






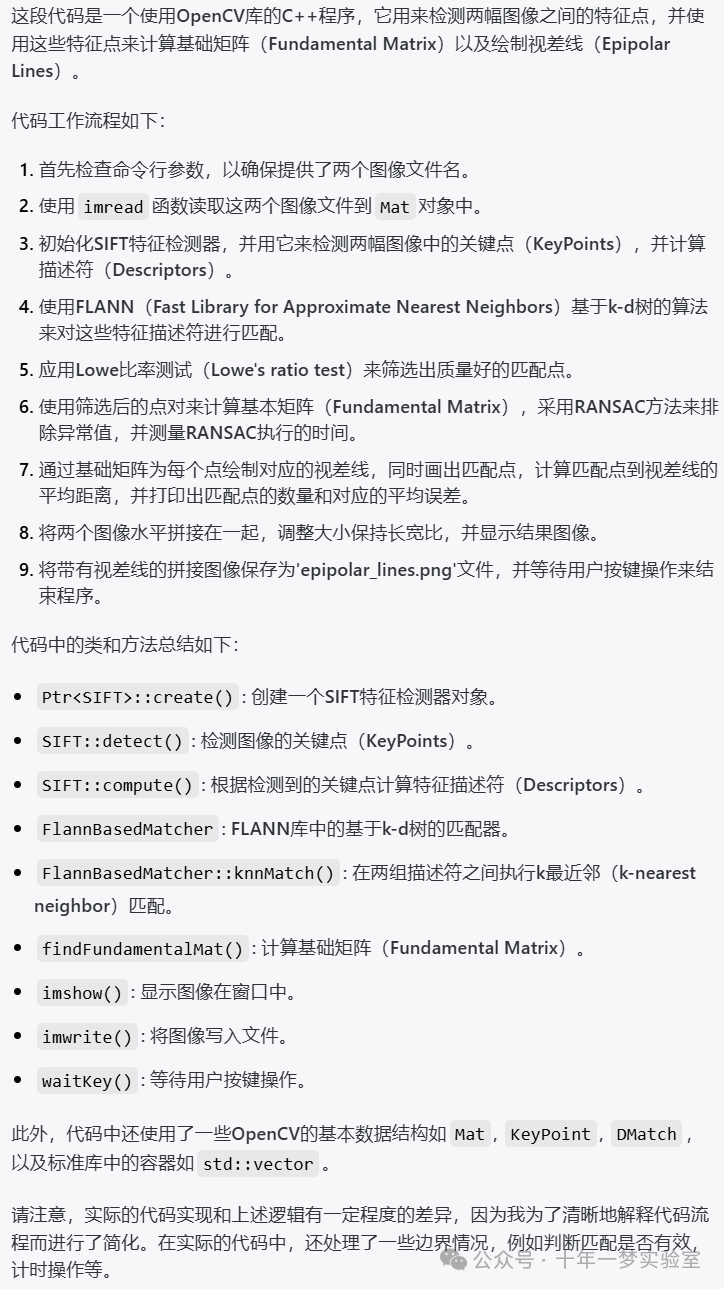
这段代码总的功能是使用OpenCV库进行立体视觉的估计。它从命令行读取两个图像文件名,使用SIFT算法检测关键点并计算这些点的描述子,接着通过FLANN库进行快速近似最近邻搜索来找到匹配的关键点。然后使用RANSAC方法计算基础矩阵,找到内点,并绘制出对极线和对应的点。最后将处理后的图像显示出来,并且保存到文件。这个程序是处理和展示两个图像之间的对应关系和极线(epilines)的。
// 这个文件属于OpenCV项目的一部分。
// 它服从发现在顶级目录的LICENSE文件中的许可条款
// 以及在http://opencv.org/license.html 网址中的条款。
#include "opencv2/calib3d.hpp" // 包含用于相机标定和三维重建的函数和类
#include "opencv2/highgui.hpp" // 包含GUI功能,如显示和保存图像,处理鼠标事件等。
#include "opencv2/imgproc.hpp" // 包含图像处理的功能如滤波,几何变换等。
#include <vector> // 包含标准模板库的vector容器
#include <iostream> // 包含标准输入输出库
using namespace cv; // 使用OpenCV命名空间中的所有成员
// 主函数,程序的入口点
int main(int argc, char** argv) {
std::string img_name1, img_name2; // 声明两个string变量,用来存放两幅图像的名字
if (argc < 3) { // 如果命令行参数少于3个(包括程序本身的名称)
CV_Error(Error::StsBadArg, // 抛出一个错误
"Path to two images \nFor example: " // 并显示错误信息
"./epipolar_lines img1.jpg img2.jpg");
} else {
img_name1 = argv[1]; // 把第一个图像的文件名赋给img_name1
img_name2 = argv[2]; // 把第二个图像的文件名赋给img_name2
}
Mat image1 = imread(img_name1); // 读取第一幅图像
Mat image2 = imread(img_name2); // 读取第二幅图像
Mat descriptors1, descriptors2; // 定义两个Mat对象,用来存放两组特征描述
std::vector<KeyPoint> keypoints1, keypoints2; // 定义两个 KeyPoint 类型的向量,用来存储两组关键点
Ptr<SIFT> detector = SIFT::create(); // 创建SIFT检测器
detector->detect(image1, keypoints1); // 在第一幅图像中检测关键点
detector->detect(image2, keypoints2); // 在第二幅图像中检测关键点
detector->compute(image1, keypoints1, descriptors1); // 计算第一幅图像中关键点的特征描述
detector->compute(image2, keypoints2, descriptors2); // 计算第二幅图像中关键点的特征描述
FlannBasedMatcher matcher(makePtr<flann::KDTreeIndexParams>(5), makePtr<flann::SearchParams>(32)); // 使用基于FLANN的匹配器,初始化为带有两个参数的构造函数
// 获取k=2个最佳匹配以便可以应用由D.Lowe解释的比率测试
std::vector<std::vector<DMatch>> matches_vector; // 定义一个DMatch向量的向量,用来存放匹配对
matcher.knnMatch(descriptors1, descriptors2, matches_vector, 2); // 在两组描述子之间进行k邻近匹配
std::vector<Point2d> pts1, pts2; // 定义两个Point2d向量,用于存放匹配点的坐标
pts1.reserve(matches_vector.size()); // 为pts1预留足够大小的内存空间
pts2.reserve(matches_vector.size()); // 为pts2预留足够大小的内存空间
for (const auto &m : matches_vector) { // 遍历所有的匹配对
// 对最佳匹配和次佳匹配应用Lowe比率测试
if (m[0].distance / m[1].distance < 0.75) { // 如果最佳匹配与次佳匹配的距离比小于0.75
pts1.emplace_back(keypoints1[m[0].queryIdx].pt); // 把第一幅图像中的匹配点坐标添加到pts1
pts2.emplace_back(keypoints2[m[0].trainIdx].pt); // 把第二幅图像中的匹配点坐标添加到pts2
}
}
std::cout << "Number of points " << pts1.size() << '\n'; // 输出匹配点的数量
Mat inliers; // 定义一个Mat对象,去存放内点
const auto begin_time = std::chrono::steady_clock::now(); // 记录RANSAC寻找基础矩阵开始的时间
const Mat F = findFundamentalMat(pts1, pts2, RANSAC, 1., 0.99, 2000, inliers); // 使用RANSAC算法计算基础矩阵
// 输出RANSAC算法寻找基础矩阵所花时间
std::cout << "RANSAC fundamental matrix time " << static_cast<int>(std::chrono::duration_cast<std::chrono::microseconds>
(std::chrono::steady_clock::now() - begin_time).count()) << "\n";
Mat points1 = Mat((int)pts1.size(), 2, CV_64F, pts1.data()); // 将pts1中的点转换为Mat格式用于进一步计算
Mat points2 = Mat((int)pts2.size(), 2, CV_64F, pts2.data()); // 将pts2中的点转换为Mat格式用于进一步计算
vconcat(points1.t(), Mat::ones(1, points1.rows, points1.type()), points1); // 把points1转置并添加一行1,生成齐次坐标
vconcat(points2.t(), Mat::ones(1, points2.rows, points2.type()), points2); // 把points2转置并添加一行1,生成齐次坐标
RNG rng; // 随机数生成器
const int circle_sz = 3, line_sz = 1, max_lines = 300; // 定义绘制圆的大小,线的大小,以及最大线的数量
std::vector<int> pts_shuffle (points1.cols); // 创建一个向量用来存放随机顺序的点的索引
for (int i = 0; i < points1.cols; i++) // 初始化pts_shuffle向量
pts_shuffle[i] = i;
randShuffle(pts_shuffle); // 对点的索引进行随机排序
int plot_lines = 0, num_inliers = 0; // 记录绘制的直线数和内点数
double mean_err = 0; // 记录点到对极线的平均距离
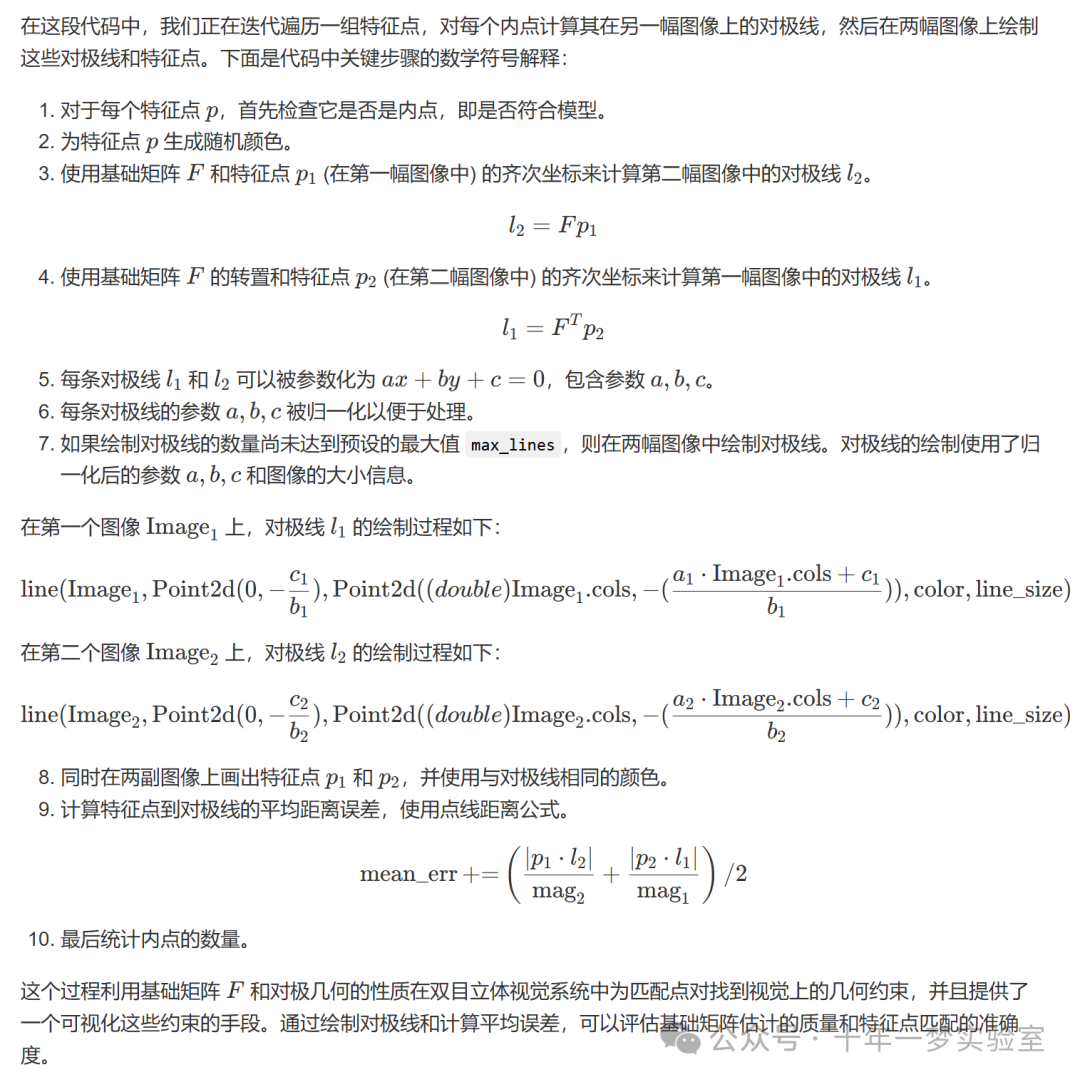
// 遍历点,绘制对极线和点,计算平均距离
for (int pt : pts_shuffle) { // 遍历随机顺序的点
if (inliers.at<uchar>(pt)) { // 如果是内点
const Scalar col (rng.uniform(0,256), rng.uniform(0,256), rng.uniform(0,256)); // 随机生成颜色
const Mat l2 = F * points1.col(pt); // 用基础矩阵F和齐次坐标,计算第二个图像中的对极线
const Mat l1 = F.t() * points2.col(pt); // 用基础矩阵F的转置和齐次坐标,计算第一个图像中的对极线
// 提取对极线的参数
double a1 = l1.at<double>(0), b1 = l1.at<double>(1), c1 = l1.at<double>(2);
double a2 = l2.at<double>(0), b2 = l2.at<double>(1), c2 = l2.at<double>(2);
// 对极线参数进行归一化
const double mag1 = sqrt(a1*a1 + b1*b1), mag2 = (a2*a2 + b2*b2);
a1 /= mag1; b1 /= mag1; c1 /= mag1; a2 /= mag2; b2 /= mag2; c2 /= mag2;
// 如果没有绘制太多的线,就绘制对极线
if (plot_lines++ < max_lines) {
// 在第一个图像上绘制对极线
line(image1, Point2d(0, -c1/b1),
Point2d((double)image1.cols, -(a1*image1.cols+c1)/b1), col, line_sz);
// 在第二个图像上绘制对极线
line(image2, Point2d(0, -c2/b2),
Point2d((double)image2.cols, -(a2*image2.cols+c2)/b2), col, line_sz);
}
// 在两幅图像上绘制内点
circle (image1, pts1[pt], circle_sz, col, -1);
circle (image2, pts2[pt], circle_sz, col, -1);
// 计算点到对极线的平均距离
mean_err += (fabs(points1.col(pt).dot(l2)) / mag2 + fabs(points2.col(pt).dot(l1) / mag1)) / 2;
num_inliers++; // 内点数自增
}
}
// 输出内点到对极线的平均距离和内点数
std::cout << "Mean distance from tentative inliers to epipolar lines " << mean_err/num_inliers
<< " number of inliers " << num_inliers << "\n";
// 将两幅图像横向拼接
hconcat(image1, image2, image1);
const int new_img_size = 1200 * 800; // 定义新图像的大小
// 调整图像大小,并保持原始的宽高比
resize(image1, image1, Size((int) sqrt ((double) image1.cols * new_img_size / image1.rows),
(int)sqrt ((double) image1.rows * new_img_size / image1.cols)));
// 创建一个窗口并显示处理后的图像
imshow("epipolar lines, image 1, 2", image1);
imwrite("epipolar_lines.png", image1); // 保存图像到文件
waitKey(0); // 等待用户按键
}
FlannBasedMatcher matcher(makePtr<flann::KDTreeIndexParams>(5), makePtr<flann::SearchParams>(32)); // 使用基于FLANN的匹配器,初始化为带有两个参数的构造函数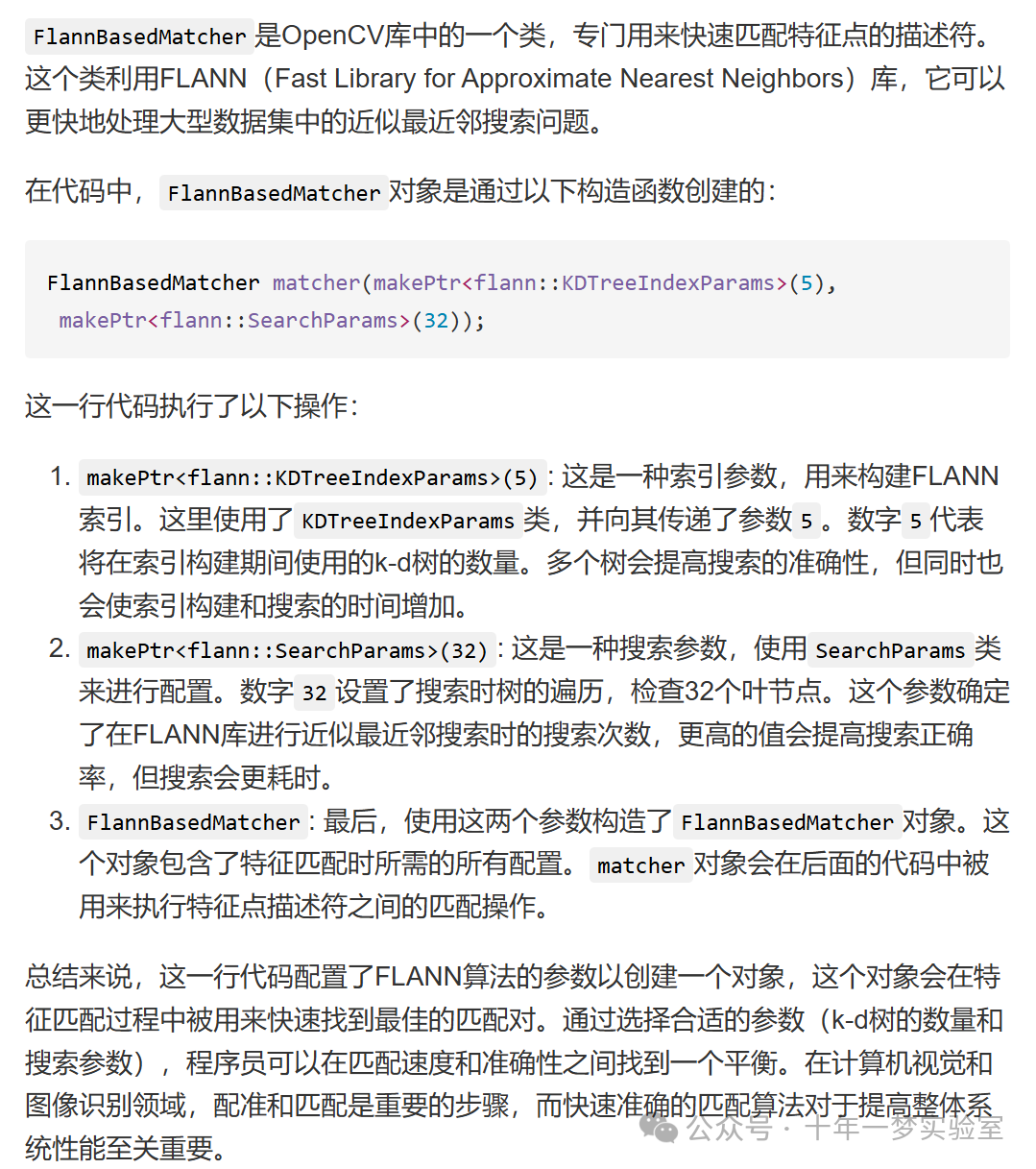
pts1.reserve(matches_vector.size());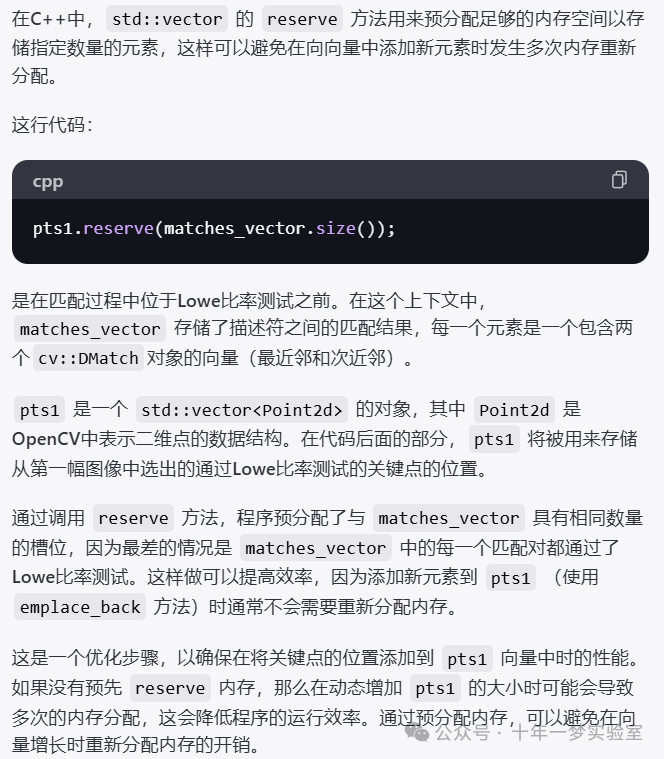
const Mat F = findFundamentalMat(pts1, pts2, RANSAC, 1., 0.99, 2000, inliers);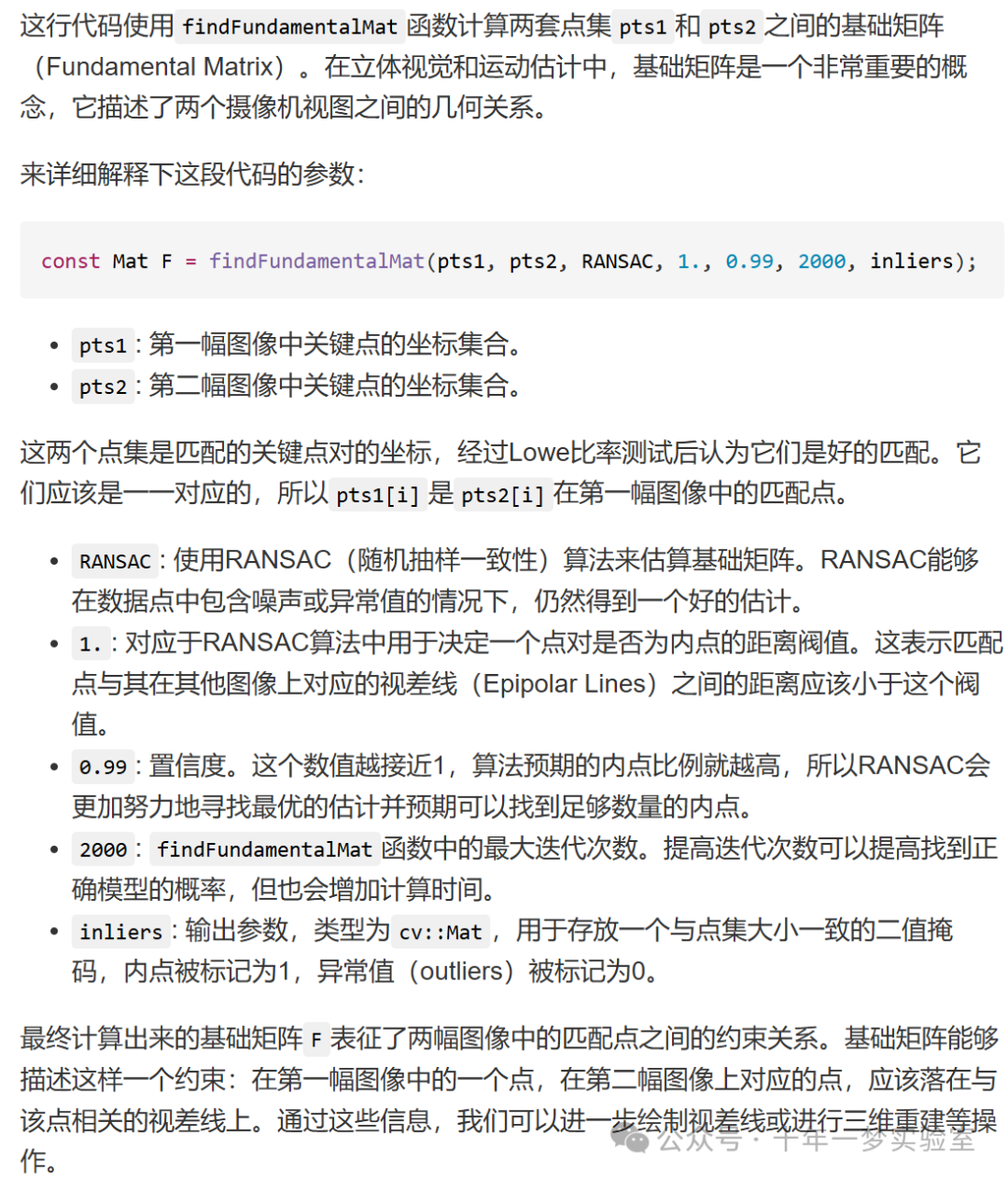
const auto begin_time = std::chrono::steady_clock::now();
std::cout << "RANSAC fundamental matrix time " << static_cast<int>(std::chrono::duration_cast<std::chrono::microseconds>
(std::chrono::steady_clock::now() - begin_time).count()) << "\n";
对极线的绘制:
for (int pt : pts_shuffle) {
if (inliers.at<uchar>(pt)) {
const Scalar col (rng.uniform(0,256), rng.uniform(0,256), rng.uniform(0,256));
const Mat l2 = F * points1.col(pt);
const Mat l1 = F.t() * points2.col(pt);
double a1 = l1.at<double>(0), b1 = l1.at<double>(1), c1 = l1.at<double>(2);
double a2 = l2.at<double>(0), b2 = l2.at<double>(1), c2 = l2.at<double>(2);
const double mag1 = sqrt(a1*a1 + b1*b1), mag2 = (a2*a2 + b2*b2);
a1 /= mag1; b1 /= mag1; c1 /= mag1; a2 /= mag2; b2 /= mag2; c2 /= mag2;
if (plot_lines++ < max_lines) {
line(image1, Point2d(0, -c1/b1),
Point2d((double)image1.cols, -(a1*image1.cols+c1)/b1), col, line_sz);
line(image2, Point2d(0, -c2/b2),
Point2d((double)image2.cols, -(a2*image2.cols+c2)/b2), col, line_sz);
}
circle (image1, pts1[pt], circle_sz, col, -1);
circle (image2, pts2[pt], circle_sz, col, -1);
mean_err += (fabs(points1.col(pt).dot(l2)) / mag2 + fabs(points2.col(pt).dot(l1) / mag1)) / 2;
num_inliers++;
}
}
The End

















 5641
5641

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









