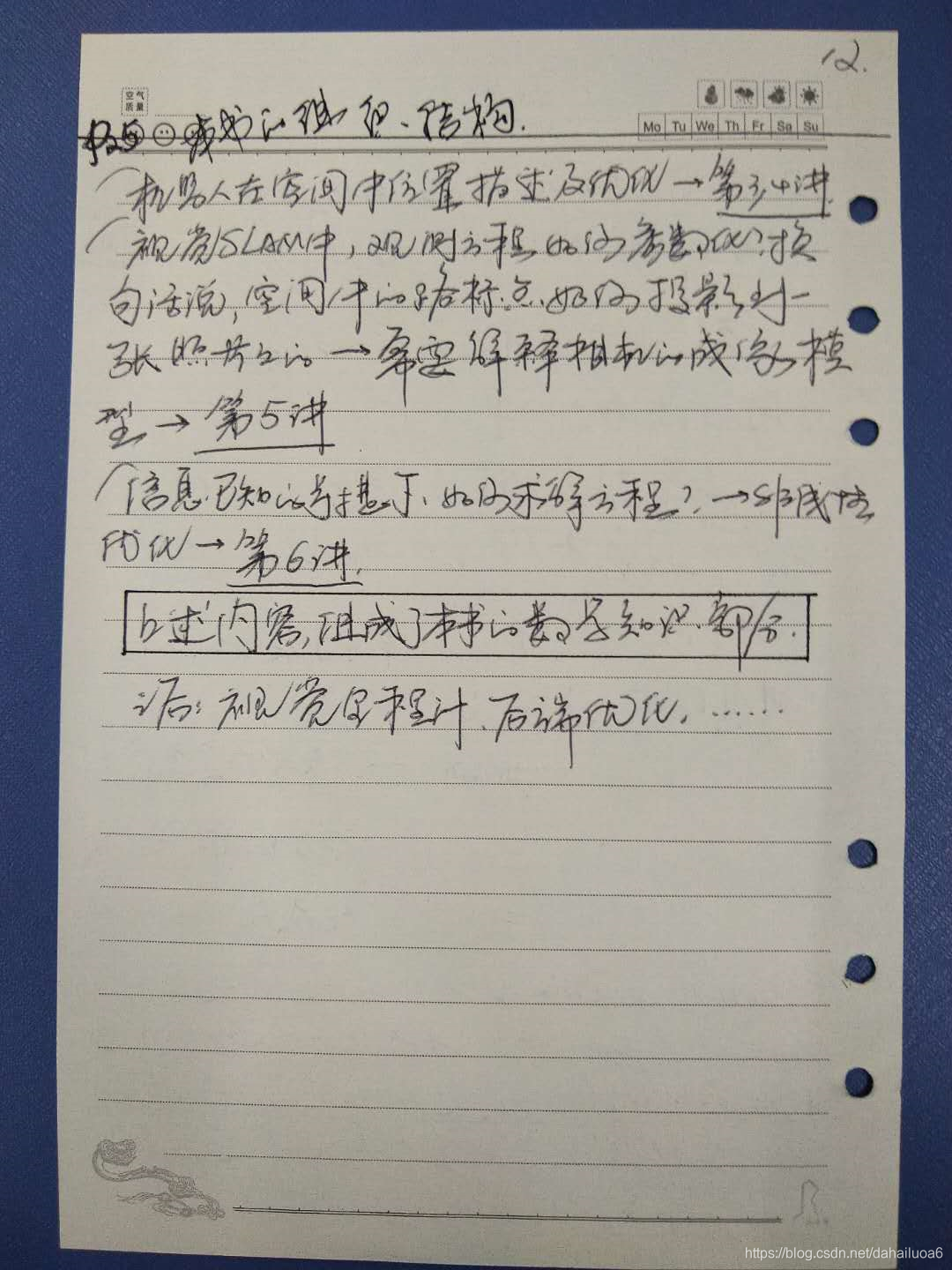
PART1 读书笔记(第2讲)

PART2 实践部分(第2讲)
2.4节是本讲的实践部分,涉及到的操作都很简单、很基础。但是,对于第一次接触Ubuntu系统的人而言,尽管书上的操作步骤写的十分详细,依旧可能会觉得一头雾水。此处记录本人的调试过程。
-
2.4.1 安装Linux(Ubuntu)操作系统
本小节讲述的是操作系统的安装。 -
2.4.2 Hello SLAM
本小节:用编译器g++来编译程序。
对应例程:
具体操作步骤:
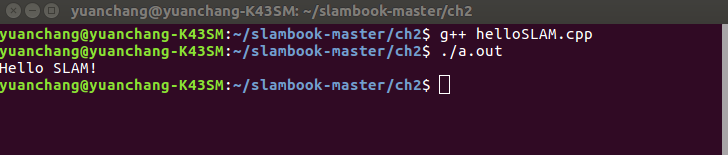
在helloSLAM.cpp所在路径下,右击鼠标,点击“在终端打开”,打开终端界面,并使当前运行路径是helloSLAM.cpp所在路径。
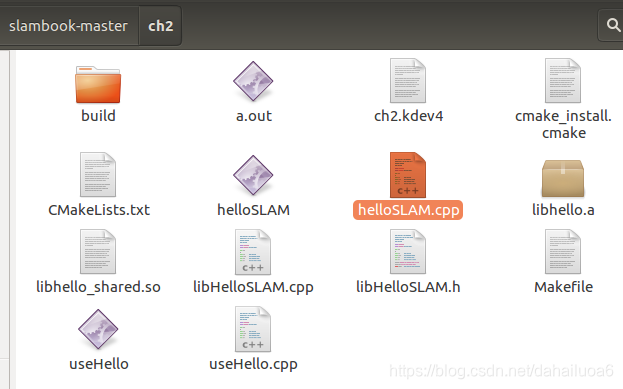
在终端输入g++ helloSLAM.cpp,之后按下回车键,可看ch2文件夹中生成最新的a.out(紫色菱形图标),之后继续在终端输入:./a.out,回车,看到终端有显示“Hello SLAM!",这就是该程序的运行结果。
-
2.4.3 使用cmake
本小节:用cmake来编译程序。
其一:cmake生成的中间文件和例程一个文件夹:
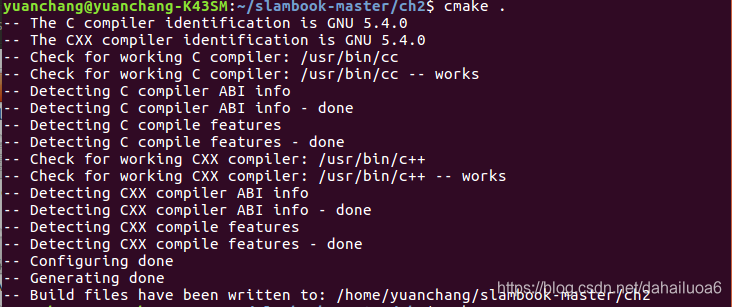
第一步:输入:cmake .,回车
第二步:输入:make,回车
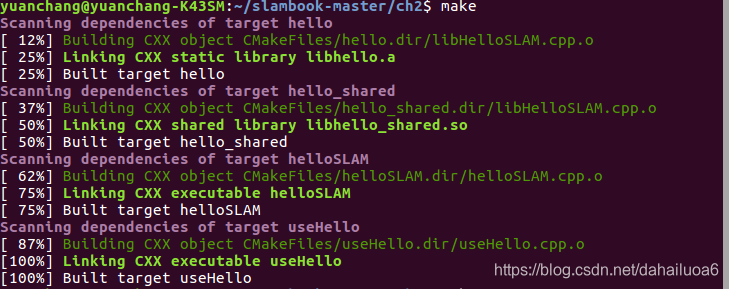
第三步:输入:./helloSLAM,回车

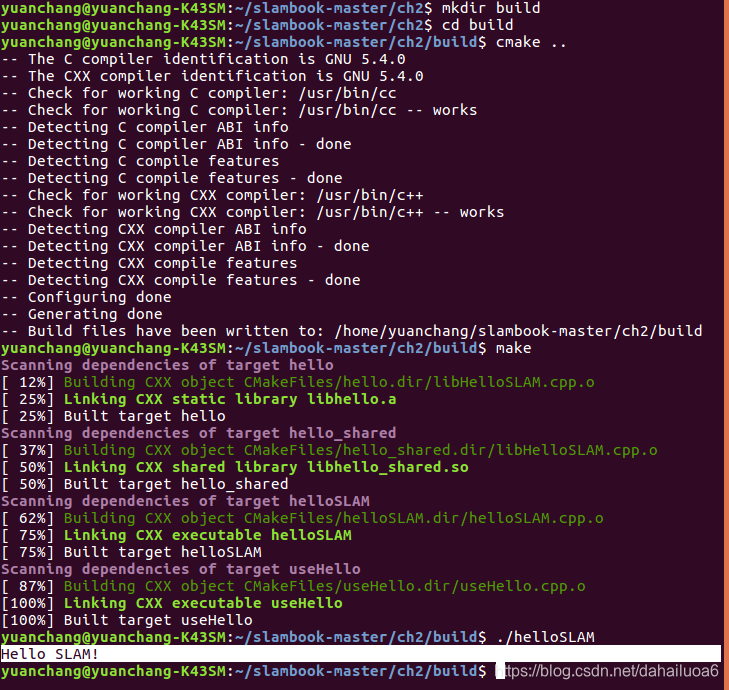
其二:cmake生成的中间文件专门一个文件夹,便于删除:
☆【注意】在做该实验时,应该将上一步cmake生成的一系列文件(如下图所示)删除,不然这一步运行会出错!
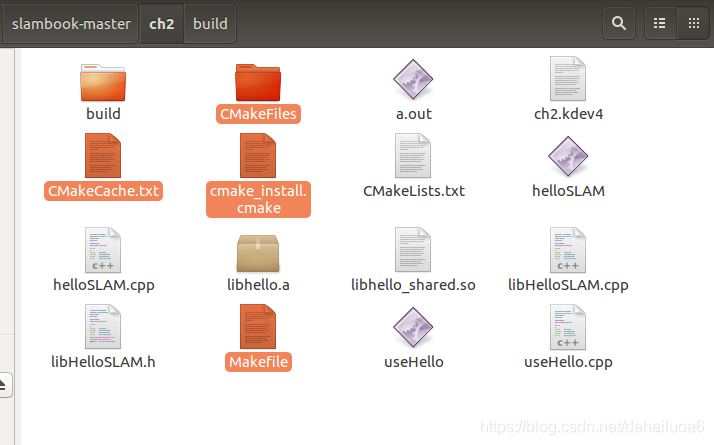
实验步骤:
输入:mkdir build,新建文件夹build
输入:cd build,进入文件夹build
输入:cmake …,(cmake+空格+英文句号+英文句号,注意是2个英文句号!此处由于优快云的问题可能显示出3个英文句号!),生成cmake中间文件在build文件夹中。
输入:make,编译
输入:./helloSLAM,得到运行结果Hello SLAM!
-
2.4.4 使用库

-
2.4.5 使用IDE(Kdevelop)
本小节涉及到Kdevelop的简单应用,包括和Cmake的结合及断点调试。具体操作可参考以下博客:
https://blog.youkuaiyun.com/qq_27806947/article/details/80119294

















 1613
1613

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









