




8维状态量(2维位置、2维速度、航向角、航向角偏置、2维加速度计偏置)+4维观测量(2维位置、2维速度)。
程序详解
程序概述
本例程实现了 基于 8 维误差状态模型的扩展卡尔曼滤波 (EKF),用于 IMU 与 GNSS 的组合导航。
状态向量为:
x = [ p x p y v x v y ψ b g b a x b a y ] T x = \begin{bmatrix} p_x & p_y & v_x & v_y & \psi & b_g & b_{ax} & b_{ay} \end{bmatrix}^T x=[pxpyvxvyψbgbaxbay]T
分别表示位置、速度、航向角、陀螺零偏、加速度计零偏。
系统主要功能包括:
- 真实轨迹生成(圆轨迹运动,角速度已知);
- IMU 模拟积分(仅用 IMU 数据进行位置速度积分,作为对比);
- EKF 滤波器实现:状态预测 + 观测更新;
- GNSS观测引入(位置与速度观测,每秒更新一次);
- 滤波结果可视化与误差统计(轨迹对比、误差曲线、RMSE)。
EKF 预测与更新
- 协方差预测
- 观测方程(GNSS 提供位置和速度)
- 卡尔曼增益
- 状态与协方差更新
核心代码片段
- 状态转移
x_next(5) = x(5) + (imu(3) - x(6)) * dt; % 航向角更新
C_bn = euler_to_dcm(0,0,x(5));
f_corrected = imu(1:2) - x(7:8);
x_next(3:4) = x(3:4) + C_bn(1:2,1:2) * f_corrected * dt; % 速度更新
x_next(1:2) = x(1:2) + x(3:4) * dt; % 位置更新
- 雅可比矩阵
F = eye(8);
F(1,3) = dt; F(2,4) = dt; % 位置对速度
df_dyaw = [-sin(yaw), -cos(yaw); cos(yaw), -sin(yaw)] * f * dt;
F(3:4,5) = df_dyaw; % 速度对航向角
F(3:4,7:8) = -C(1:2,1:2) * dt; % 速度对加计偏差
F(5,6) = -dt; % 航向角对陀螺偏差
- 观测模型
H = zeros(4,8);
H(1:2,1:2) = eye(2); % 位置
H(3:4,3:4) = eye(2); % 速度
运行结果
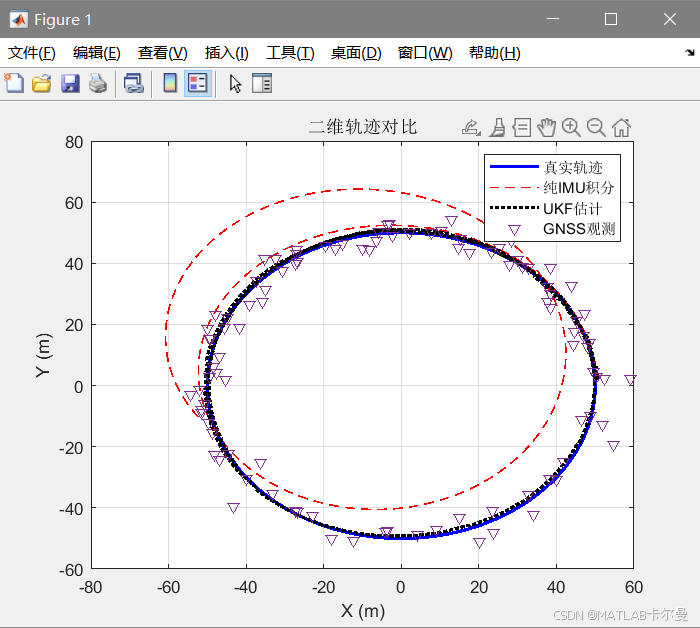
定位导航轨迹示意图:
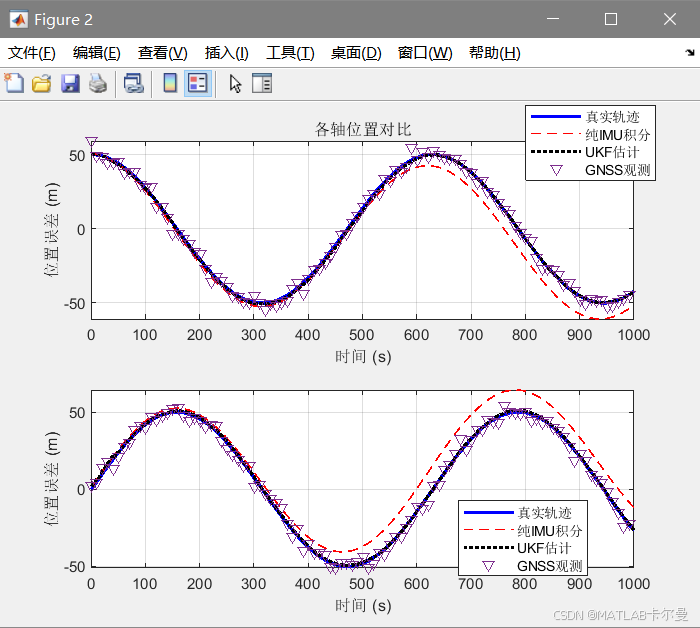
各方法得到的XY两个轴的位移-时间图像:
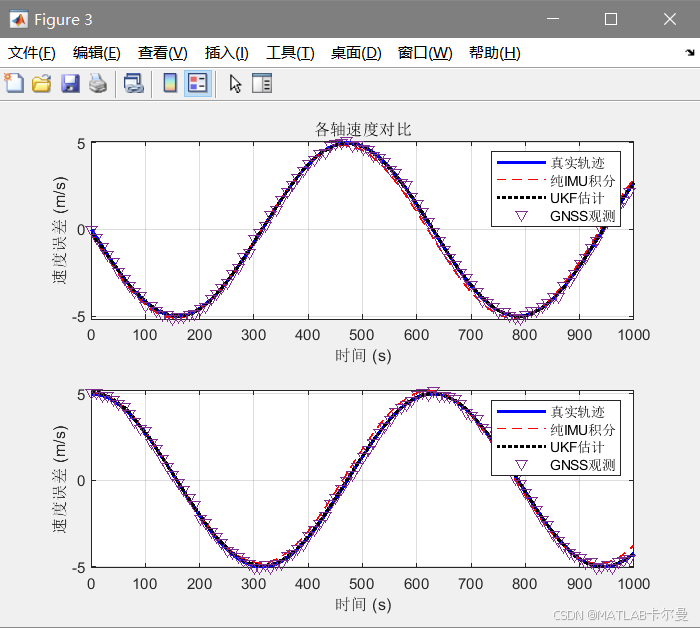
各方法得到的XY两各轴的速度-时间图像:
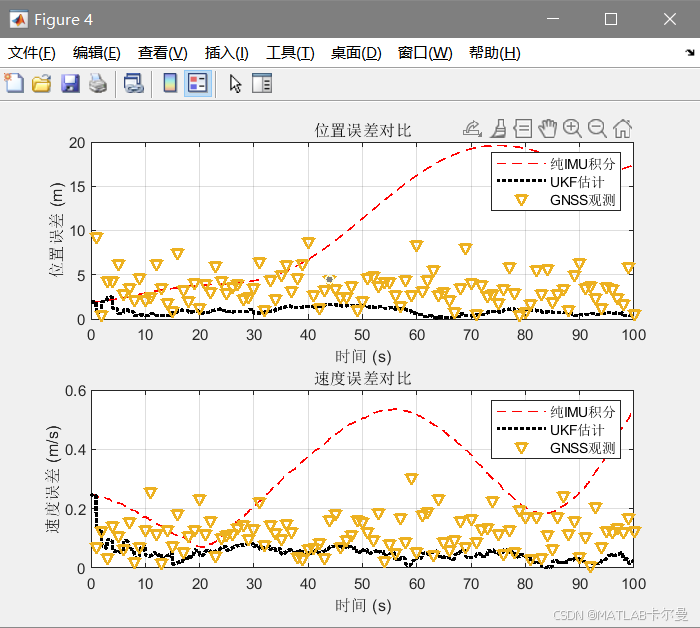
各方法得到的位置误差与速度误差:
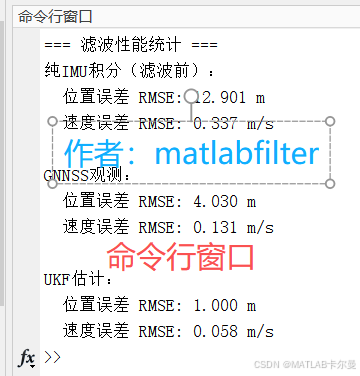
误差统计特性:
MATLAB源代码
完整代码如下:
% 二维状态量的EKF例程(有严格的组合导航推导)
% 基于8维误差状态模型:位置、速度、航向、航向角角速度偏差、加速度计偏差
% 作者:matlabfilter
% 2025-08-27/Ver1
clear; clc; close all;
rng(0); % 固定随机种子
%% 系统参数设置
dt = 0.1; % 采样时间间隔 (s)
total_time = 100; % 总仿真时间 (s)
N = total_time / dt; % 采样点数
%% 噪声参数设置
% IMU噪声参数
gyro_noise_std = 0.1 * pi/180; % 陀螺噪声标准差 (rad/s)
accel_noise_std = 0.01; % 加速度计噪声标准差 (m/s^2)
gyro_bias_std = 0.01 * pi/180; % 陀螺偏差标准差 (rad/s)
accel_bias_std = 0.001; % 加速度计偏差标准差 (m/s^2)
% GNSS观测噪声
gnss_pos_noise_std = 3; % GNSS位置噪声标准差 (m)
gnss_vel_noise_std = 0.1; % GNSS速度噪声标准差 (m/s)
%% 过程噪声协方差矩阵Q (8×8)
完整代码的下载链接:
https://download.youkuaiyun.com/download/callmeup/91777849
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者


















 234
234

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











