



 本文探讨了机器人开链的运动学模型及其在不同配置下的特性,包括运动学奇异性和操控性椭球的概念。此外,还介绍了如何通过软件计算身体坐标系和空间坐标系下的雅可比矩阵。
本文探讨了机器人开链的运动学模型及其在不同配置下的特性,包括运动学奇异性和操控性椭球的概念。此外,还介绍了如何通过软件计算身体坐标系和空间坐标系下的雅可比矩阵。
一、 本章小结
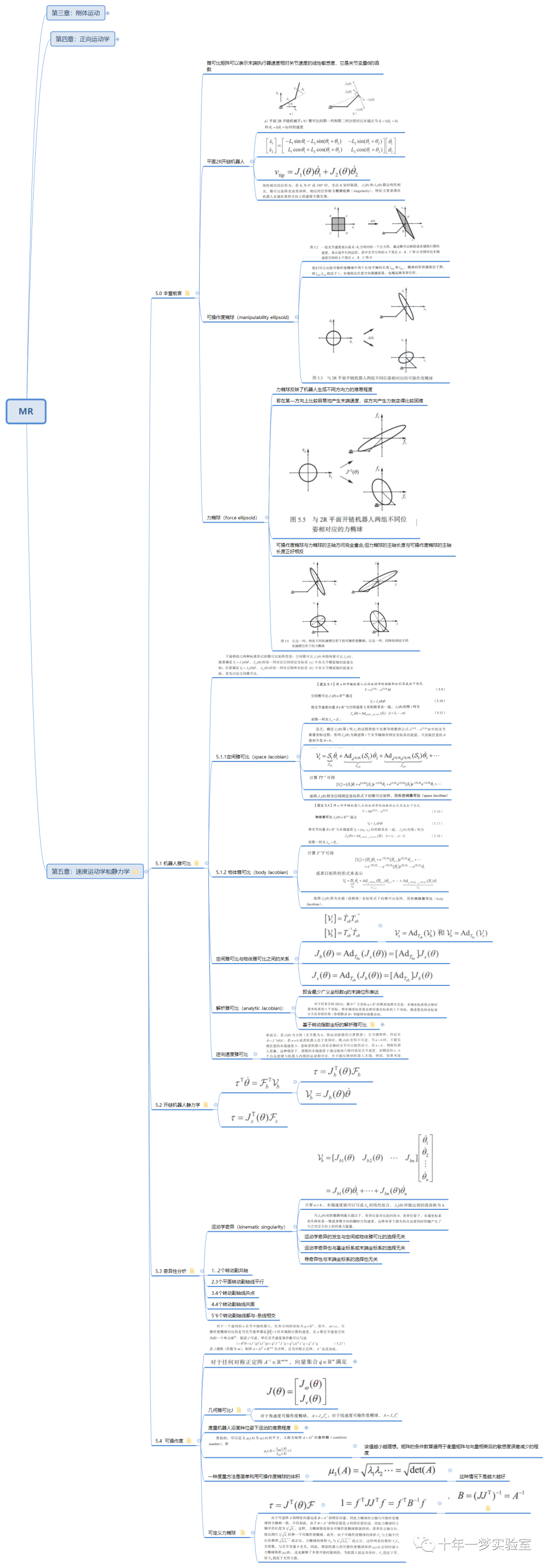
Let the forward kinematics of an n-link open chain be expressed in the following product of exponentials form:

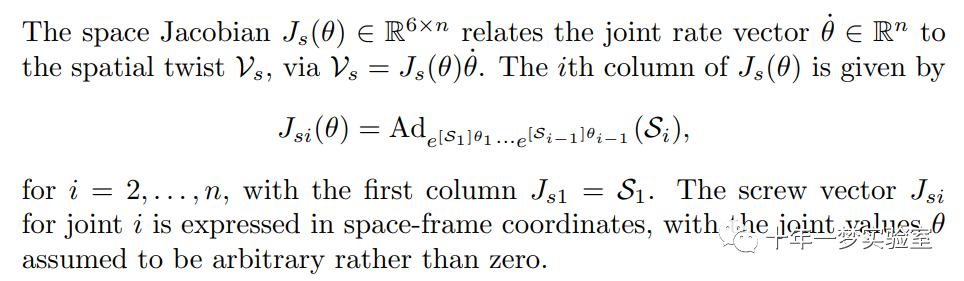
Let the forward kinematics of an n-link open chain be expressed in the following product of exponentials form:
The body and space Jacobians are related via

考虑具有 n 个单自由度关节的空间开链,假设处于静态平衡状态
Consider a spatial open chain with n one-dof joints that is assumed to be in static equilibrium(静态平衡). Let τ ∈ R n denote the vector of the joint torques and forces and F ∈ R 6 be the wrench applied at the end-effector, in either space- or body-frame coordinates. Then τ and F are related by

运动学奇异是指当雅可比矩阵不满秩情况下的任一位形θ:
A kinematically singular configuration for an open chain, or more simply a kinematic singularity, is any configuration θ ∈ R(n) at which the rank of the Jacobian is not maximal. For six-dof spatial open chains consisting of revolute and prismatic joints, some common singularities include (i) two collinear revolute joint axes; (ii) three coplanar and parallel revolute joint axes; (iii) four revolute joint axes intersecting at a common point; (iv) four coplanar revolute joints; and (v) six revolute joints intersecting a common line.
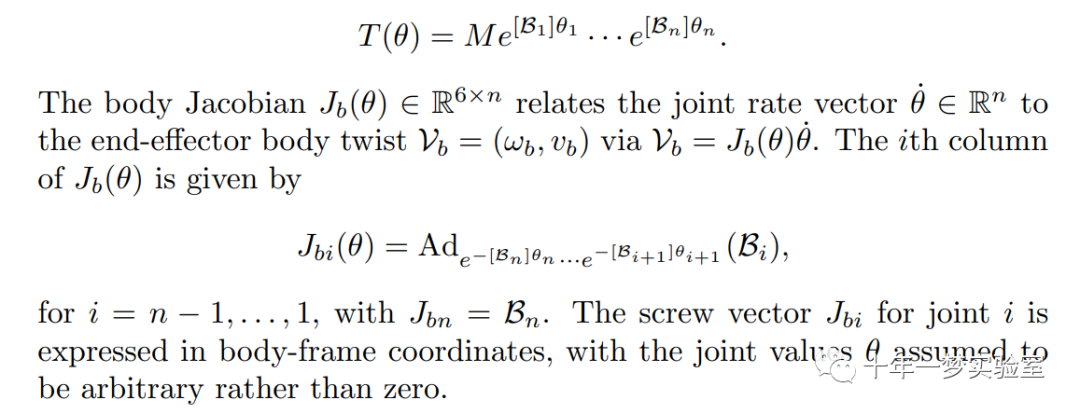
可操作性椭球描述了机器人在不同方向上移动的难易程度。
力椭球描述了机器人在不同方向上产生力的难易程度。

可操作度椭球与力椭球的度量指标包括
Measures of the manipulability and force ellipsoids include the ratio of the longest principal semi-axis to the shortest(长半轴与短半轴比值); the square of this measure; and the volume of the ellipsoid. The first two measures indicate that the robot is far from being singular if they are small (close to 1).
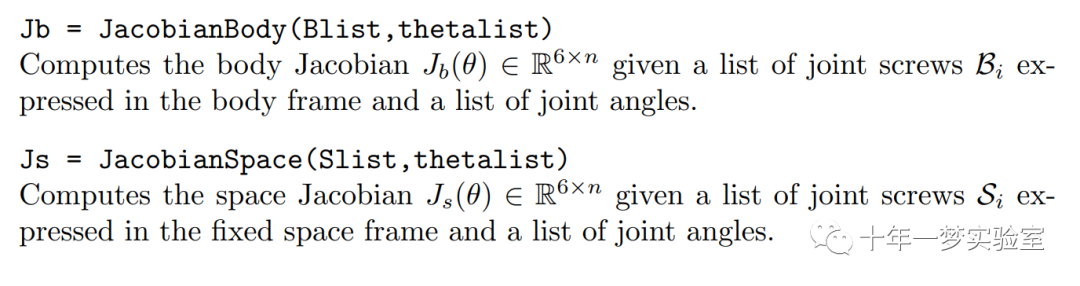
二、软件
Jb = JacobianBody(Blist,thetalist)
Js = JacobianSpace(Slist,thetalist)
The End

















 2315
2315

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









