



目标:学习如何将机器人的状态广播到 tf2。
教程级别:中级
时间:15 分钟
目录
背景
先决条件
任务
1. 编写广播器节点
2. 编写启动文件
3. 构建
4.运行
摘要
背景
在接下来的两个教程中,我们将编写代码来复现“tf2 入门”教程中的演示。之后,后续教程将专注于使用更高级的 tf2 功能来扩展演示,包括在变换查找和时间旅行中使用超时。
先决条件
本教程假设您具有 ROS 2 的工作知识,并且您已经完成了 tf2 教程和 tf2 静态广播器教程(Python)的介绍。我们将重用上一个教程中的 learning_tf2_py 包。
在之前的教程中,您学习了如何创建工作区和创建包。
任务
1. 编写广播器节点
让我们先创建源文件。转到我们在上一教程中创建的 learning_tf2_py 包。在 src/learning_tf2_py/learning_tf2_py 目录中,通过输入以下命令下载示例广播代码:
cxy@ubuntu2404-cxy:~$ cd ~/ros2_ws/src/learning_tf2_py/learning_tf2_py
cxy@ubuntu2404-cxy:~/ros2_ws/src/learning_tf2_py/learning_tf2_py$ wget https://raw.githubusercontent.com/ros/geometry_tutorials/ros2/turtle_tf2_py/turtle_tf2_py/turtle_tf2_broadcaster.py现在使用您喜欢的文本编辑器打开名为 turtle_tf2_broadcaster.py 的文件。
# 版权 2021 开源机器人基金会
#
# 根据 Apache 许可证 2.0 版(“许可证”)授权;
# 除非符合许可证,否则您不得使用此文件。
# 您可以在以下网址获取许可证副本:
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# 除非适用法律要求或书面同意,否则根据许可证分发的软件
# 是按“原样”分发的,不附带任何明示或暗示的担保或条件。
# 请参阅许可证以了解管理权限和限制的特定语言。
import math # 导入数学模块
from geometry_msgs.msg import TransformStamped # 从geometry_msgs模块导入TransformStamped消息类型
import numpy as np # 导入numpy模块并简写为np
import rclpy # 导入rclpy模块
from rclpy.node import Node # 从rclpy.node模块导入Node类
from tf2_ros import TransformBroadcaster # 从tf2_ros模块导入TransformBroadcaster类
from turtlesim.msg import Pose # 从turtlesim.msg模块导入Pose消息类型
# 这个函数是简化版的代码,来自
# https://github.com/matthew-brett/transforms3d/blob/f185e866ecccb66c545559bc9f2e19cb5025e0ab/transforms3d/euler.py
# 除了简化之外,这个版本还颠倒了顺序以返回x,y,z,w,这是ROS所偏好的方式。
def quaternion_from_euler(ai, aj, ak):
ai /= 2.0 # 将ai除以2.0
aj /= 2.0 # 将aj除以2.0
ak /= 2.0 # 将ak除以2.0
ci = math.cos(ai) # 计算ai的余弦值
si = math.sin(ai) # 计算ai的正弦值
cj = math.cos(aj) # 计算aj的余弦值
sj = math.sin(aj) # 计算aj的正弦值
ck = math.cos(ak) # 计算ak的余弦值
sk = math.sin(ak) # 计算ak的正弦值
cc = ci*ck # 计算ci与ck的乘积
cs = ci*sk # 计算ci与sk的乘积
sc = si*ck # 计算si与ck的乘积
ss = si*sk # 计算si与sk的乘积
q = np.empty((4, )) # 创建一个空的四元数数组
q[0] = cj*sc - sj*cs # 计算四元数的第一个分量
q[1] = cj*ss + sj*cc # 计算四元数的第二个分量
q[2] = cj*cs - sj*sc # 计算四元数的第三个分量
q[3] = cj*cc + sj*ss # 计算四元数的第四个分量
return q # 返回四元数
class FramePublisher(Node): # 定义FramePublisher类,继承自Node类
def __init__(self):
super().__init__('turtle_tf2_frame_publisher') # 调用父类的构造函数,初始化节点名称为'turtle_tf2_frame_publisher'
# 声明并获取`turtlename`参数
self.turtlename = self.declare_parameter(
'turtlename', 'turtle').get_parameter_value().string_value
# 初始化变换广播器
self.tf_broadcaster = TransformBroadcaster(self)
# 订阅turtle{1}{2}/pose主题,并在每个消息上调用handle_turtle_pose回调函数
self.subscription = self.create_subscription(
Pose, # 消息类型,这里是 Pose 类型
f'/{self.turtlename}/pose', # 主题名称,这里是根据乌龟的名字动态生成的主题
self.handle_turtle_pose, # 回调函数,当接收到消息时调用这个函数
1 # 队列大小,表示最多可以缓存多少条消息
)
self.subscription # 防止未使用变量警告
def handle_turtle_pose(self, msg):
t = TransformStamped() # 创建TransformStamped对象
# 读取消息内容并将其分配给相应的tf变量
t.header.stamp = self.get_clock().now().to_msg() # 设置时间戳
t.header.frame_id = 'world' # 设置父坐标系ID
t.child_frame_id = self.turtlename # 设置子坐标系ID
# 乌龟只存在于2D,因此我们从消息中获取x和y平移坐标,并将z坐标设置为0
t.transform.translation.x = msg.x # 设置x平移坐标
t.transform.translation.y = msg.y # 设置y平移坐标
t.transform.translation.z = 0.0 # 设置z平移坐标为0
# 出于同样的原因,乌龟只能绕一个轴旋转,这就是为什么我们将x和y的旋转设置为0,并从消息中获取z轴的旋转
q = quaternion_from_euler(0, 0, msg.theta) # 计算四元数
t.transform.rotation.x = q[0] # 设置四元数的x分量
t.transform.rotation.y = q[1] # 设置四元数的y分量
t.transform.rotation.z = q[2] # 设置四元数的z分量
t.transform.rotation.w = q[3] # 设置四元数的w分量
# 发送变换
self.tf_broadcaster.sendTransform(t)
def main(): # 定义主函数
rclpy.init() # 初始化ROS客户端库
node = FramePublisher() # 创建FramePublisher节点
try:
rclpy.spin(node) # 让节点保持运行,直到被中断
except KeyboardInterrupt: # 如果收到键盘中断异常,则跳过
pass
rclpy.shutdown() # 关闭ROS客户端库
1.1 检查代码
现在,让我们来看一下与发布乌龟姿态到 tf2 相关的代码。首先,我们定义并获取一个参数 turtlename ,它指定了一个乌龟的名称,例如 turtle1 或 turtle2 。
self.turtlename = self.declare_parameter(
'turtlename', 'turtle').get_parameter_value().string_value随后,节点订阅主题 {self.turtlename}/pose 并在每条传入消息上运行函数 handle_turtle_pose 。
self .subscription = self.create_subscription(
Pose,
f'/{self.turtlename}/pose',
self.handle_turtle_pose,
1)现在,我们创建一个 TransformStamped 对象,并为其提供适当的元数据。
我们需要为正在发布的变换加上一个时间戳,我们将通过调用
self.get_clock().now()来用当前时间来标记它。这将返回Node使用的当前时间。然后我们需要设置我们正在创建的 Link 的父框架的名称,在这种情况下是
world。最后,我们需要设置我们正在创建的 Link 的子节点的名称,在这种情况下,这就是乌龟本身的名称。
处理函数为 turtle 姿态消息广播此 turtle 的平移和旋转,并将其作为从框架 world 到框架 turtleX 的变换进行发布。
t = TransformStamped()
# Read message content and assign it to
# corresponding tf variables
t.header.stamp = self.get_clock().now().to_msg()
t.header.frame_id = 'world'
t.child_frame_id = self.turtlename在这里,我们将 3D 乌龟姿势的信息复制到 3D 变换中。
# Turtle only exists in 2D, thus we get x and y translation
# coordinates from the message and set the z coordinate to 0
t.transform.translation.x = msg.x
t.transform.translation.y = msg.y
t.transform.translation.z = 0.0
# For the same reason, turtle can only rotate around one axis
# and this why we set rotation in x and y to 0 and obtain
# rotation in z axis from the message
q = quaternion_from_euler(0, 0, msg.theta)
t.transform.rotation.x = q[0]
t.transform.rotation.y = q[1]
t.transform.rotation.z = q[2]
t.transform.rotation.w = q[3]最后我们将构建的转换传递给 TransformBroadcaster 的 sendTransform 方法,由它来负责广播。
# Send the transformation
self.tf_broadcaster.sendTransform(t)1.2 添加一个入口点
要允许 ros2 run 命令运行您的节点,您必须将入口点添加到 setup.py (位于 src/learning_tf2_py 目录中)。
在 'console_scripts': 括号之间添加以下行:
'turtle_tf2_broadcaster = learning_tf2_py.turtle_tf2_broadcaster:main',2. 编写启动文件
现在为这个演示创建一个启动文件。在 src/learning_tf2_py 目录中创建一个 launch 文件夹。使用你的文本编辑器,在 launch 文件夹中创建一个名为 turtle_tf2_demo_launch.py 的新文件,并添加以下几行:
from launch import LaunchDescription # 从launch模块导入LaunchDescription类
from launch_ros.actions import Node # 从launch_ros.actions模块导入Node类
def generate_launch_description(): # 定义generate_launch_description函数
return LaunchDescription([ # 返回一个LaunchDescription对象
Node(
package='turtlesim', # 指定节点所属的包名为'turtlesim'
executable='turtlesim_node', # 指定可执行文件名为'turtlesim_node'
name='sim' # 指定节点名称为'sim'
),
Node(
package='learning_tf2_py', # 指定节点所属的包名为'learning_tf2_py'
executable='turtle_tf2_broadcaster', # 指定可执行文件名为'turtle_tf2_broadcaster'
name='broadcaster1', # 指定节点名称为'broadcaster1'
parameters=[
{'turtlename': 'turtle1'} # 设置参数'turtlename'的值为'turtle1'
]
),
])2.1 检查代码
首先,我们从 launch 和 launch_ros 包中导入所需的模块。应当指出, launch 是一个通用的启动框架(不特定于 ROS 2),而 launch_ros 包含了 ROS 2 特定的内容,比如我们在这里导入的节点。
from launch import LaunchDescription
from launch_ros.actions import Node现在我们运行节点,启动 turtlesim 模拟并使用我们的 turtle_tf2_broadcaster 节点将 turtle1 状态广播到 tf2。
Node(
package='turtlesim',
executable='turtlesim_node',
name='sim'
),
Node(
package='learning_tf2_py',
executable='turtle_tf2_broadcaster',
name='broadcaster1',
parameters=[
{'turtlename': 'turtle1'}
]
),2.2 添加依赖项
返回到 learning_tf2_py 目录,该目录中包含 setup.py 、 setup.cfg 和 package.xml 文件。
打开 package.xml 并使用文本编辑器。根据启动文件的导入语句添加以下依赖项:
<exec_depend>launch</exec_depend>
<exec_depend>launch_ros</exec_depend>此声明在执行其代码时需要额外的 launch 和 launch_ros 依赖项。
确保保存文件。
<?xml version="1.0"?> <!-- XML版本为1.0 -->
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?> <!-- XML模型的链接和模型类型 -->
<package format="3"> <!-- 包格式为3 -->
<name>learning_tf2_py</name> <!-- 包名为learning_tf2_py -->
<version>0.0.0</version> <!-- 版本号为0.0.0 -->
<description>Learning tf2 with rclpy</description> <!-- 包的描述 -->
<maintainer email="cxy@126.com">cxy</maintainer> <!-- 维护者的信息 -->
<license>Apache-2.0</license> <!-- 许可证信息 -->
<exec_depend>geometry_msgs</exec_depend> <!-- 执行依赖:geometry_msgs -->
<exec_depend>python3-numpy</exec_depend> <!-- 执行依赖:python3-numpy -->
<exec_depend>rclpy</exec_depend> <!-- 执行依赖:rclpy -->
<exec_depend>tf2_ros_py</exec_depend> <!-- 执行依赖:tf2_ros_py -->
<exec_depend>turtlesim</exec_depend> <!-- 执行依赖:turtlesim -->
<exec_depend>launch</exec_depend> <!-- 执行依赖:launch -->
<exec_depend>launch_ros</exec_depend> <!-- 执行依赖:launch_ros -->
<test_depend>ament_copyright</test_depend> <!-- 测试依赖:ament_copyright -->
<test_depend>ament_flake8</test_depend> <!-- 测试依赖:ament_flake8 -->
<test_depend>ament_pep257</test_depend> <!-- 测试依赖:ament_pep257 -->
<test_depend>python3-pytest</test_depend> <!-- 测试依赖:python3-pytest -->
<export>
<build_type>ament_python</build_type> <!-- 构建类型为ament_python -->
</export>
</package> <!-- 包定义结束 -->2.3 更新 setup.py
重新打开 setup.py 并添加该行,以便安装来自 launch/ 文件夹的启动文件。 data_files 字段现在应该如下所示:
data_files=[
...
(os.path.join('share', package_name, 'launch'), glob(os.path.join('launch', '*launch.[pxy][yma]*'))),
],同时在文件顶部添加适当的导入:
import os
from glob import glob您可以在本教程中了解更多关于创建启动文件的信息。
import os
from glob import glob
from setuptools import find_packages, setup # 导入setuptools模块的find_packages和setup函数
package_name = 'learning_tf2_py' # 定义包名为learning_tf2_py
setup( # 使用setup函数进行包的设置
name=package_name, # 包名
version='0.0.0', # 版本号
packages=find_packages(exclude=['test']), # 使用find_packages函数找到所有的包,排除名为'test'的包
data_files=[ # 数据文件
('share/ament_index/resource_index/packages',
['resource/' + package_name]), # 资源文件
('share/' + package_name, ['package.xml']), # 包的XML描述文件
(os.path.join('share', package_name, 'launch'), glob(os.path.join('launch', '*launch.[pxy][yma]*'))), # launch文件
],
install_requires=['setuptools'], # 安装依赖,需要setuptools
zip_safe=True, # 设置zip_safe为True,表示此包可以安全地作为zip文件进行分发
maintainer='cxy', # 维护者名字
maintainer_email='cxy@126.com', # 维护者邮箱
description='TODO: Package description', # 包的描述
license='Apache-2.0', # 许可证信息
tests_require=['pytest'], # 测试依赖,需要pytest
entry_points={ # 入口点
'console_scripts': [ # 控制台脚本
'static_turtle_tf2_broadcaster = learning_tf2_py.static_turtle_tf2_broadcaster:main', # 静态turtle_tf2广播器的主函数
'turtle_tf2_broadcaster = learning_tf2_py.turtle_tf2_broadcaster:main', # turtle_tf2广播器的主函数
],
},
)3. 构建
在工作区的根目录运行 rosdep 以检查缺失的依赖项。
rosdep install -i --from-path src --rosdistro jazzy -y仍在工作区的根目录下,构建您的包:
colcon build --packages-select learning_tf2_py打开一个新的终端,导航到工作区的根目录,然后加载设置文件:
. install/setup.bash4. 运行
现在运行启动文件,它将启动 turtlesim 仿真节点和 turtle_tf2_broadcaster 节点:
ros2 launch learning_tf2_py turtle_tf2_demo_launch.py在第二个终端窗口中输入以下命令:
ros2 run turtlesim turtle_teleop_key您现在将看到 turtlesim 模拟已经开始,您可以控制一只乌龟。
现在,使用 tf2_echo 工具来检查海龟姿势是否真的正在向 tf2 广播:
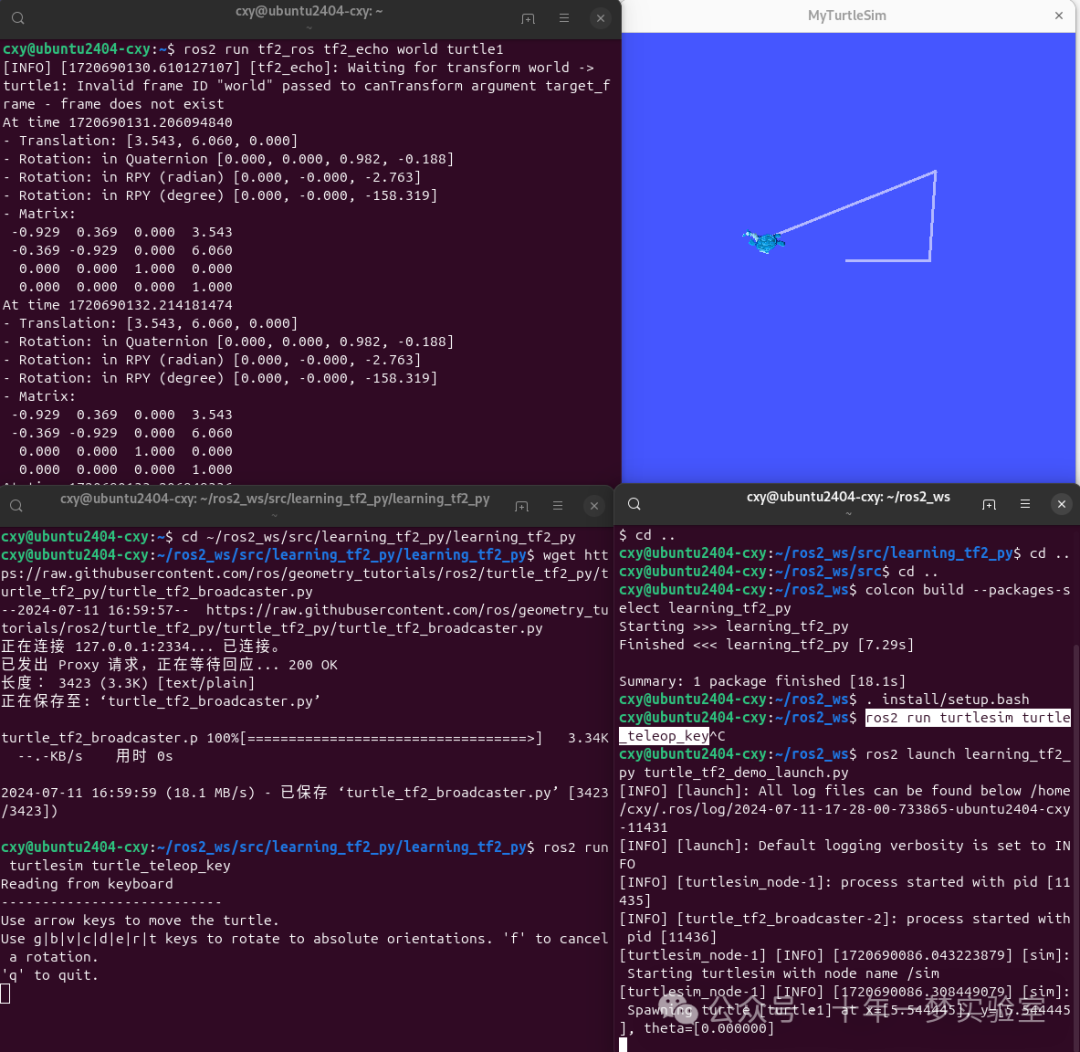
ros2 run tf2_ros tf2_echo world turtle1这应该会显示第一只乌龟的姿势。使用箭头键绕着乌龟开(确保你的 turtle_teleop_key 终端窗口是活跃的,不是你的模拟器窗口)。在你的控制台输出中,你会看到类似这样的东西:
cxy@ubuntu2404-cxy:~$ ros2 run tf2_ros tf2_echo world turtle1
[INFO] [1720690130.610127107] [tf2_echo]: Waiting for transform world -> turtle1: Invalid frame ID "world" passed to canTransform argument target_frame - frame does not exist
At time 1720690131.206094840
- Translation: [3.543, 6.060, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.982, -0.188]
- Rotation: in RPY (radian) [0.000, -0.000, -2.763]
- Rotation: in RPY (degree) [0.000, -0.000, -158.319]
- Matrix:
-0.929 0.369 0.000 3.543
-0.369 -0.929 0.000 6.060
0.000 0.000 1.000 0.000
0.000 0.000 0.000 1.000如果您运行 tf2_echo 以实现 world 和 turtle2 之间的转换,您不应该看到任何转换,因为第二只乌龟还没有出现。然而,一旦我们在下一个教程中添加了第二只乌龟, turtle2 的姿态将会广播到 tf2。
摘要
在本教程中,您学习了如何将机器人的姿态(乌龟的位置和方向)广播到 tf2,以及如何使用 tf2_echo 工具。为了实际使用广播到 tf2 的变换,您应该继续学习下一教程,关于创建 tf2 监听器。

















 1378
1378

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









