



1. 欧拉角
1.1. 介绍
欧拉角是描述刚体相对于固定坐标系的方向的三个角度。旋转可以围绕原始坐标系的轴 x-y-z(假设保持静止,外在的),或围绕旋转坐标系的轴 x-y-z(内在的,与运动的物体固连),每次基本旋转后相对于外在坐标系改变其方向。
1.2. 横滚、俯仰和偏航
欧拉角通常表示为:
γ 或 φ,表示绕 x 轴的旋转
β 或 θ,表示绕 y 轴的旋转
α 或 ψ,表示绕 z 轴的旋转
1.3. 正规欧拉角和泰特-布莱恩角
存在十二种可能的旋转轴序列,可以分为两类:
正规欧拉角,其中一个旋转轴重复(x-z-x, x-y-x, y-x-y, y-z-y, z-y-z, z-x-z)
泰特-布莱恩角,围绕所有轴旋转(x-z-y, x-y-z, y-x-z, y-z-x, z-x-y, z-y-x)
有时,这两类序列都称为“欧拉角”。在这种情况下,第一组的序列称为正规或经典欧拉角。对于泰特-布莱恩角,有六种选择旋转轴的可能性。六种可能的序列是:
x-y'-z'(内在旋转)或 z-y-x(外在旋转)
y-z'-x'(内在旋转)或 x-z-y(外在旋转)
z-x'-y'(内在旋转)或 y-x-z(外在旋转)
x-z'-y'(内在旋转)或 y-z-x(外在旋转)
z-y'-x'(内在旋转)或 x-y-z(外在旋转):内在旋转称为:偏航、俯仰和横滚
y-x'-z'(内在旋转)或 z-x-y(外在旋转)
1.4 旋转矩阵
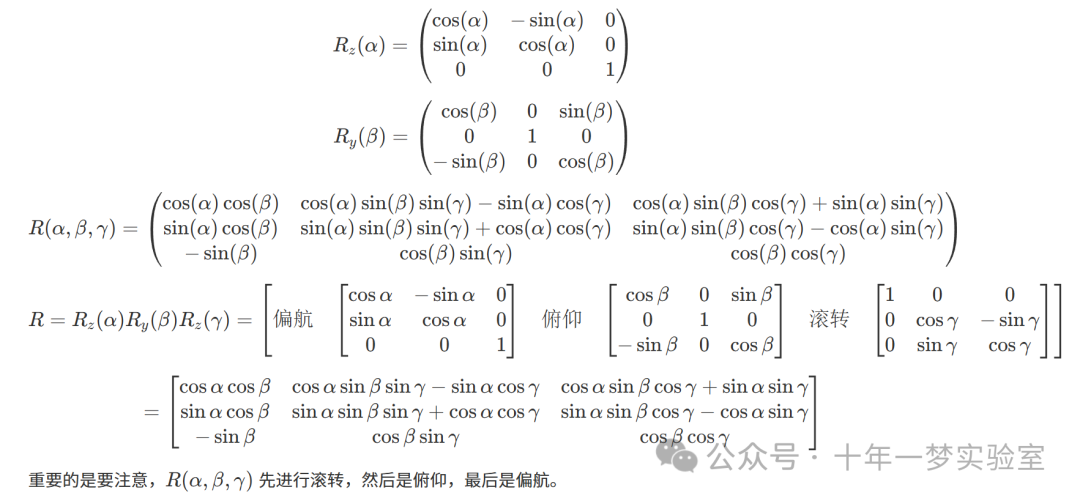
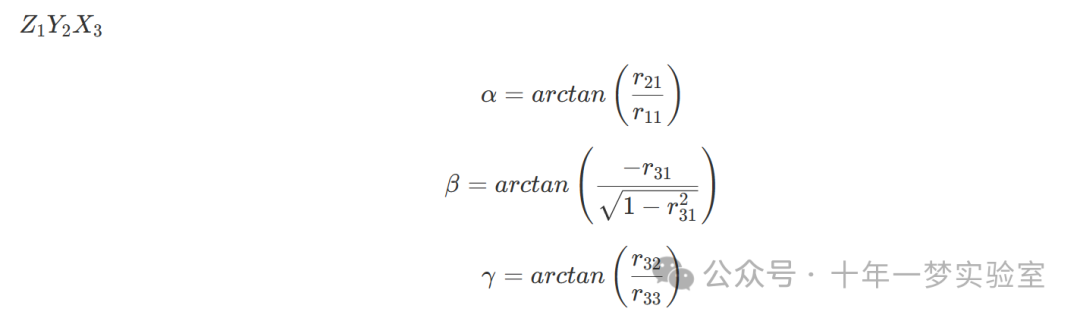
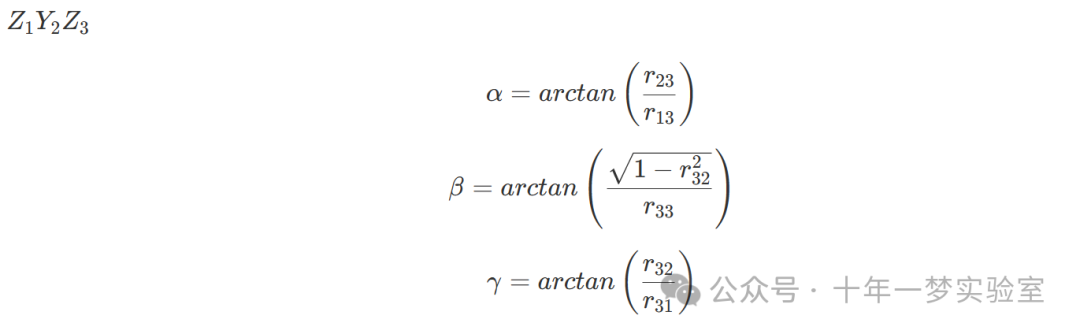
1.5 从旋转矩阵确定偏航、俯仰和滚转
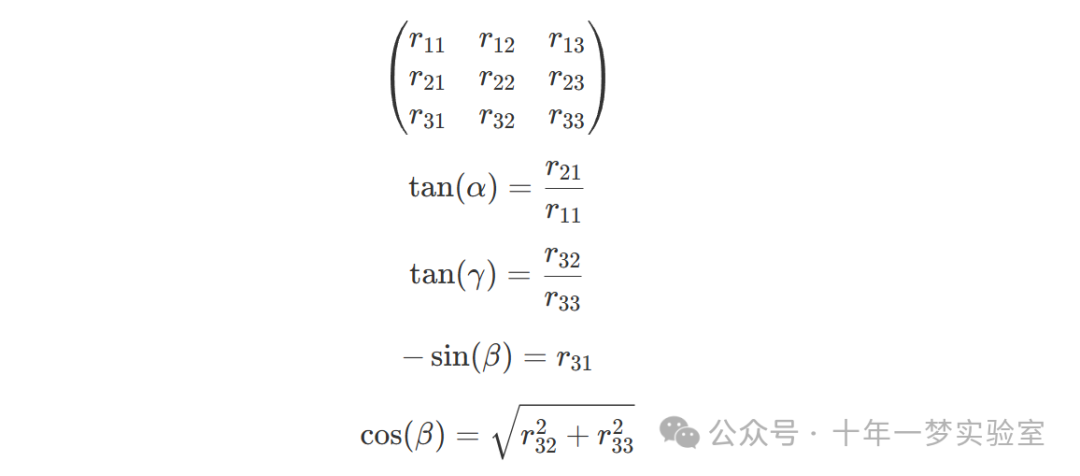
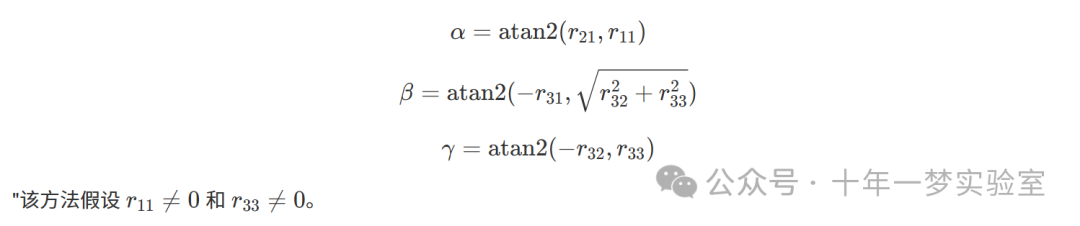
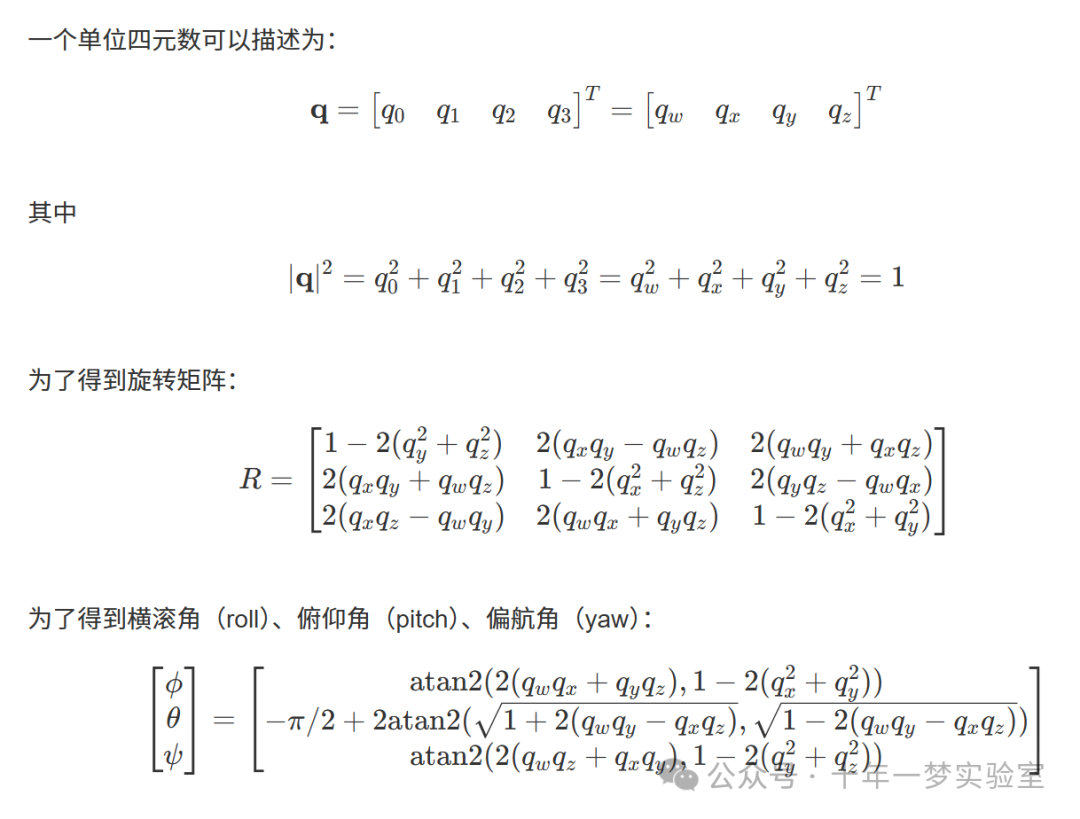
有四个象限可供选择反正切函数。每个象限应通过使用参数的分子和分母的符号来选择。分子的符号选择方向是在x轴的上方还是下方,分母选择方向是在y轴的左侧还是右侧。函数atan2可以为我们计算:
1.6 符号和范围

1.7 泰特-布莱恩角
1.8 等效的正欧拉角
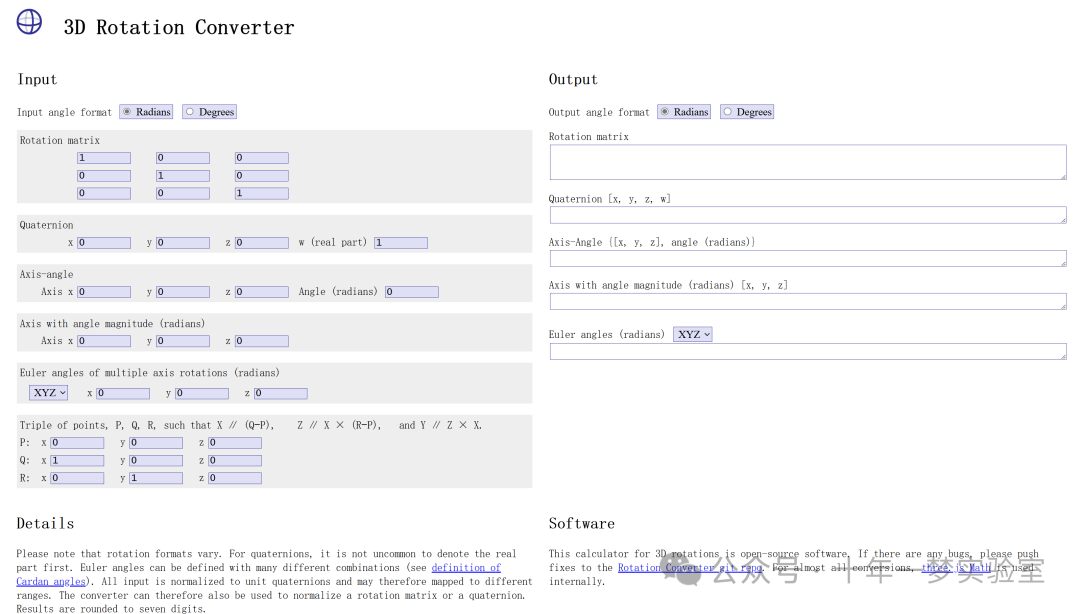
点击此处查看互动演示:
https://www.andre-gaschler.com/rotationconverter/
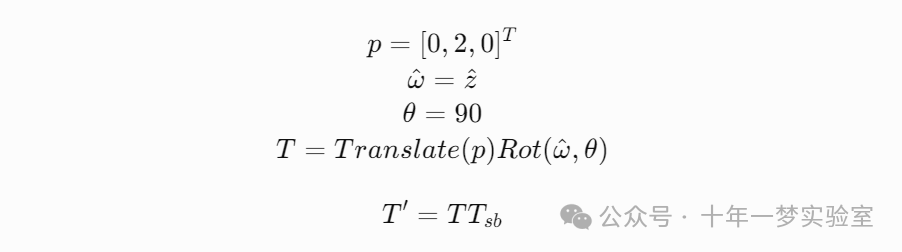
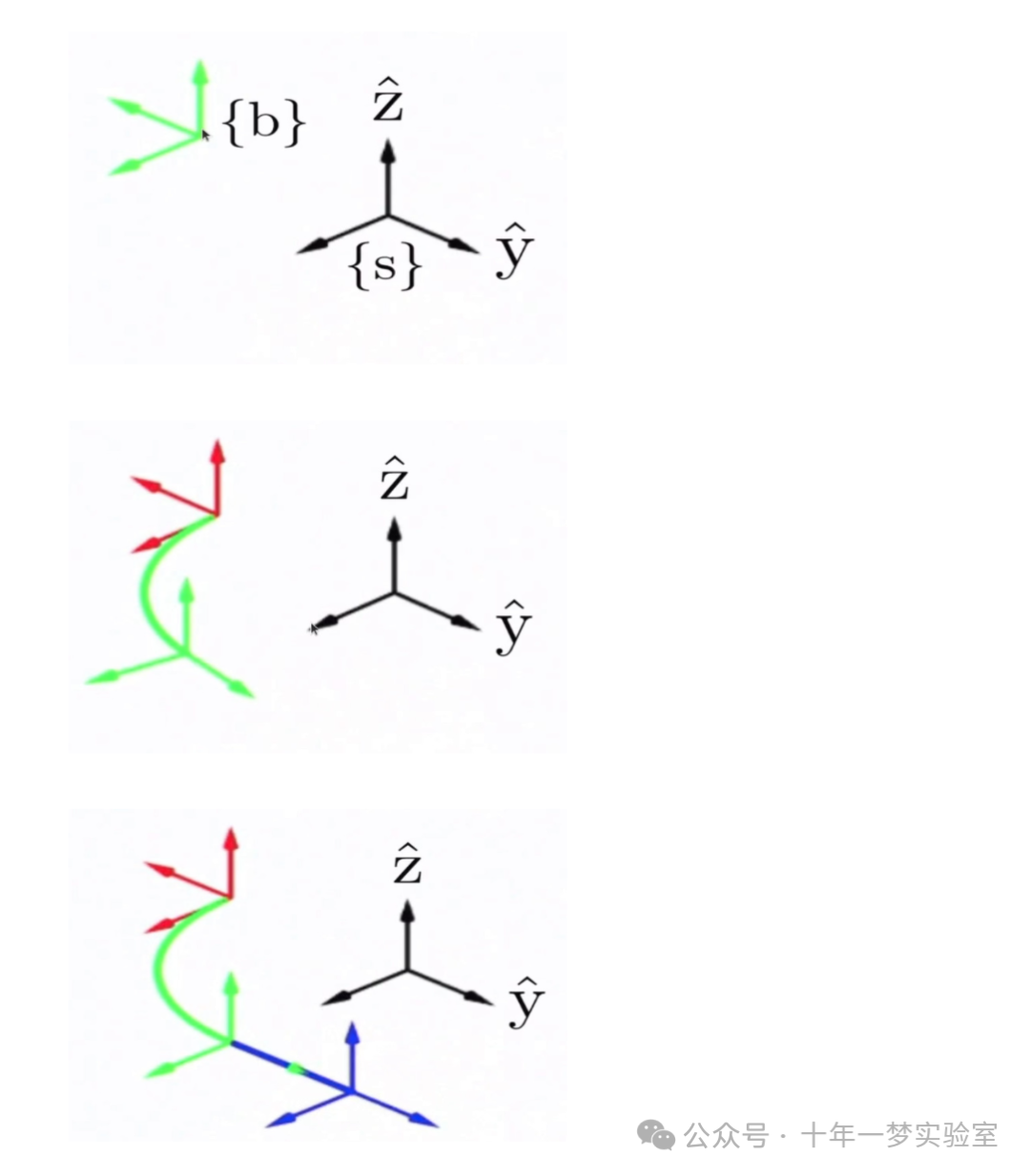
1.9. 旋转和平移在变换中的顺序
为了应用变换,首先我们在预乘的框架轴上应用旋转,然后我们在预乘的框架轴上再次平移
1.10. 万向节锁
角度 α、β 和 γ 是唯一确定的,除了奇异情况。如果 cos(β) = 0 或 β = ±π/2
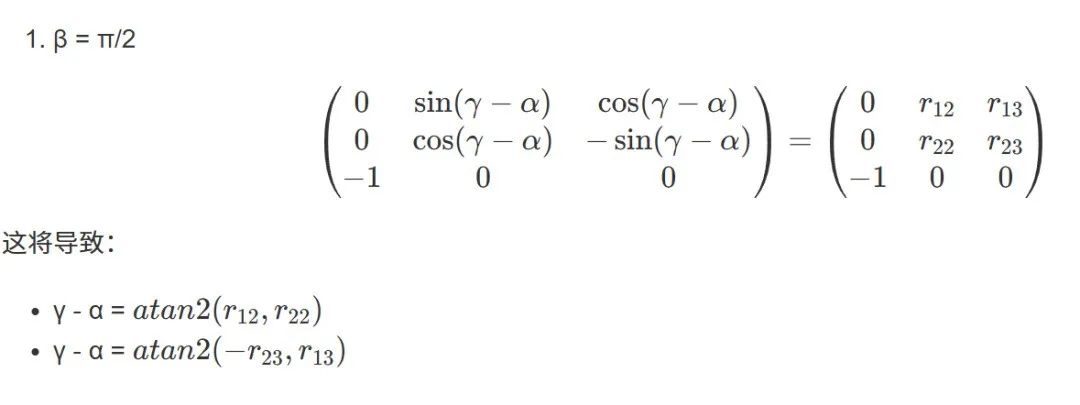
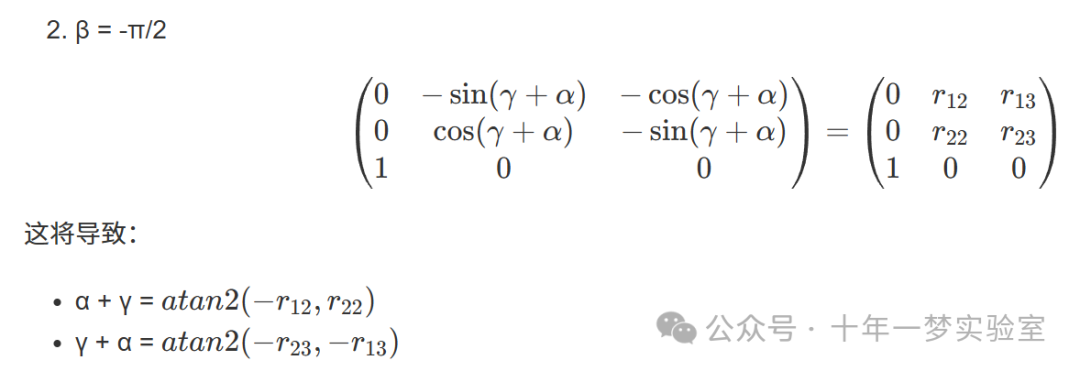
这意味着对于给定的旋转矩阵,在 β = ±π/2 时,有无限多组(滚动,偏航)角度。
访问链接:[link](https://compsci290-s2016.github.io/CoursePage/Materials/EulerAnglesViz/) ,查看交互式万向节可视化内容。
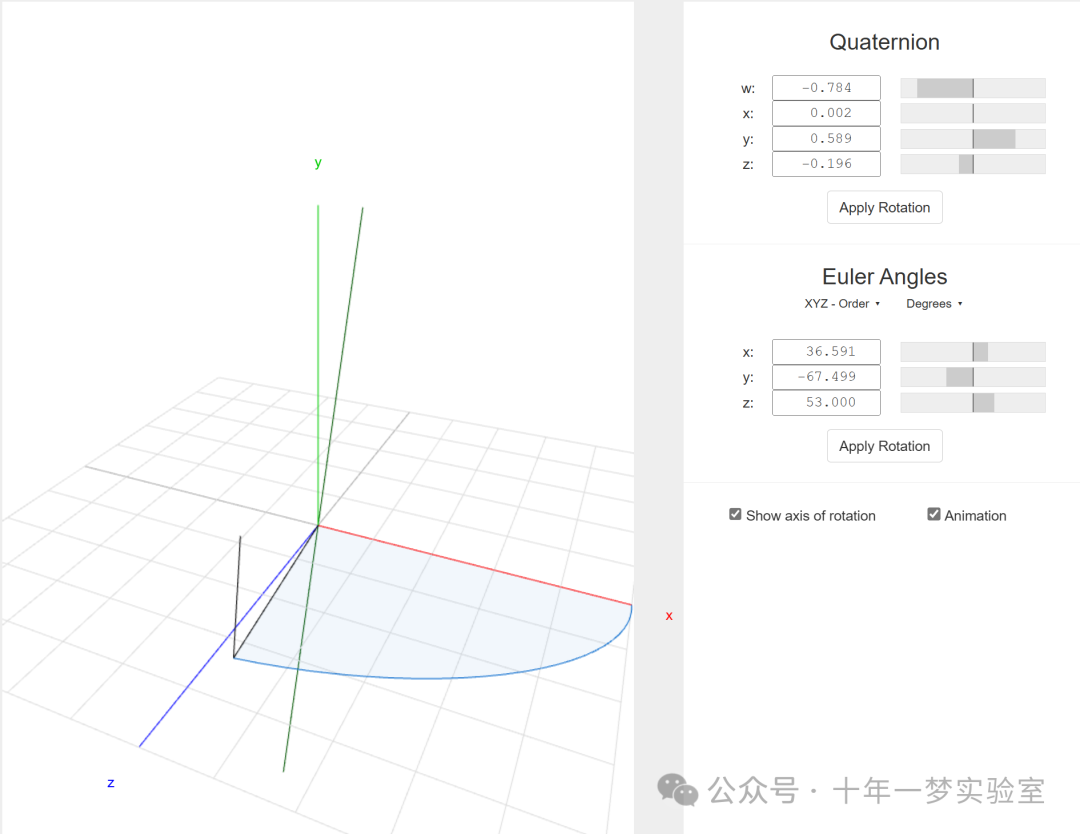
当然,让我们使用一个数值例子来说明万向节锁问题,然后解释该问题如何在欧拉角表示中表现出来,而不是四元数。
数值示例:
考虑一个我们希望使用滚-俯仰-偏航序列(通常在航空中使用)旋转的3D对象。为了简单起见,我们使用度数:
初始方向:未应用旋转。欧拉角为(滚动,俯仰,偏航)=(0°,0°,0°)。
旋转:我们应用+90°的俯仰。现在,我们的欧拉角为(0°,90°,0°)。
此时,对象的“鼻子”指向正上方。问题是:
如果我们现在尝试应用一个例如+45°的滚动,实际在3D空间中的效果将与应用+45°的偏航相同。我们无法区分滚动和偏航;它们已经退化。这就是万向节锁。
数值值:
欧拉角:
在+90°俯仰之后,我们的欧拉角变为:
滚动:0°(或+45°如果在俯仰后尝试滚动)
俯仰:90°
偏航:0°(或+45°如果在俯仰后尝试偏航)
这是有问题的,因为在+90°俯仰之后,滚动和偏航旋转在效果上是无法区分的。
四元数表示:
围绕Y轴的+90°俯仰旋转可以表示为:

现在,如果我们想在这个俯仰之后应用+45°的滚动,使用四元数,我们将上述四元数乘以围绕X轴的+45°滚动的四元数表示,结果是一个独特且唯一的四元数值,平滑地结合了这两个旋转而没有歧义。
为什么欧拉角有这个问题:
欧拉角的万向节锁问题的核心在于旋转的顺序性。当俯仰角为±90°时,滚动和偏航轴变得对齐。因此,围绕其中一个轴旋转与围绕另一个轴旋转是无法区分的。这种重叠或“锁定”导致了自由度的丧失。
为什么四元数没有这个问题:
四元数表示旋转为一个单一的、统一的操作,而不是一个序列。这意味着没有固有的顺序或序列需要担心。+90°俯仰旋转后的四元数旋转加上+45°滚动将产生一个独特的方向,与任何其他旋转组合不同。
此外,四元数在方向之间平滑插值(使用“球面线性插值”),确保连续的旋转而没有欧拉角相关的跳跃或奇点。
总之,四元数的非顺序性质,加上它们独特地表示每个可能方向的能力,使得它们避免了困扰欧拉角的万向节锁问题。
点击此处查看互动演示:
https://quaternions.online/
1.10. 3D旋转矩阵的唯一性
参考文献:matrices - $3D$ rotation matrix uniqueness - Mathematics Stack Exchange https://math.stackexchange.com/questions/105264/3d-rotation-matrix-uniqueness/105380#105380
2. 全局参考和局部切平面坐标
在选择移动和固定轴时,有几种轴约定,这些约定决定了角度的符号。
Tait-Bryan角通常用于描述车辆相对于选定参考系的姿态。车辆中的正x轴总是指向运动方向。对于正y轴和z轴,我们必须面对两种不同的约定:
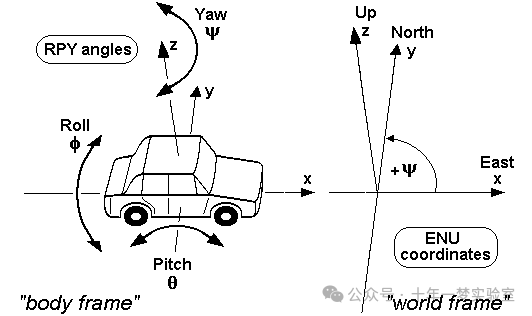
2.1 东、北、上(ENU) East, North, Up
东、北、上(ENU),用于地理学(z轴向上,x轴在运动方向,y轴指向左)
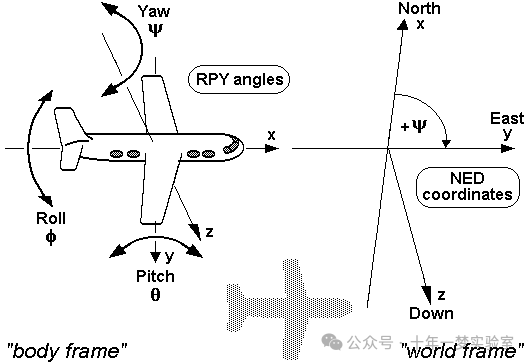
2.2 北、东、下(NED)North, East, Down
北、东、下(NED),特别用于航空航天(z轴向下,x轴在运动方向,y轴指向右)
对于像汽车、坦克这样的陆地车辆,ENU系统(东-北-上)作为外部参考(世界坐标系),车辆(车体)的正y轴或俯仰轴总是指向其左侧,正z轴或偏航轴总是指向上。
对于像潜艇、船只、飞机等的空中和海上车辆,使用NED系统(北-东-下)作为外部参考(世界坐标系),车辆(车体)的正y轴或俯仰轴总是指向其右侧,正z轴或偏航轴总是指向下。
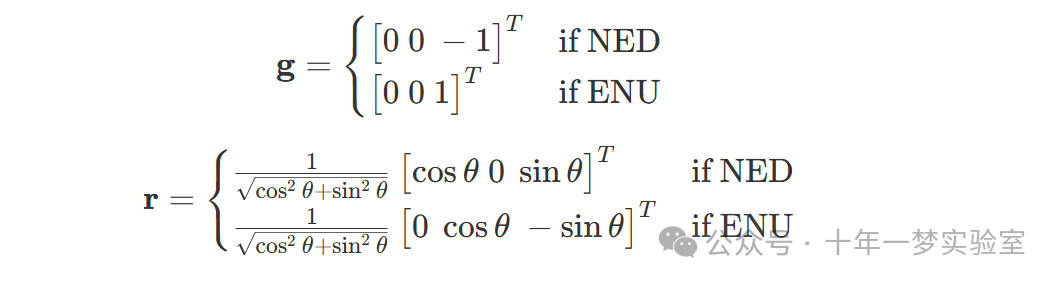
数学公式:
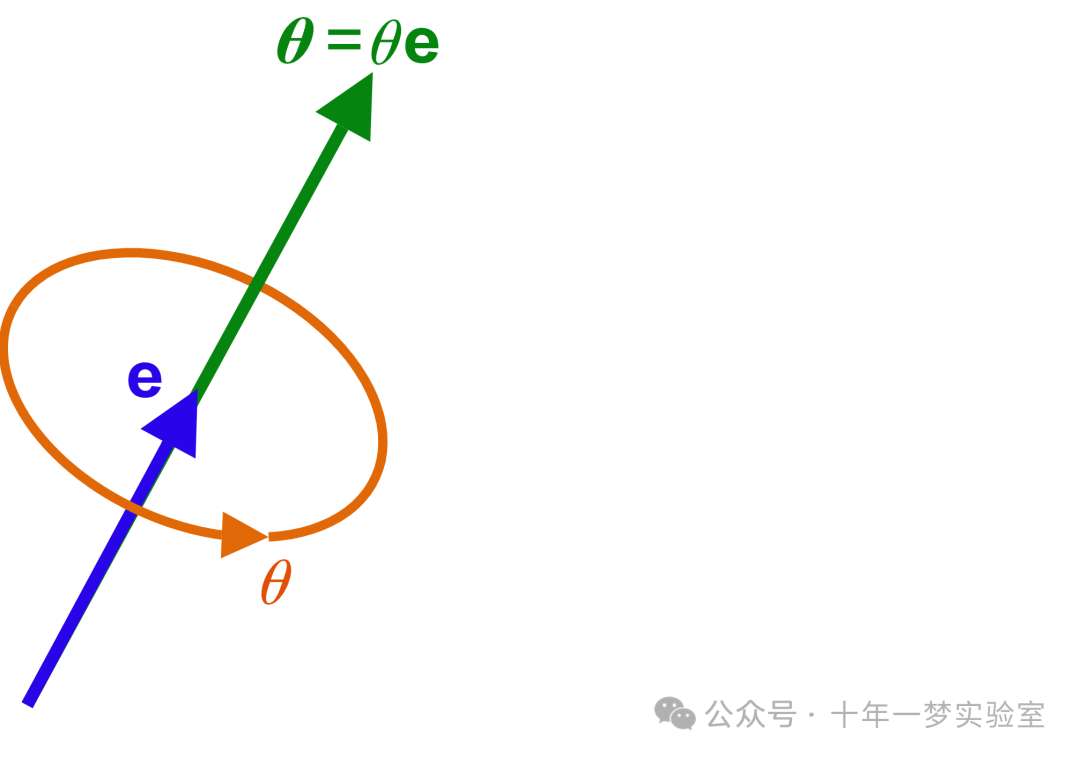
3. 轴角表示
轴角表示在三维欧几里得空间中的旋转由两个量表示:
一个单位向量 e 表示旋转轴的方向,
一个角度 θ
示例:

上述例子可以表示为:
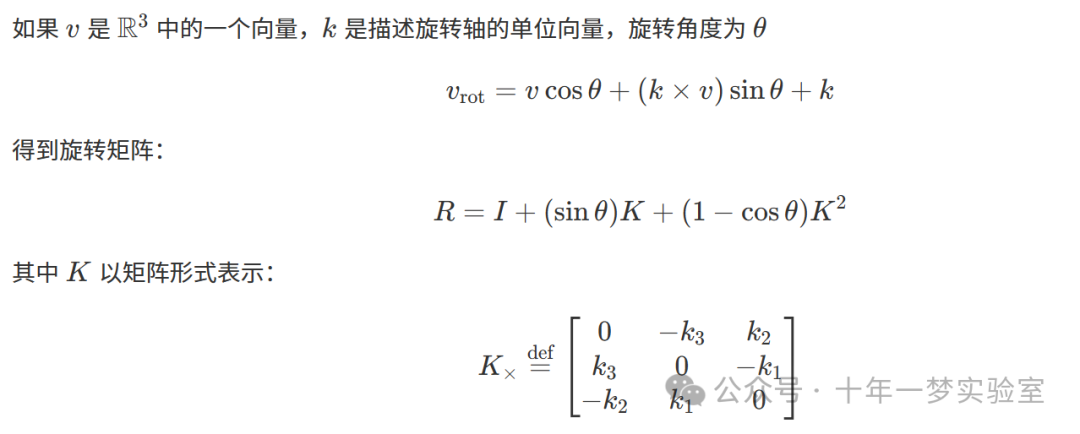
罗德里格斯旋转公式
旋转的指数坐标
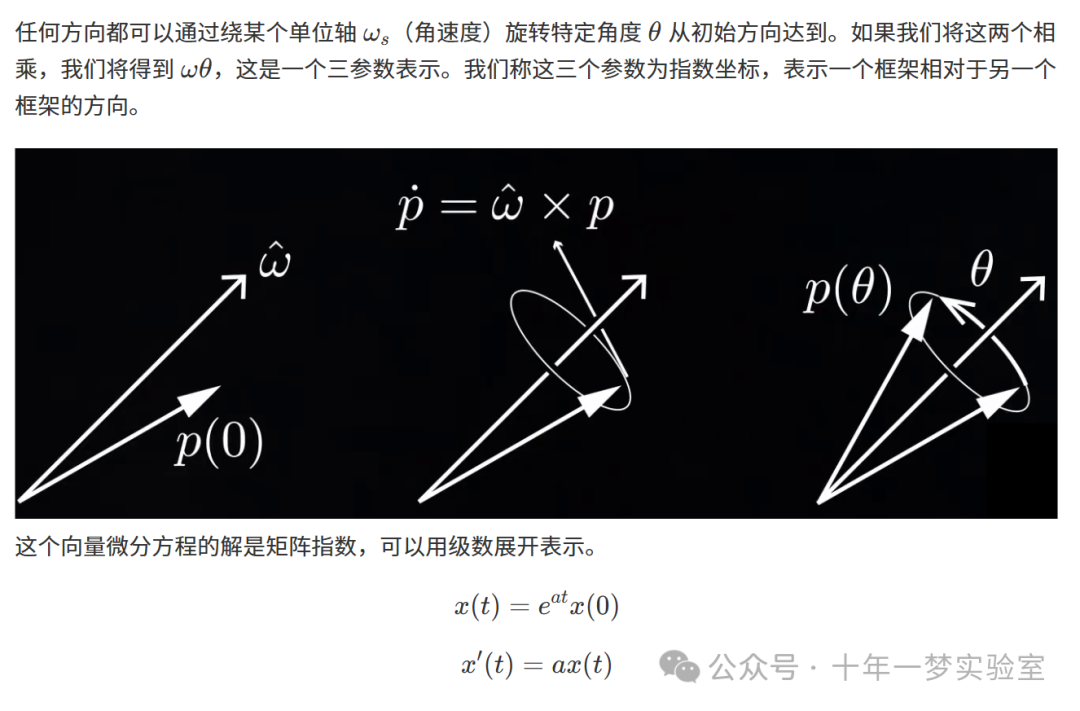
泰勒级数
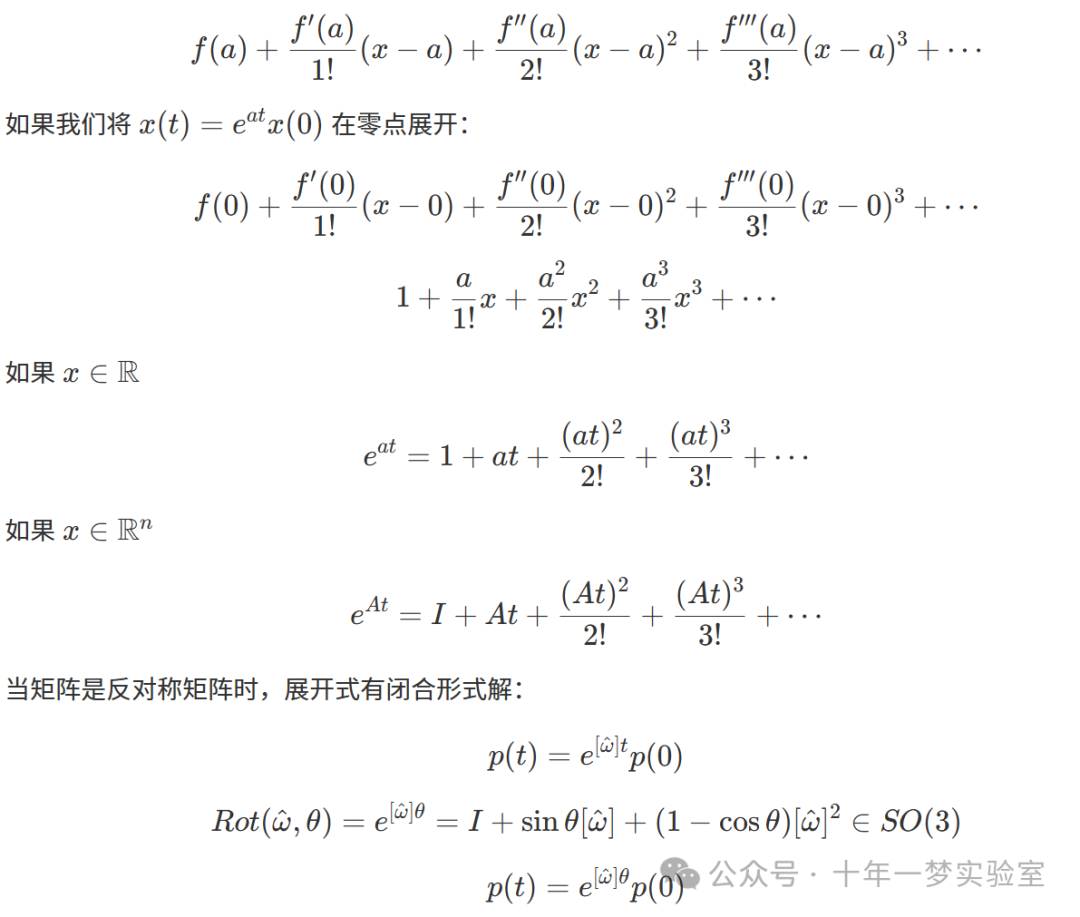
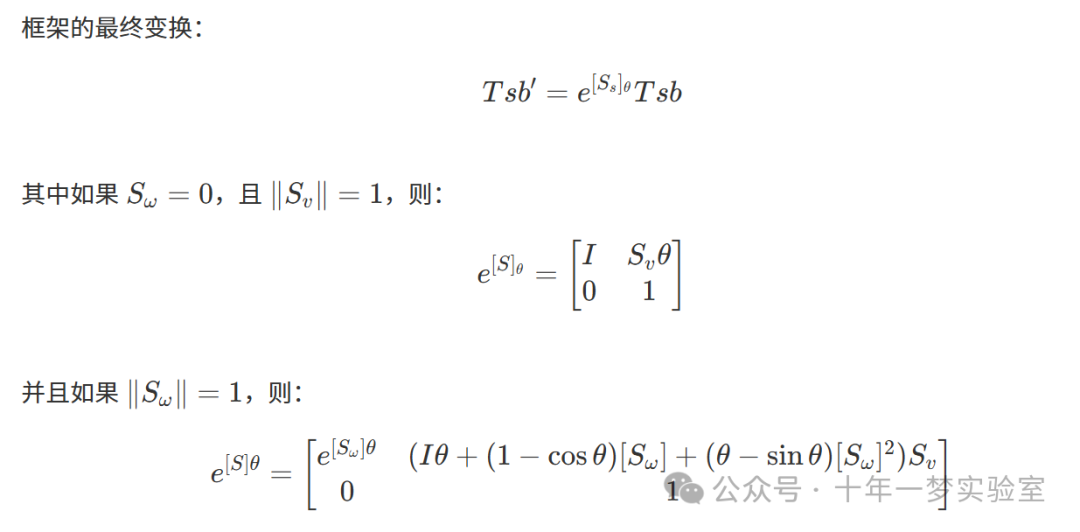
刚体运动的指数坐标
4. 四元数
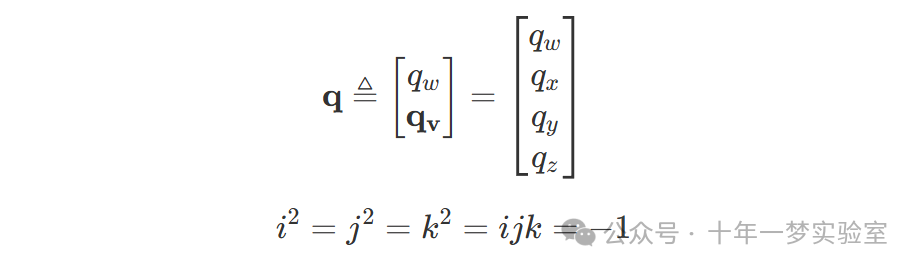
四元数数系扩展了由威廉·罗恩·哈密顿引入的复数。哈密顿将四元数定义为两个向量(在三维空间中的两条线)的商。四元数通常表示为以下形式:

其中 a, b, c 和 d 是实数;i, j 和 k 是基本四元数(可以解释为沿三个空间轴指向的单位向量的符号)。

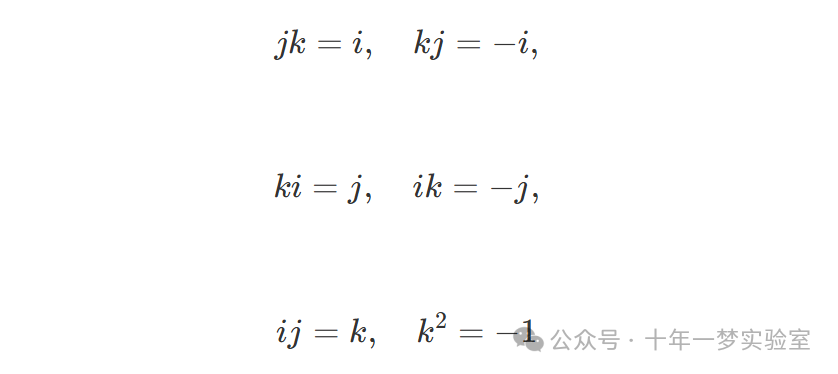
4.1. 基础
四元数集合通过分量加法构成了实数上的四维向量空间,基为 {1,i,j,k}
,其乘法规则为:
四元数的向量定义:
4.1.1. 四元数惯例:哈密顿和JPL
参考文献:1
(https://fzheng.me/2017/11/12/quaternion_conventions_en/)
4.2. 四元数的逆
共轭
四元数的共轭是将虚部取相反数:

如果四元数与其共轭相乘,我们得到一个实数。实部是其长度的平方:

长度
四元数的长度定义为

可以验证,乘积的长度是长度的乘积。

四元数的逆为:

4.3. 四元数乘法(哈密顿积)

4.4 作为方向表示的四元数
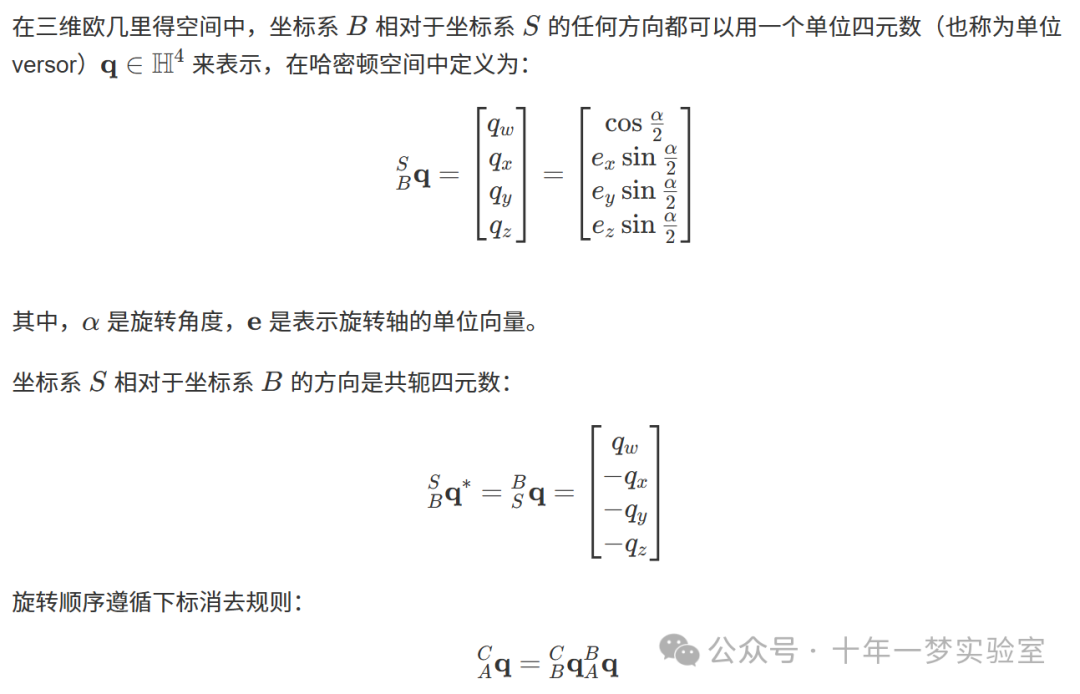
4.5 用单位四元数变换参考坐标系
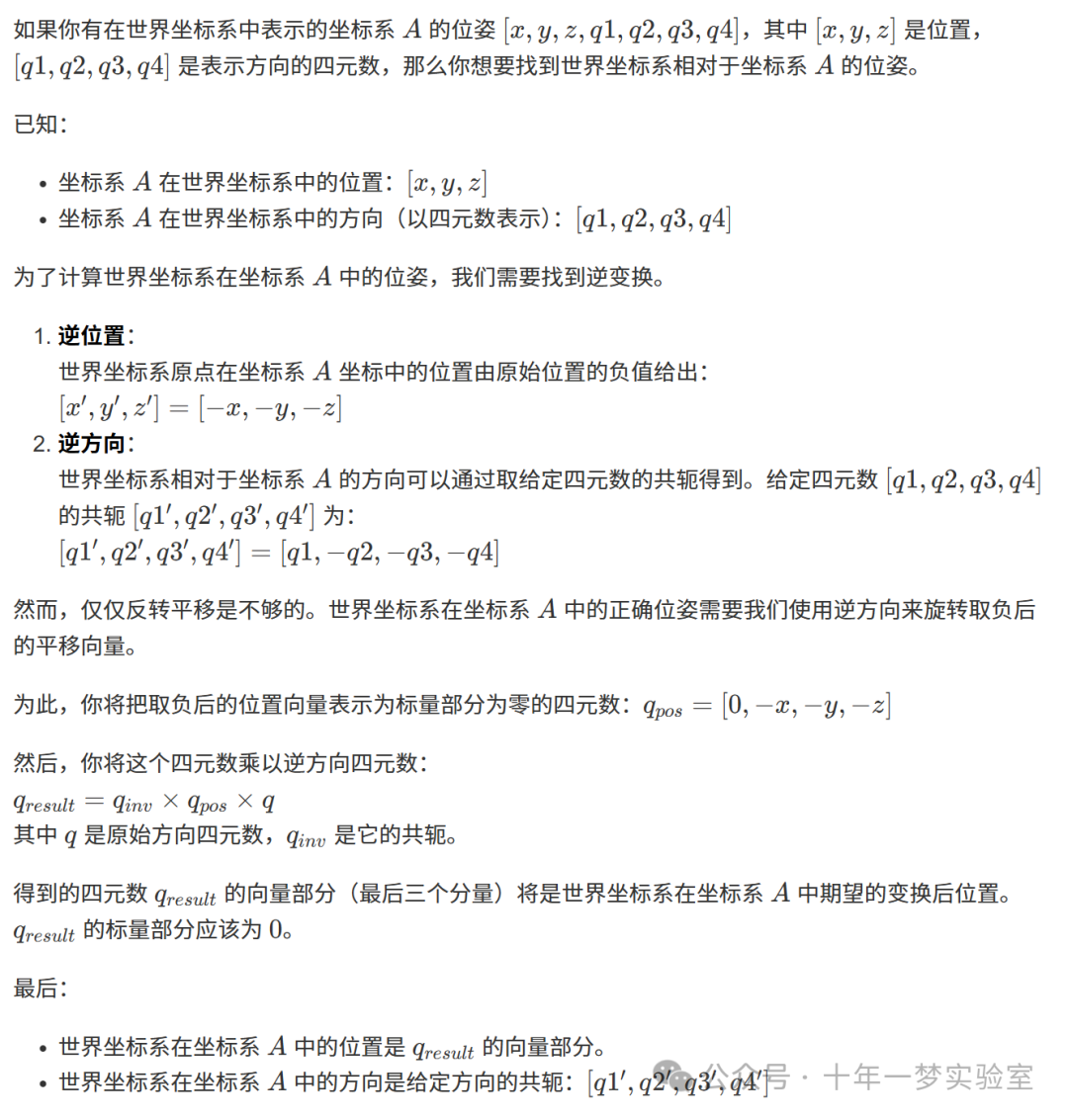
4.6 四元数逆位姿
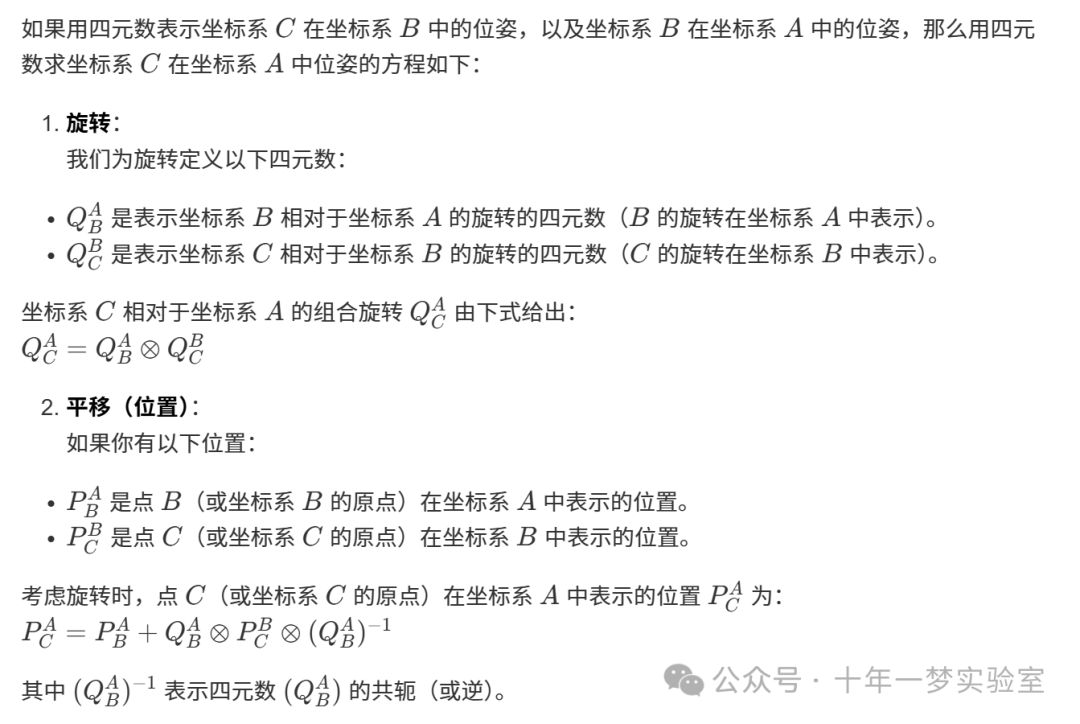
4.7 四元数相对位姿
4.8 四元数与欧拉角之间的转换
有一篇关于四元数的非常不错的文章可供阅读。
https://danceswithcode.net/engineeringnotes/quaternions/quaternions.html
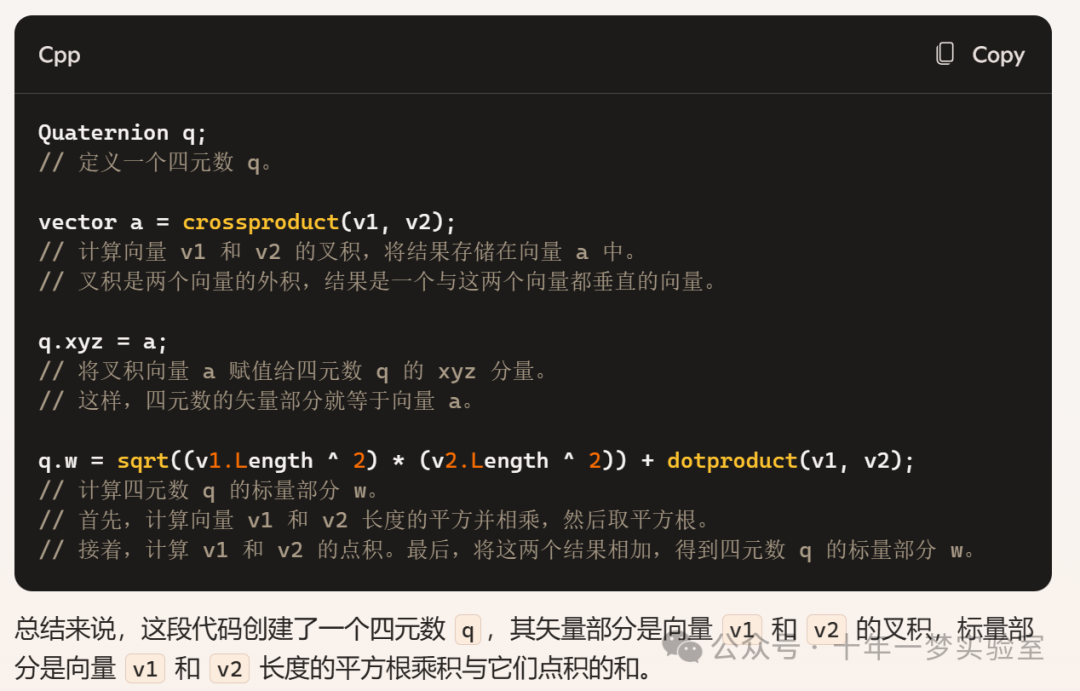
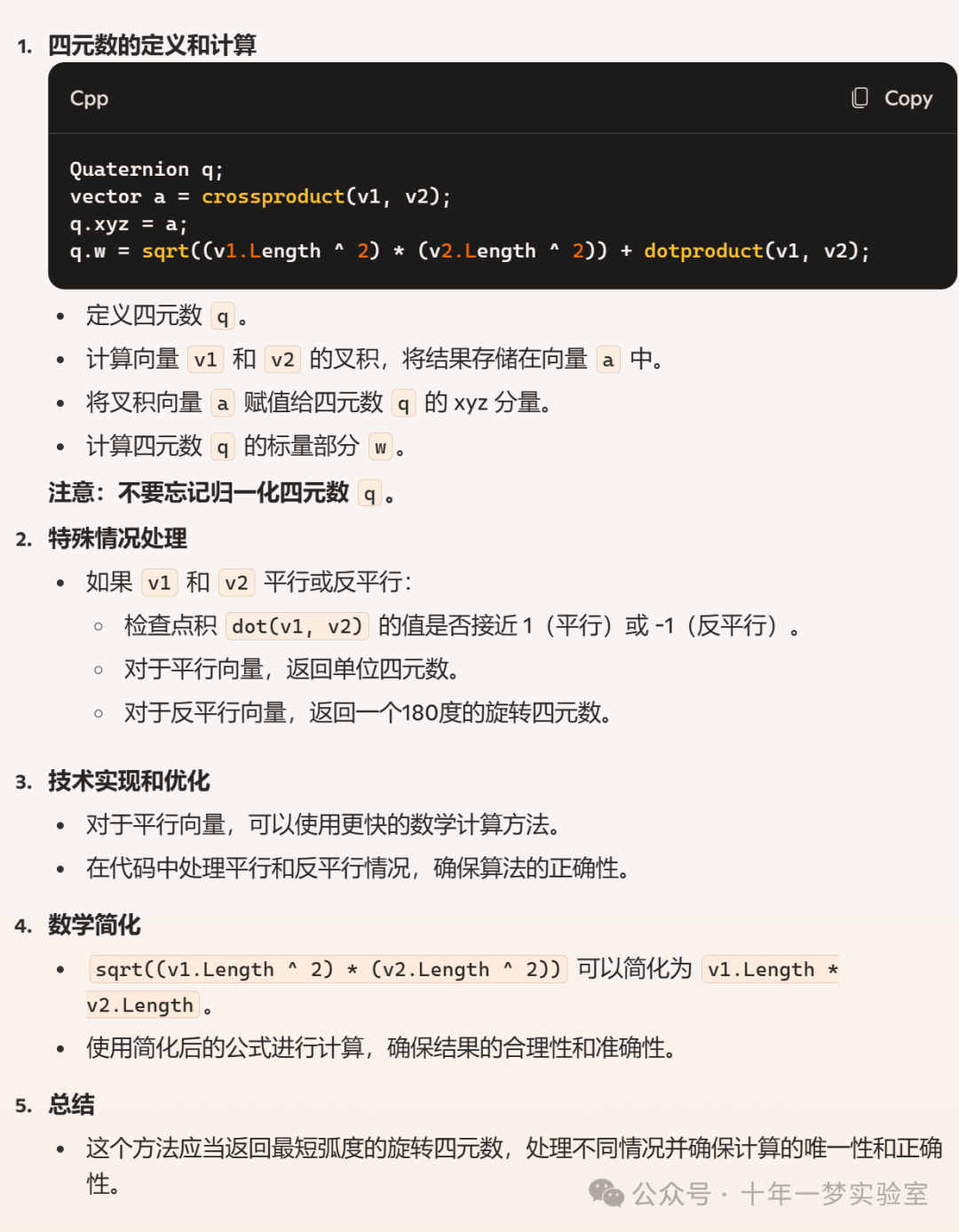
4.9 表示从一个向量到另一个向量旋转的四元数
参考文献:math - Finding quaternion representing the rotation from one vector to another - Stack Overflow https://stackoverflow.com/questions/1171849/finding-quaternion-representing-the-rotation-from-one-vector-to-another
4.10 四元数与轴 - 角表示
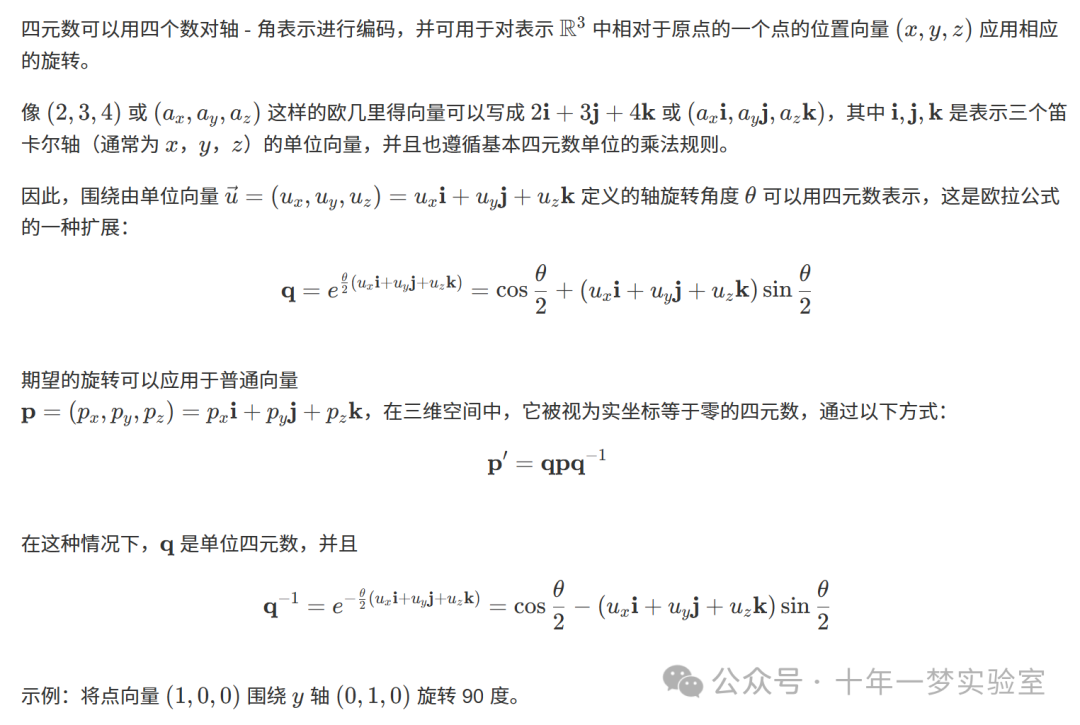
// P = [0, p1, p2, p3] <-- 点向量 P = [0, p1, p2, p3]
// alpha = 旋转角度
// [x, y, z] = 旋转轴(单位向量)
// R = [cos(alpha/2), sin(alpha/2)*x, sin(alpha/2)*y, sin(alpha/2)*z] <-- 旋转
// R' = [w, -x, -y, -z]
// P' = RPR'
// P' = H(H(R, P), R')
Eigen::Vector3d p(1,0,0);// 定义向量 p,初始值为 (1, 0, 0)
Quaternion P;// 定义四元数 P
P.w =0;// 四元数 P 的实部为 0
P.x =p(0);// 四元数 P 的 x 分量为向量 p 的第一个分量
P.y =p(1);// 四元数 P 的 y 分量为向量 p 的第二个分量
P.z =p(2);// 四元数 P 的 z 分量为向量 p 的第三个分量
// 旋转 90 度绕 y 轴
double alpha = M_PI /2;// 定义旋转角度 alpha 为 π/2(即 90 度)
Quaternion R;// 定义四元数 R
Eigen::Vector3d r(0,1,0);// 定义旋转轴向量 r,为 (0, 1, 0)
r = r.normalized();// 将旋转轴向量标准化
R.w =cos(alpha /2);// 四元数 R 的实部为 cos(alpha/2)
R.x =sin(alpha /2)*r(0);// 四元数 R 的 x 分量为 sin(alpha/2) * r 的第一个分量
R.y =sin(alpha /2)*r(1);// 四元数 R 的 y 分量为 sin(alpha/2) * r 的第二个分量
R.z =sin(alpha /2)*r(2);// 四元数 R 的 z 分量为 sin(alpha/2) * r 的第三个分量
std::cout << R.w <<","<< R.x <<","<< R.y <<","<< R.z << std::endl;// 输出四元数 R 的各分量
Quaternion R_prime =quaternionInversion(R);// 计算四元数 R 的共轭四元数 R'
Quaternion P_prime =quaternionMultiplication(quaternionMultiplication(R, P), R_prime);// 计算 P' = RPR'
// 旋转 90 度绕 y 轴后的点 (1, 0, 0),结果是 (0, 0, -1)。
// 请注意,P' 的第一个元素总是 0,因此可以忽略。参考: 1 rotations - How do you rotate a vector by a unit quaternion? - Mathematics Stack Exchange https://math.stackexchange.com/questions/40164/how-do-you-rotate-a-vector-by-a-unit-quaternion
4.11 用四元数完整表示一个坐标系
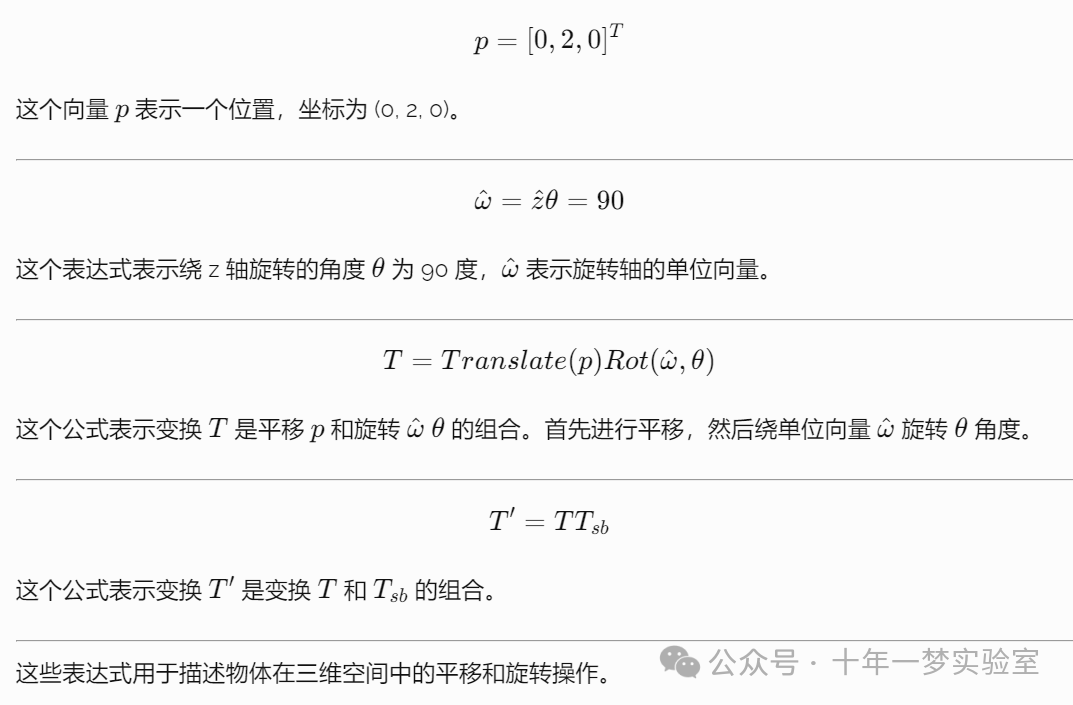
为了在三维空间中表示一个位置,使用表示方向的四元数和表示位置的向量的组合。
对于位置,可以使用
Vector3d,它是一个由三个双精度数组成的向量。对于方向,使用
Quaterniond,它是一个使用双精度的四元数。
定义位置和方向
Eigen::Vector3d position(1.0, 2.0, 3.0); // 示例位置 (x, y, z)
Eigen::Quaterniond orientation; // 用于方向的四元数初始化四元数
可以通过几种方式初始化四元数,例如从轴 - 角表示、从旋转矩阵或直接设置其分量。
// 示例:从轴和角度初始化四元数
Eigen::Vector3d axis(0, 1, 0); // 围绕 y 轴旋转
double angle = M_PI / 4; // 45 度
orientation = Eigen::AngleAxisd(angle, axis.normalized());使用位置和方向
一旦有了位置和四元数,就可以用它们来变换点、计算旋转等。
// 示例:使用四元数旋转一个点
Eigen::Vector3d point(1, 0, 0);
Eigen::Vector3d rotatedPoint = orientation * point;组合位置和方向
如果你想创建一个同时包含位置和方向的变换矩阵,可以使用仿射变换。
Eigen::Affine3d transform = Eigen::Translation3d(position) * orientation;4.12 用四元数表示的坐标系的乘法
下面是一个完整的综合示例:
double x1 =1.0, y1 =0.0, z1 =0.0;
// 定义变量 x1, y1, z1 表示第一个位置的坐标
double q_w1 =1.0, q_x1 =0.0, q_y1 =0.0, q_z1 =0.0;
// 定义四元数 q_w1, q_x1, q_y1, q_z1 表示第一个姿态的四元数
double x2 =1.0, y2 =0.0, z2 =0.0;
// 定义变量 x2, y2, z2 表示第二个位置的坐标
double q_w2 =1.0, q_x2 =0.0, q_y2 =0.0, q_z2 =0.0;
// 定义四元数 q_w2, q_x2, q_y2, q_z2 表示第二个姿态的四元数
Eigen::Affine3d pose1 =Eigen::Translation3d(x1, y1, z1)*Eigen::Quaterniond(q_w1, q_x1, q_y1, q_z1);
// 创建第一个变换矩阵 pose1,结合了位移和四元数表示的旋转
Eigen::Affine3d pose2 =Eigen::Translation3d(x2, y2, z2)*Eigen::Quaterniond(q_w2, q_x2, q_y2, q_z2);
// 创建第二个变换矩阵 pose2,结合了位移和四元数表示的旋转
Eigen::Affine3d result = pose1 * pose2;
// 计算 pose1 和 pose2 的复合变换,并将结果存储在 result 中
Eigen::Vector3d res_translation = result.translation();
// 提取 result 变换中的平移部分
Eigen::Quaterniond res_quaternion(result.rotation());
// 提取 result 变换中的旋转部分,并将其表示为四元数
std::cout <<"Resulting Pose Translation: "<< res_translation.transpose()<< std::endl;
// 输出复合变换的平移部分
std::cout <<"Resulting Pose Quaternion: "
<< res_quaternion.w()<<" "
<< res_quaternion.x()<<" "
<< res_quaternion.y()<<" "
<< res_quaternion.z()<< std::endl;
// 输出复合变换的四元数部分这段代码先定义了两个位置和对应的姿态四元数,然后创建结合了位移和平移的变换矩阵 pose1 和 pose2,计算它们的复合变换,并提取平移和旋转部分,最后输出复合变换的平移和四元数表示。
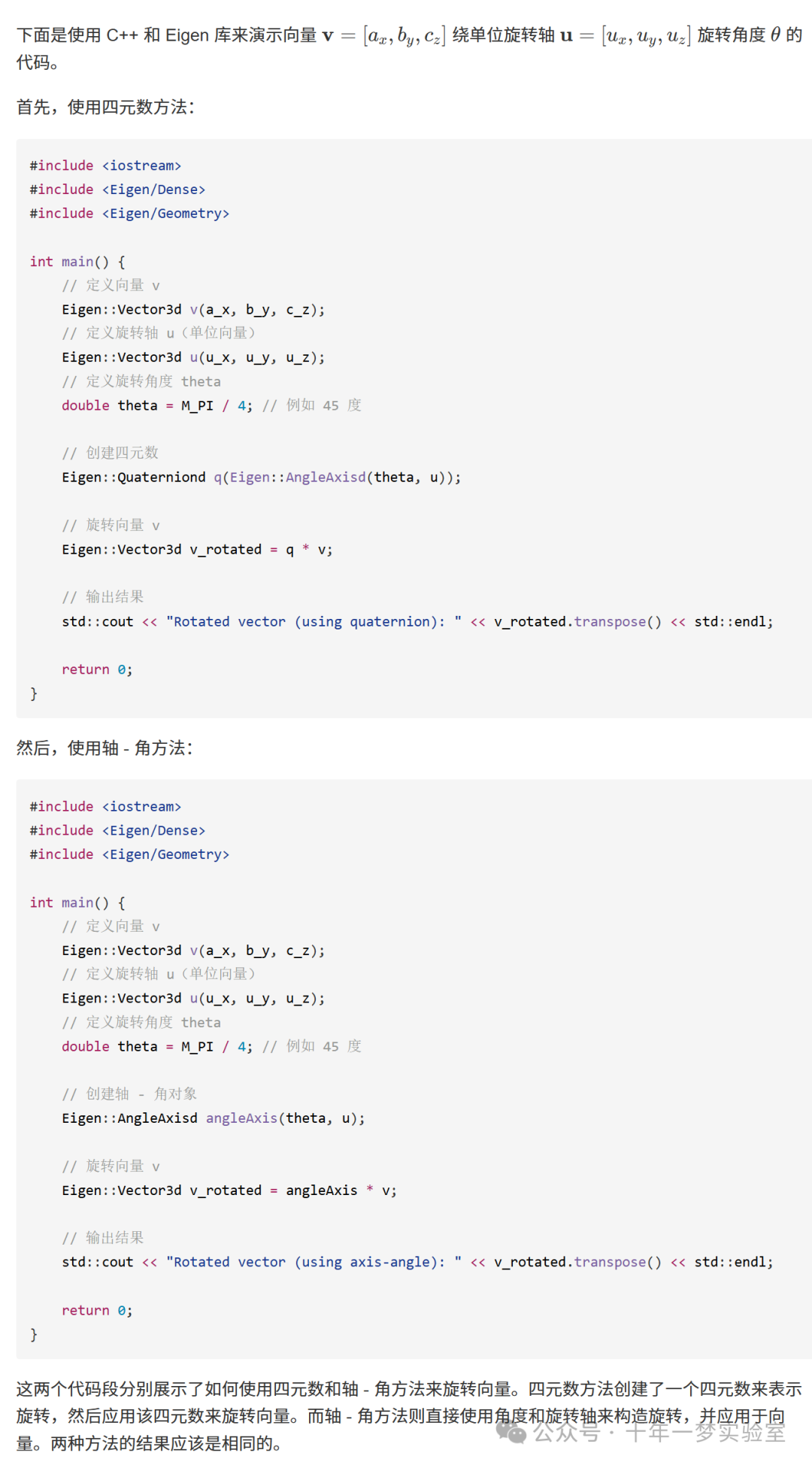
使用四元数进行旋转:
使用轴 - 角进行旋转:

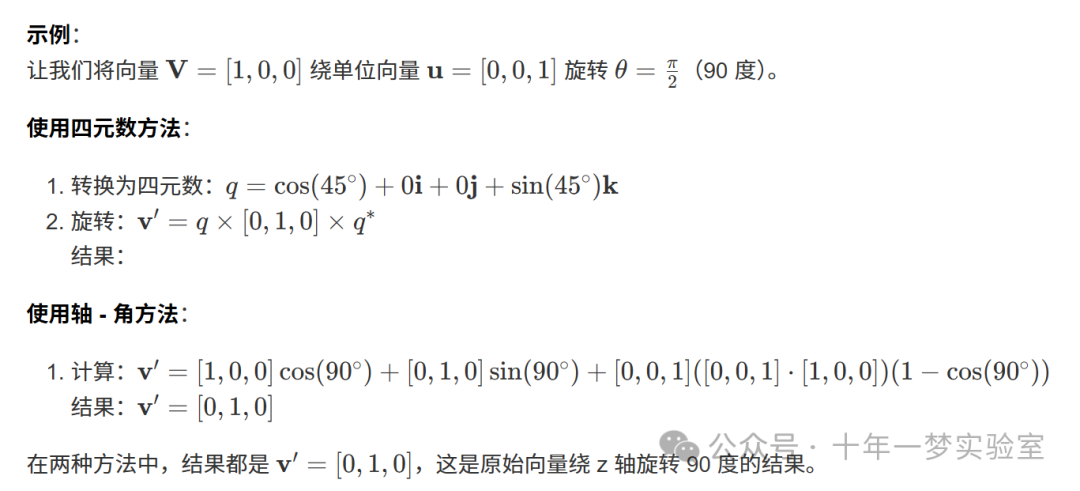
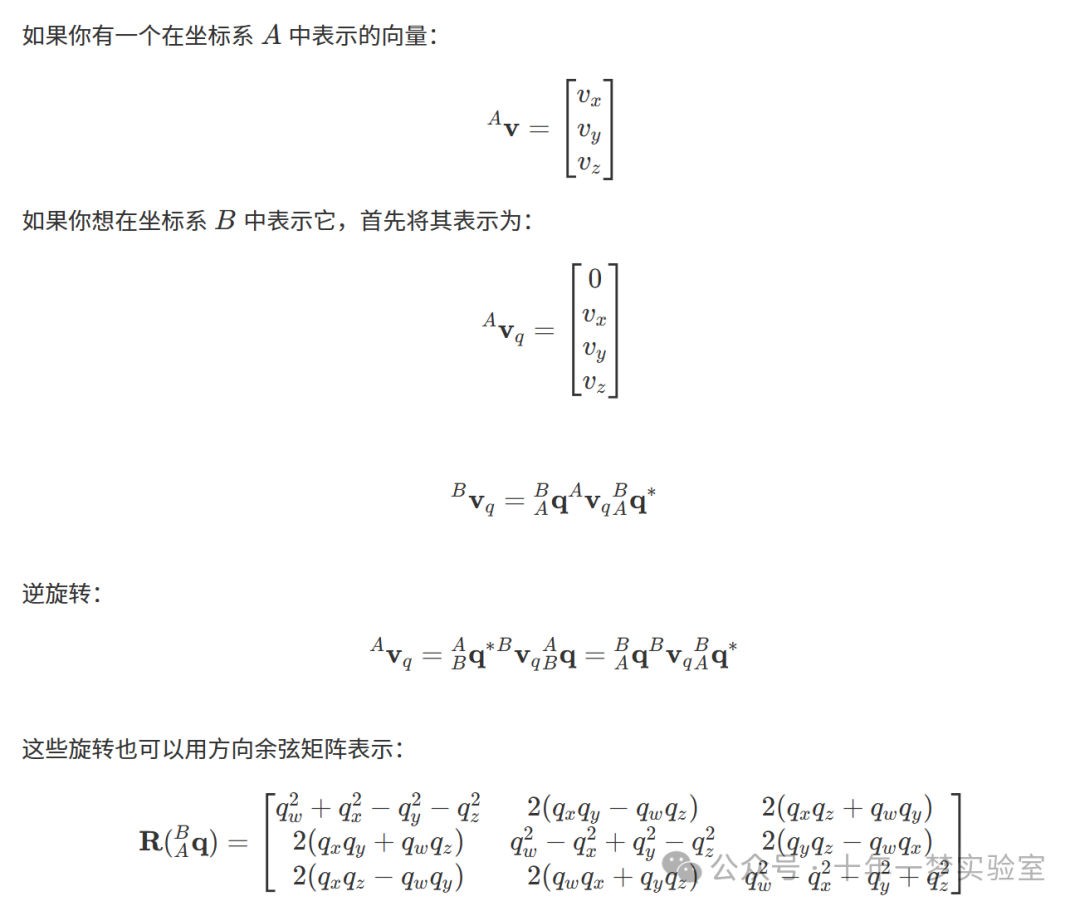
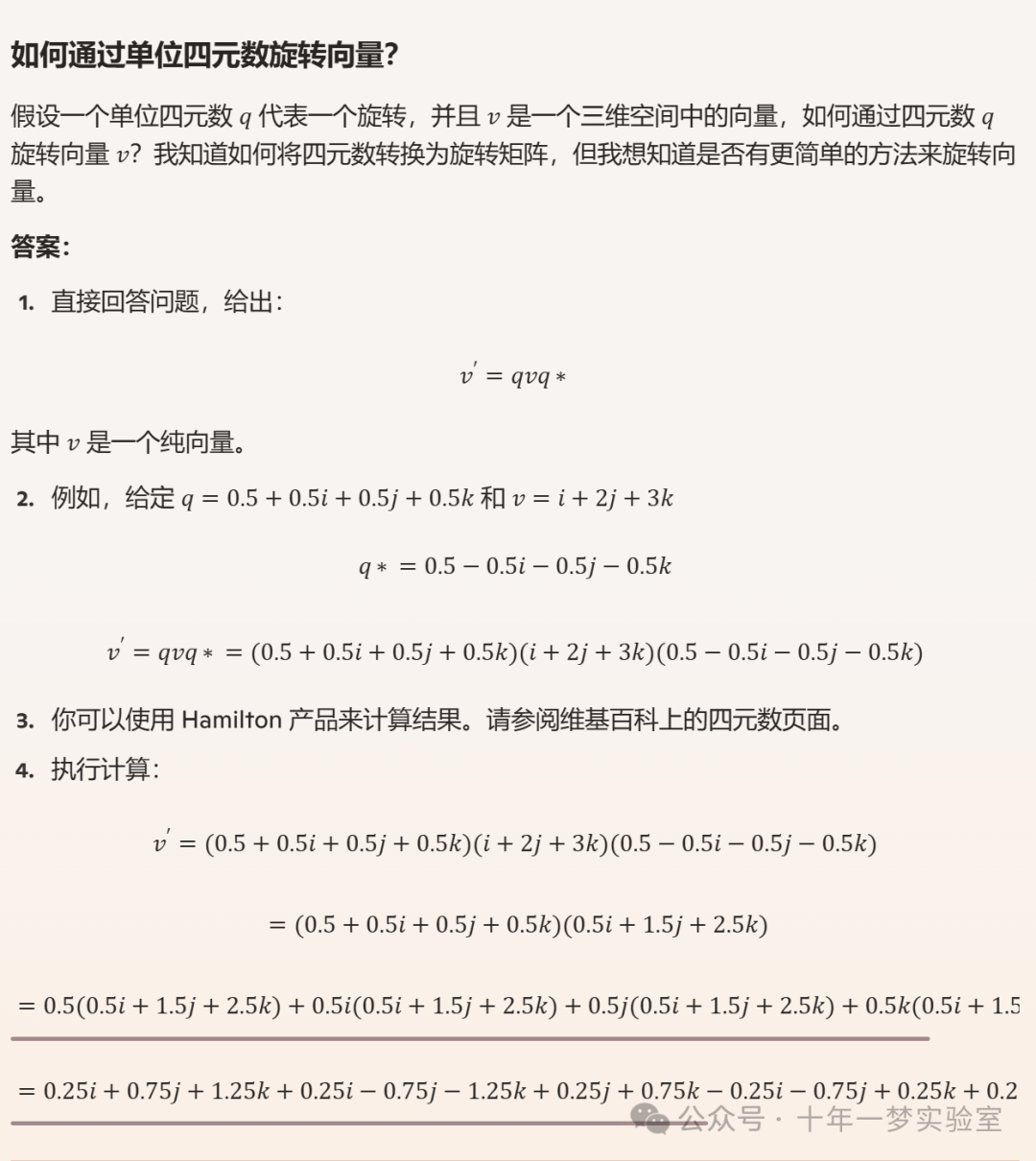
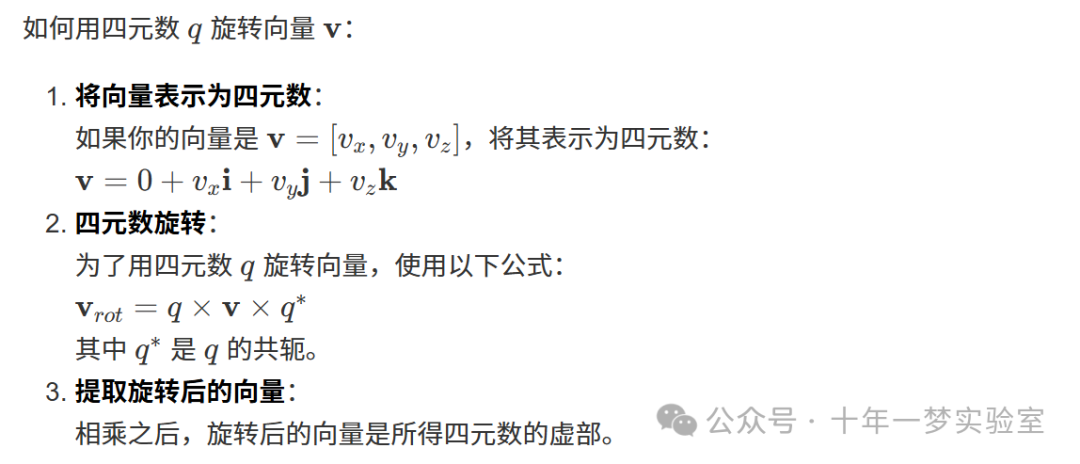
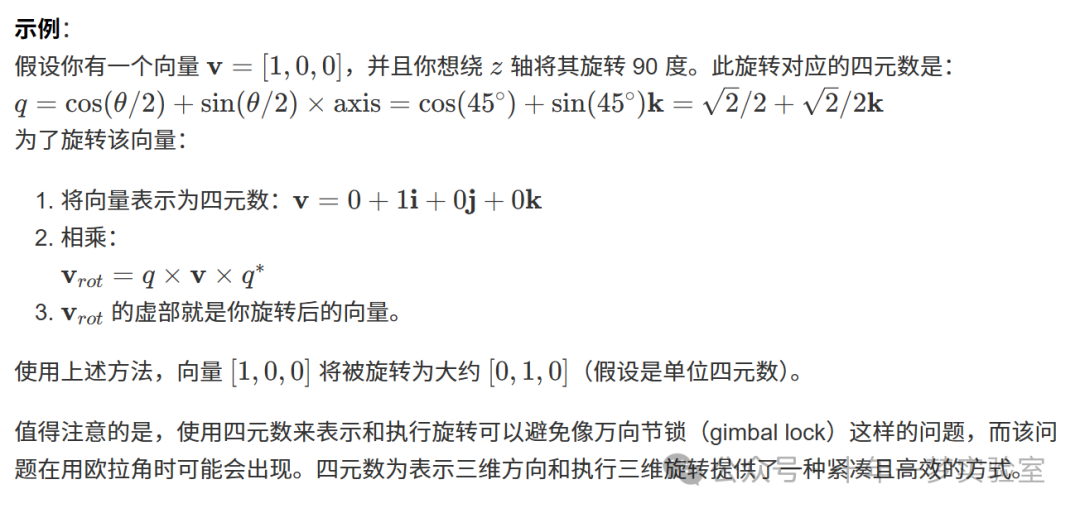
4.12.1 使用四元数旋转向量
4.12.2 用四元数变换位置的完整表示(方向和位移)
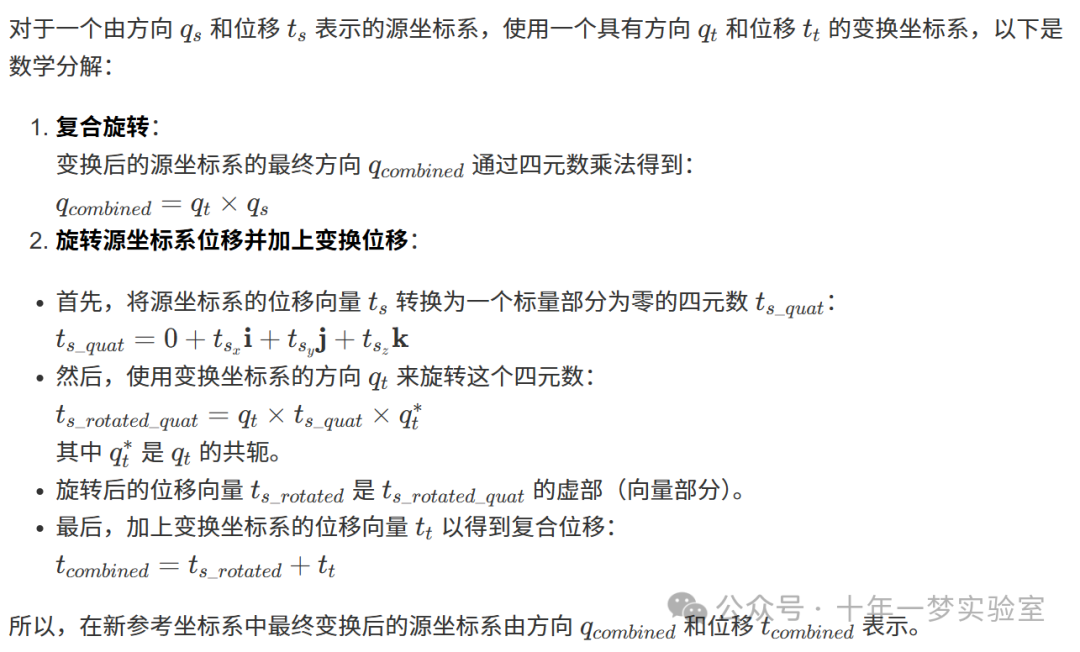
当你拥有一个同时包含方向(旋转)和位移的位置完整表示,并且想要使用四元数对其进行变换时,你需要同时考虑旋转和位移分量。
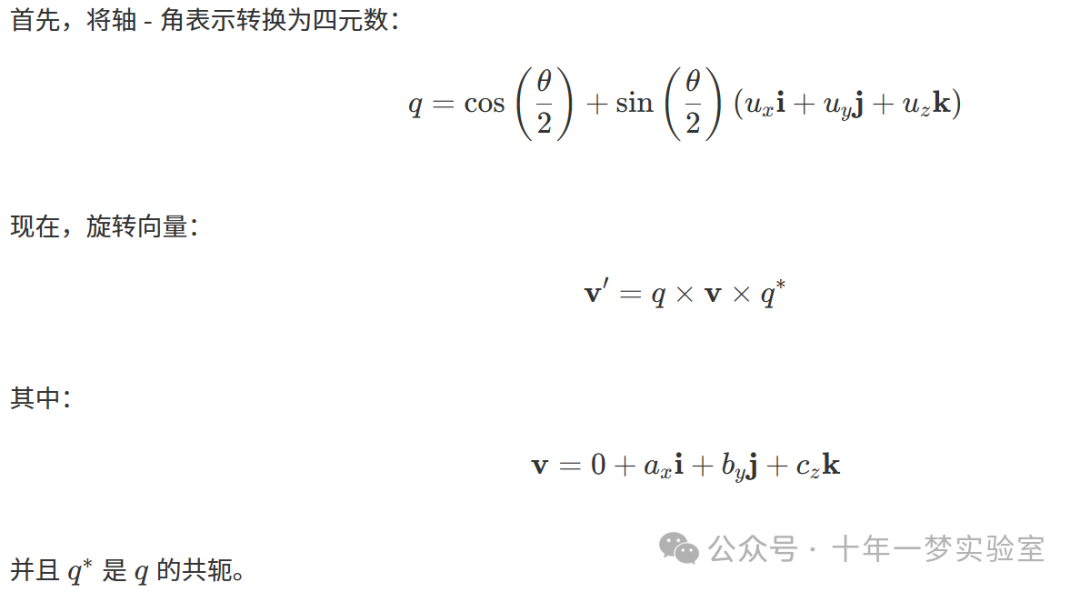
我们进行如下表示:
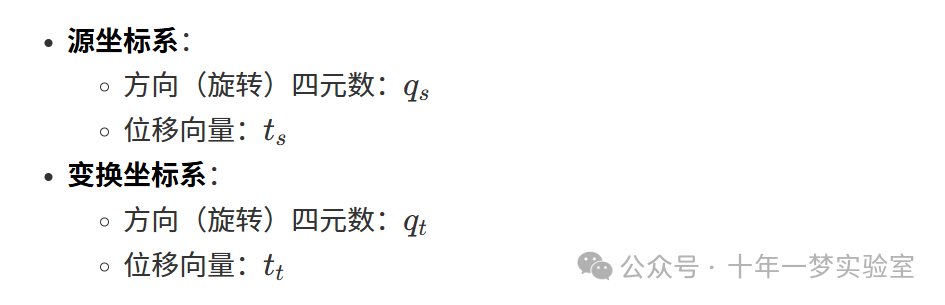
为了用变换坐标系对源坐标系进行变换:
使用变换坐标系的方向来旋转源坐标系的方向。
用变换坐标系的方向来旋转源坐标系的位移,然后加上变换坐标系的位移。
以下是一个使用 numpy 和 numpy - quaternion 库的 Python 代码示例:
import numpy as np
import quaternion
# 定义四元数和位移
# 为了示例的目的,假设如下:
# 对于两个坐标系,分别绕 z 轴旋转 45 度
# 并且平移 (1,0,0)
angle = np.pi /4
# 定义旋转角度为 45 度 (π/4)
axis = np.array([0,0,1])
# 定义旋转轴为 z 轴
q_s = quaternion.from_rotation_vector(angle * axis)
# 将旋转角度和轴转换为四元数 q_s 表示源坐标系的旋转
t_s = np.array([1,0,0])
# 定义源坐标系的平移向量 t_s
q_t = quaternion.from_rotation_vector(angle * axis)
# 将旋转角度和轴转换为四元数 q_t 表示目标坐标系的旋转
t_t = np.array([1,0,0])
# 定义目标坐标系的平移向量 t_t
# 1. 复合旋转
q_combined = q_t * q_s
# 计算两个旋转的复合四元数 q_combined
# 2. 旋转源坐标系的平移向量,然后进行平移
# 将平移向量转换为四元数形式
t_s_quat = np.quaternion(0, t_s[0], t_s[1], t_s[2])
# 旋转平移向量
t_s_rotated_quat = q_t * t_s_quat * q_t.inverse()
# 提取旋转后的向量部分并加上目标坐标系的平移
t_combined = np.array([t_s_rotated_quat.x, t_s_rotated_quat.y, t_s_rotated_quat.z])+ t_t
print(f"Combined Orientation (Quaternion): {q_combined}")
# 输出复合旋转的四元数表示
print(f"Combined Translation: {t_combined}")
# 输出复合平移向量这段代码首先定义了两个四元数和对应的位移向量,然后计算两个旋转的复合四元数,并旋转源坐标系的平移向量,再将结果加上目标坐标系的平移,最后输出复合的旋转(四元数表示)和平移向量。
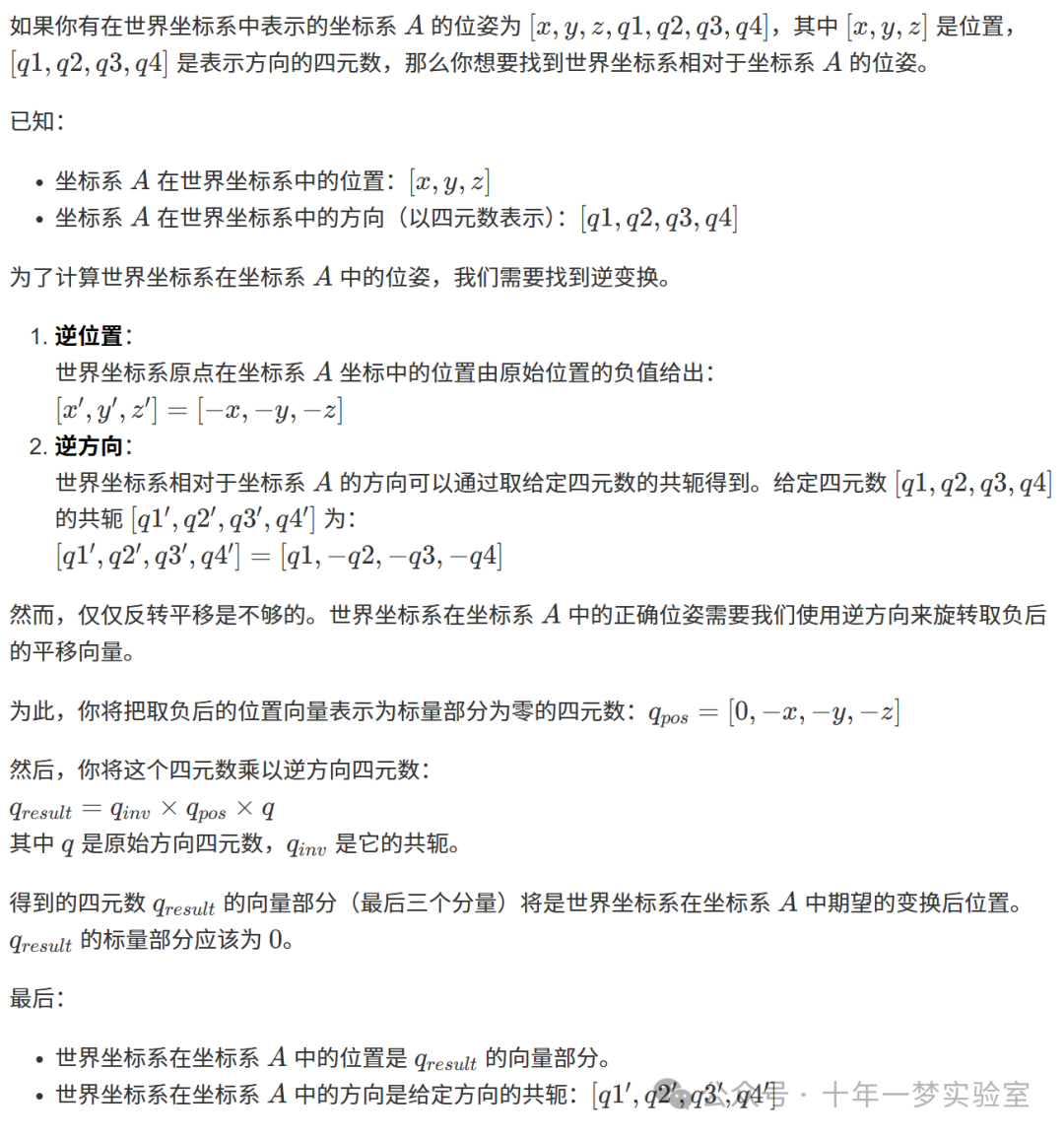
4.12.3 用四元数表示的完整位姿(位置和方向)的逆
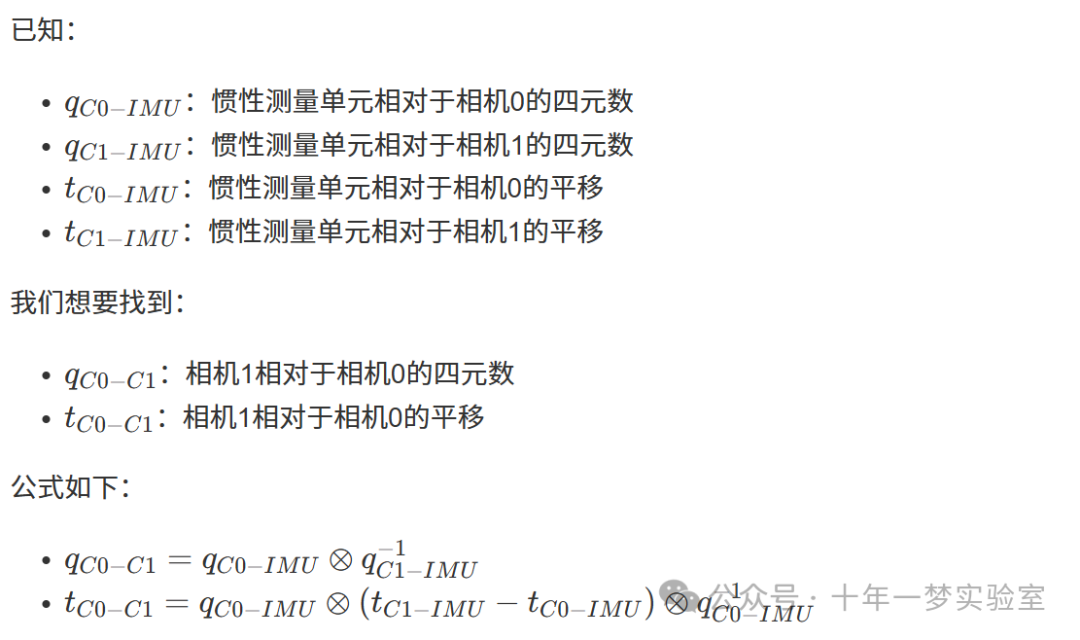
4.12.4 两个相机与惯性测量单元(IMU)相对位姿示例
如果给定的变换是惯性测量单元在相机坐标系中的位置,那么我们需要对方法稍作修改。
我们用Python实现这一过程:
import numpy as np
from pyquaternion import Quaternion
defrelative_pose(q_C0_IMU, t_C0_IMU, q_C1_IMU, t_C1_IMU):
# 计算相对四元数
q_C0_C1 = q_C0_IMU * q_C1_IMU.inverse
# 计算相对位移
t_diff = np.array(t_C1_IMU)- np.array(t_C0_IMU)
t_C0_C1 = q_C0_IMU.rotate(t_diff)
return q_C0_C1, t_C0_C1.tolist()
# 定义 IMU 相对于 Camera0 和 Camera1 的四元数和位移
q_C0_IMU = Quaternion(w=0.6328142, x=0.3155095, y=-0.3155095, z=0.6328142)
t_C0_IMU =[0.234508,0.028785,0.039920]
q_C1_IMU = Quaternion(w=0.3155095, x=-0.6328142, y=-0.6328142, z=-0.3155095)
t_C1_IMU =[0.234508,0.028785,-0.012908]
q_C0_C1, t_C0_C1 = relative_pose(q_C0_IMU, t_C0_IMU, q_C1_IMU, t_C1_IMU)
print("相对于 Camera0 的 Camera1 四元数:", q_C0_C1)
print("相对于 Camera0 的 Camera1 位移:", t_C0_C1)这段代码首先定义了 IMU 相对于 Camera0 和 Camera1 的四元数和位移,然后计算它们之间的相对姿态(四元数表示)和相对位移。最后输出相对姿态和位移的结果。
这段 Python 代码应该能得出相机1相对于相机0的位姿。
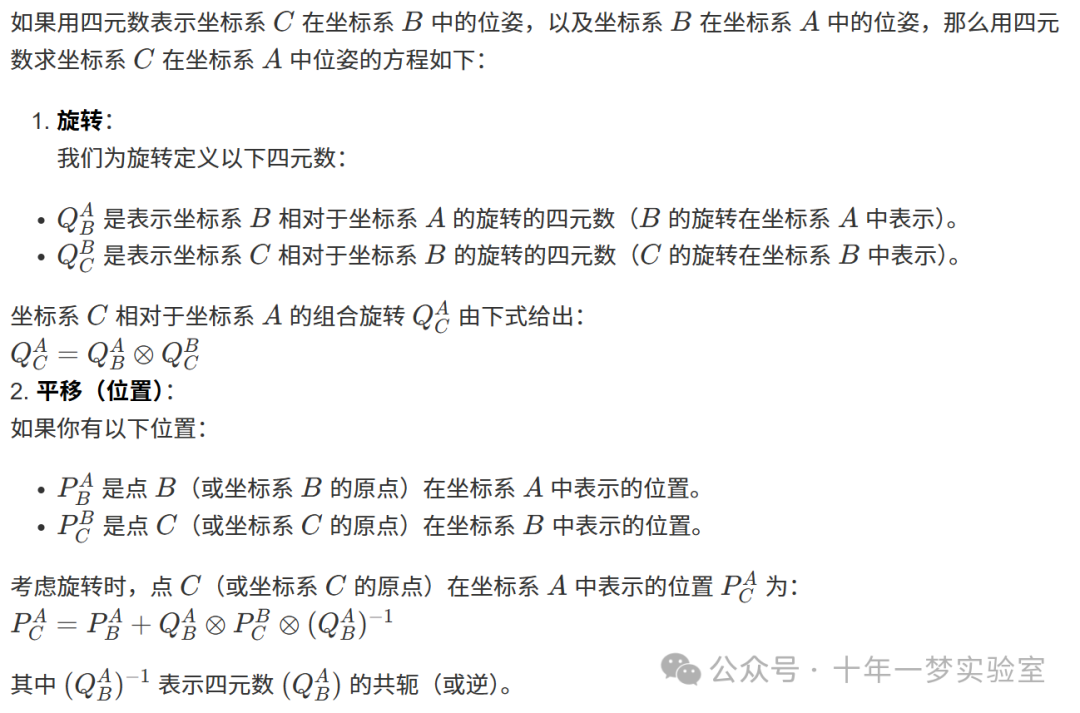
4.12.5 用四元数表示相对位姿(下标消去法)
4.13 四元数球面线性插值(Slerp)
下面是使用 C++ 和 Eigen 库实现四元数球面线性插值(Slerp)的代码示例:
#include <iostream>
#include <Eigen/Dense>
#include <Eigen/Geometry>
// 定义一个函数来进行四元数球面线性插值(Slerp)
Eigen::Quaterniond slerp(const Eigen::Quaterniond& q1,const Eigen::Quaterniond& q2,double t){
// 计算两个四元数之间的夹角
double dot_product = q1.dot(q2);
// 如果点积小于 0,取反以获得最短路径插值
if(dot_product <0.0){
q2 =-q2;
dot_product =-dot_product;
}
// 限制点积在 [0, 1] 之间
dot_product = std::clamp(dot_product,-1.0,1.0);
// 计算夹角 theta
double theta = std::acos(dot_product);
// 计算插值权重
double sin_theta = std::sqrt(1.0- dot_product * dot_product);
// 如果 sin(theta) 非常小(接近 0),直接返回线性插值
if(std::abs(sin_theta)<1e-6){
returnEigen::Quaterniond(
(1.0- t)* q1.coeffs()+ t * q2.coeffs()
).normalized();
}
// 使用 Slerp 公式计算插值四元数
double a = std::sin((1.0- t)* theta)/ sin_theta;
double b = std::sin(t * theta)/ sin_theta;
return(a * q1.coeffs()+ b * q2.coeffs()).normalized();
}
intmain(){
// 定义两个四元数
Eigen::Quaterniond q1(0.7071,0.0,0.7071,0.0);// 四元数1
Eigen::Quaterniond q2(0.0,0.7071,0.7071,0.0);// 四元数2
// 进行插值
double t =0.5;// 插值参数(0 <= t <= 1)
Eigen::Quaterniond q_interp =slerp(q1, q2, t);
// 输出结果
std::cout <<"Interpolated Quaternion: "<< q_interp.coeffs().transpose()<< std::endl;
return0;
}这段代码定义了一个函数 slerp,用于计算两个四元数之间的球面线性插值,并在 main 函数中示例化了两个四元数,并计算它们在 t=0.5
位置的插值。最后输出插值结果。
5. 不同表示形式之间的转换
此处查看完整转换列表 https://www.euclideanspace.com/maths/geometry/rotations/conversions/eulerToQuaternion/index.htm
四元数到其他旋转表示形式的转换
参考文献: https://github.com/gaoxiang12/slambook-en/blob/master/chapters/rigidBody.tex


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









